机器学习装置、am装置、机器学习方法及学习模型的生成方法
技术领域
1.本技术涉及机器学习装置、am装置、机器学习方法及学习模型的生成方法。
背景技术:
2.已知根据表达出三维物体的计算机上的三维数据对三维物体直接进行造型的技术。例如,已知有增材制造(additive manufacturing)(am)(附加制造)法。作为一例,在使用金属粉体的am法中,通过对铺设的金属粉体向造型的部分照射作为热源的激光束或电子束而使金属粉体熔融、凝固或烧结,从而对三维物体的各层进行造型。在am法中,通过反复这样的工序,能够对期望的三维物体进行造型。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2015/151839号
6.专利文献2:日本特开2018-123381号公报
技术实现要素:
7.在将金属粉体用作材料的am装置中,由于按各层扫描射束而形成造型物的各层,因此若造型物变大,则造型时间也会变长。作为am装置的课题之一,期望缩短造型时间。为了缩短造型时间,考虑在一次的层叠工序中较厚地铺设金属粉体并在一次的层叠工序中较厚地进行造型的对策。但是,若较厚地铺设金属粉体,则由于材料的热传导特性,热量移动到内部需要花费一定的时间,因此有时仅金属粉体层的表面熔融,内部不熔融而无法适当地进行造型。另外,还有考虑增大射束的照射能量及扫描速度来缩短造型时间的对策。但是,若增大射束的照射能量,则金属粉体层的表面会过度升温,容易产生烟尘、溅射。若产生烟尘、溅射,则有时会使造型物产生缺陷,或引起射束的照射系统的干扰,有时无法维持稳定的造型。另外,要求在适当的时刻对am装置进行维护以能够维持稳定的造型,但维护的频率越高,am装置的每单位时间的造型速度越降低,并且运行成本越增加。因此,本技术的一个目的在于提供一种在am装置中用于抑制烟尘、溅射的产生并且缩短造型时间的技术。另外,本技术的一个目的在于提供一种在am装置中用于在适当的时刻进行维护的技术。
8.用于解决课题的技术方案
9.根据一个实施方式,提出了一种用于对决定am装置中的造型条件的情况进行机器学习的机器学习装置,该机器学习装置取得状态变量,该状态变量包括与造型中的造型有关的物理量和所述造型条件。所述造型条件包括射束的强度、材料上的射束的尺寸、射束的扫描速度、射束的照射角度、射束的焦点偏移量、射束的焦距、材料的特性、材料的铺设条件、保护气体量、氧浓度以及射束的重叠量中的至少一个。所述物理量包括由拍摄部拍摄到的造型部位的拍摄数据、通过对该拍摄数据进行处理而得到的造型部外观、射束源的电流波形、射束源的电压波形、射束的能量、造型腔室内的壁面温度、凝固部的厚度、造型焊道宽度以及溅射产生量中的至少一个。并且,机器学习装置基于所述状态变量来进行用于决定
所述造型条件的学习模型的学习及所述造型条件的决定。
10.根据一个实施方式,提出了一种用于对决定am装置中的造型条件的情况进行机器学习的机器学习方法,该机器学习方法取得状态变量,该状态变量包括与造型中的造型有关的物理量和所述造型条件。所述造型条件包括射束的强度、材料上的射束的尺寸、射束的扫描速度、射束的照射角度、射束的焦点偏移量、射束的焦距、材料的特性、材料的铺设条件、保护气体量、氧浓度以及射束的重叠量中的至少一个。所述物理量包括由拍摄部拍摄到的造型部位的拍摄数据、通过对该拍摄数据进行处理而得到的造型部外观、射束源的电流波形、射束源的电压波形、射束的能量、造型腔室内的壁面温度、凝固部的厚度、造型焊道宽度以及溅射产生量中的至少一个。并且,机器学习方法基于所述状态变量,进行用于决定所述造型条件的学习模型的学习及所述造型条件的决定。
11.根据一个实施方式,提出了一种学习模型的生成方法,所述学习模型用于决定am装置中的造型条件,该方法取得多个状态变量,该状态变量包括与造型中的造型相关的物理量和所述造型条件。所述造型条件包括射束的强度、材料上的射束的尺寸、射束的扫描速度、射束的照射角度、射束的焦点偏移量、射束的焦距、材料的特性、材料的铺设条件、保护气体量、氧浓度以及射束的重叠量中的至少一个。所述物理量包括由拍摄部拍摄到的造型部位的拍摄数据、通过对该拍摄数据进行处理而得到的造型部外观、射束源的电流波形、射束源的电压波形、射束的能量、造型腔室内的壁面温度、凝固部的厚度、造型焊道宽度以及溅射产生量中的至少一个。并且,所述方法基于所述取得的所述多个状态变量,生成输入所述状态变量并输出所述造型条件的学习模型。
附图说明
12.图1是概略地示出一个实施方式的用于制造造型物的am装置的图。
13.图2是本实施方式中的机器学习装置的概略的功能框图。
14.图3是概略地示出加热sus后的情况下的温度和状态变化的图。
15.图4是用于说明在向材料的表面照射射束时热从材料粉的表面向下方传递时的温度上升的图。
16.图5是概略地示出对作为材料的sus的表面进行加热时的下表面的温度上升的曲线图。
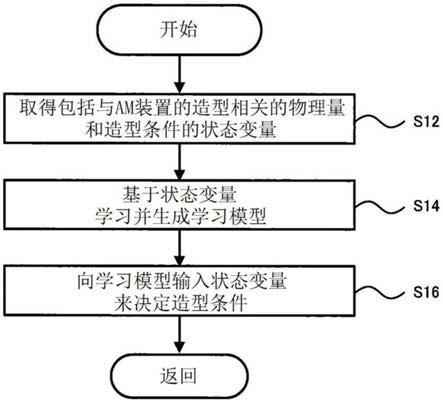
17.图6是示出基于机器学习装置的、对决定造型条件的情况进行机器学习的方法的一例的流程图。
18.图7是示出变形例中的am系统的结构概略的图。
具体实施方式
19.以下,与附图一起说明用于制造本发明的造型物的am装置的实施方式。在附图中,对相同或类似的要素标注相同或类似的附图标记,在各实施方式的说明中有时省略与相同或类似的要素相关的重复说明。另外,各实施方式所示的特征只要不相互矛盾就也能够应用于其他实施方式。
20.图1是概略地示出一个实施方式的用于制造造型物的am装置的图。如图1所示,am装置100包括造型腔室102。在造型腔室102的底面104安装有构建腔室106。在构建腔室106
中设置有升降台108。升降台108能够利用驱动机构110在上下方向(z方向)上移动。驱动机构110例如可以是气压式、液压式的驱动机构,也可以是由马达及滚珠丝杠构成的驱动机构。此外,虽然未图示,但在升降台108设置有用于对与造型腔室102的内壁之间的间隙进行密封的密封体。另外,虽然未图示,但也可以在造型腔室102配置用于导入及排出保护气体的入口及出口。
21.在一个实施方式中,如图1所示,在升降台108之上配置有xy工作台112。xy工作台112是能够在与升降台108的平面平行的两个方向(x方向、y方向)上移动的工作台。在xy工作台112之上配置有用于支承造型物的材料的基板114。
22.在造型腔室102内,在构建腔室106的上方配置有用于供给造型物的材料的材料供给机构150。材料供给机构150具备用于保持作为造型物的材料的粉末152、例如金属粉末的储藏容器154和用于使储藏容器154移动的移动机构160。在储藏容器154设置有用于将材料粉末152排出到基板114上的开口156。开口156例如可以是比基板114的一边长的直线状的开口156。在该情况下,通过构成为使移动机构160在与开口156的直线正交的方向上在比基板114的另一方的边更长的范围内移动,从而能够向基板114的整个面供给材料粉末152。另外,储藏容器154具备用于控制开口156的开闭的阀158。材料供给机构150也可以具备用于平整从储藏容器154供给的材料粉末152的辊159。辊159能够构成为能够一边使任意的压力作用于粉末152,一边使供给到基板114上的粉末152平整。
23.在图1中,仅配置有一个储藏容器154,但作为一个实施方式,也可以配置多个储藏容器154。在设置多个储藏容器154的情况下,可以在各储藏容器154中保持不同的材料,另外,也可以保持相同的材料但粒径不同的材料粉末152。
24.在一个实施方式中,如图1所示,am装置100具备射束源170及将从射束源170发出的射束172朝向基板114上的材料粉末152引导的扫描机构174。另外,图1所示的am装置100具备用于调整所照射的射束的强度的调整装置171。该调整装置171能够构成为调整向作为射束源170的激光光源、电子束源供给的电流、电压或功率的大小。进一步,图1所示的am装置100具备用于调整所照射的射束的形状及轮廓的射束整形器173。扫描机构174构成为能够向基板114上的造型面(聚焦面)的任意位置照射射束172。扫描机构174例如在使用激光光源作为射束源170的情况下能够由任意的光学系统构成,在使用电子束源作为射束源170的情况下能够由磁铁等构成。在图示的实施方式中,射束源170、调整装置171、射束整形器173及扫描机构174配置在造型腔室102内,但它们的全部或一部分也可以配置在造型腔室102的外部。
25.在一个实施方式中,am装置100具备用于观测通过向材料粉末152的射束照射而形成的熔融池的熔融池监视器175。熔融池监视器175能够包括非接触式的传感器,例如,能够使用如下方式:使用测定波长约650nm的单色辐射温度计,与金属熔融用的射束轴重叠地向熔融池照射测定用的激光,用硅等检测元件接收反射光。熔融池监视器175也可以是测定熔融池的温度、液面形状、深度、一层中凝固的材料的厚度等的熔融池监视器。此外,测定用的激光使用与熔融用的射束波长不同的波长。由熔融池监视器175测定出的温度数据被发送到控制装置200。此外,熔融池监视器175能够使用包括公知的熔融池监视器在内的任意的熔融池监视器。
26.在一个实施方式中,am装置100具备用于拍摄造型物的形状的拍摄部250。在一个
实施方式中,拍摄部250能够设为能够三维地测定造型中途的造型物m1的表面形状的3d摄像机。由拍摄部250拍摄到的拍摄数据被发送到控制装置200。此外,拍摄部250能够使用包括公知的拍摄部在内的任意的拍摄部。
27.在一个实施方式中,am装置100具备用于检测所照射的射束的能量的射束监视器251。射束监视器251能够是配置在射束的路径上的受光元件、法拉第杯等。或者,射束监视器251也可以配置在反射的射束、从射束的路径透过的射束所到达的位置。此外,射束监视器251能够使用包括公知的射束监视器在内的任意的射束监视器。
28.在一个实施方式中,am装置100具备测量流经射束源170的电流的电流传感器252。另外,在一个实施方式中,am装置100具备测量向射束源170供给的电压的电压传感器253。此外,电流传感器252及电压传感器253能够使用包括公知的电流传感器及电压传感器在内的任意的传感器。
29.在一个实施方式中,am装置100具备用于检测造型腔室102内的壁面的温度的温度计254。此外,温度计254可以是接触式,也可以是非接触式,能够使用包括公知的温度计在内的任意的温度计。
30.在一个实施方式中,am装置100具备对造型腔室102内的氧浓度进行测定的浓度计255。此外,浓度计255能够使用包括公知的氧浓度计在内的任意的浓度计。
31.在一个实施方式中,am装置100具备用于检测用于平整从储藏容器154供给的材料粉末152的辊159的移动机构的驱动转矩的驱动转矩监视器256。此外,驱动转矩监视器256能够使用测量流经辊159的移动机构的电流等任意的驱动转矩监视器。
32.在一个实施方式中,am装置100具备用于检测升降台108的驱动机构110的转矩的驱动转矩监视器257。此外,驱动转矩监视器257能够使用测量流经驱动机构110的电流等任意的驱动转矩监视器。
33.在图1所示的实施方式中,am装置100具有控制装置200。控制装置200构成为对am装置100的各种动作机构、例如上述的驱动机构110、移动机构160、射束源170、调整装置171、射束整形器173、扫描机构174以及开口156的阀158等的动作进行控制。另外,控制装置200构成为从各种测量设备、例如熔融池监视器175、拍摄部250、射束监视器251、电流传感器252、电压传感器253、温度计254以及驱动转矩监视器256、257等接收测定数据。控制装置200具备cpu、存储器等,既可以由使用软件实现规定的功能的一般的计算机构成,也可以由进行专用的运算处理的硬件电路构成。
34.在利用图1所示的实施方式的am装置100对三维物体进行造型的情况下,大致按照以下的步骤进行。首先,将造型对象物的三维数据d1输入到控制装置200。控制装置200根据所输入的造型物的三维数据d1来制作造型用的切片数据。另外,控制装置200基于切片数据和造型条件s2,制作包含表示以怎样的顺序进行扫描的扫描路线的执行数据。在本实施方式中,造型条件s2由机器学习装置240学习而决定。关于机器学习装置240、基于机器学习装置240的学习以及造型条件s2的决定将在后面叙述。在此,造型条件s2例如包括射束条件、射束扫描条件、材料条件、材料的铺设条件及造型腔室102的气氛条件中的至少一个。射束条件包括射束的强度、材料上的射束的尺寸、(相对于xy平面的)射束的照射角度、材料上的射束的焦点偏移量以及射束的焦距中的至少一个。射束的强度包括射束源170的电流、射束源170的电压以及射束172的能量中的至少一个,材料上的射束的尺寸包括射束172的沿着
扫描方向的尺寸、射束172的与扫描方向垂直的尺寸中的至少一个。射束扫描条件包括射束的扫描速度、扫描模式、射束的重叠量(扫描间隔)中的至少一个。作为扫描模式,例如存在向一个方向扫描的情况、沿往复方向扫描的情况、以锯齿状进行扫描的情况以及一边描绘小的圆一边在横向上移动的情况等。材料条件包括材料粉末152的密度、比热、热传导率中的至少一个。材料的铺设条件包括材料的一层的铺设厚度、由辊159作用于材料的压力中的至少一个。造型腔室102的气氛条件包括向造型腔室102内供给的保护气体量。
35.在储藏容器154内放入造型物的材料粉末152、例如金属粉末。使构建腔室106的升降台108移动至上方的位置,使基板114的表面到达射束172的聚焦面。接着,打开储藏容器154的开口156的阀158,使储藏容器154移动,将材料粉末152均匀地供给到基板114上。材料供给机构150由控制装置200控制,以将相当于造型物的一层的量的材料粉末152供给到聚焦面。接着,从射束源170发出射束172,利用扫描机构174,将射束172照射到聚焦面的规定范围,使规定位置的材料粉末熔融及凝固或烧结,形成一层量的造型物m1。此时,根据需要,也可以使配置在升降台108之上的xy工作台112移动来变更射束172的照射位置。
36.在一层量的造型结束后,使构建腔室106的升降台108下降与一层相当的量。再次,利用材料供给机构150,将相当于造型物的一层的量的材料粉末152供给到聚焦面。然后,利用扫描机构174在聚焦面上扫描射束172,使规定位置的材料粉末152熔融及凝固或烧结,形成一层量的造型物m1。通过反复进行这些动作,能够由粉末152形成作为目标的造型物m1的整体。
37.在本实施方式中,am装置100具备用于对决定造型条件的情况进行机器学习的机器学习装置240。机器学习装置240具备cpu、存储器(存储器240a)等,既可以由使用软件实现规定功能的一般的计算机构成,也可以由进行专用的运算处理的硬件电路构成。机器学习装置240构成为能够通过有线或无线与控制装置200进行通信。此外,在本实施方式中,机器学习装置240作为与控制装置200不同的结构示出,但机器学习装置240的至少一部分也可以与控制装置200一体地构成。
38.图2是本实施方式中的机器学习装置240的概略的功能框图。机器学习装置240具备:取得状态变量sv的状态变量取得部2402、基于取得的状态变量sv来学习并生成学习模型的学习模型生成部2404以及基于所取得的状态变量sv和学习模型来选择(意思决定)am装置100的造型条件的意思决定部2408。
39.状态变量取得部2402每隔规定时间(例如,数毫秒、数十毫秒)取得状态变量sv。作为一例,规定时间能够设为与基于学习模型生成部2404的学习周期相同或对应的时间。作为一例,状态变量取得部2402能够通过控制装置200取得状态变量sv。状态变量sv包括与造型中的造型相关的物理量s1(以下也简称为“物理量s1”)和基于上述的am装置100的造型条件s2。在此,在以下的说明中,物理量s1表示由各种传感器测定的物理量,造型条件s2表示基于控制装置200的控制指令,但并不限定于这样的例子。此外,作为一例,状态变量取得部2402也可以从各种传感器直接取得至少一部分的物理量s1。另外,作为一例,状态变量取得部2402也可以通过参照由意思决定部2408决定并存储于存储器240a(参照图1)的造型条件s2(在一个学习周期前决定的造型条件s2),来取得至少一部分的造型条件s2。
40.物理量s1包括由拍摄部250拍摄到的造型部位的拍摄数据、通过对拍摄数据进行处理而得到的造型部外观、来自电流传感器252的射束源170的电流波形、来自电压传感器
253的射束源170的电压波形、来自射束监视器251的射束的能量、来自温度计254的造型腔室102内的壁面温度、来自熔融池监视器175的凝固部的厚度、来自熔融池监视器175的造型焊道宽度、来自浓度计255的氧浓度以及溅射产生量中的至少一个。此外,作为一例,溅射产生量能够通过对由拍摄部250取得的拍摄数据进行处理而根据形成于造型物(凝固部)的溅射痕而算出。这些物理量s1是能够通过变更造型条件s2的至少一个要素而变化的物理量。
41.学习模型生成部2404按照统称为机器学习的任意的学习算法,对学习模型(相对于状态变量sv的am装置100的造型条件s2)进行学习。学习并生成的学习模型被存储在存储器240a中。学习模型生成部2404反复执行基于由状态变量取得部2402取得的状态变量sv的学习。学习模型生成部2404取得多个状态变量sv,识别状态变量sv的特征来解释相关性。另外,学习模型生成部2404对针对当前的状态变量sv决定了某个造型条件s2时的下次取得的状态变量sv的相关性进行解释。然后,学习模型生成部2404通过反复进行学习,实现针对所取得的状态变量sv的造型条件s2的决定的最优化。作为一例,学习模型生成部2404例如为了能够实现后述的材料的平稳条件下的熔融,学习并生成学习模型,由此以使射束照射位置的温度成为材料的熔点 2%~10%的范围的方式决定造型条件。另外,作为一例,学习模型生成部2404以造型结果对于造型对象物的三维数据d1(形状指令)的追随度变高的方式,即,以造型出的造型物相对于造型指令误差变少的方式,学习并生成学习模型。另外,作为一例,学习模型生成部2404以对造型物进行造型所花费的时间变短的方式,学习并生成学习模型。此外,机器学习装置240也可以基于状态变量sv,对造型结果相对于造型指令的追随度、对造型物进行造型所花费的时间进行计算。另外,作为一例,学习模型生成部2404以造型中的造型条件s2的变化变小的方式,学习并生成学习模型。
42.学习模型生成部2404能够按照统称为机器学习的任意的学习算法来学习学习模型,作为一例,能够执行强化学习。机器学习是在某种环境下对当前状态(输入)执行的行动(输出)赋予奖励,生成能够得到最大奖励的学习模型的方法。作为进行强化学习的一例,学习模型生成部2404具有:基于状态变量s1计算评价值的评价值计算部2405和基于评价值进行所述学习模型的学习的学习部2406。以下,作为机器学习的一例,说明使用了q学习(q-learning)的学习模型生成部2404的学习方法。
43.在q学习中,是将行动主体的状态s(在本实施方式中相当于状态变量sv)和在该状态下行动主体能够选择的行动a(在本实施方式中相当于造型条件s2)作为独立变量,并对表示在状态s下选择了行动a的情况下的行动的价值的函数q(s,a)进行学习的方法。在状态s下选择价值q(s,a)变得最高的行动a成为最优解。在状态s与行动a的相关性未知的状态下开始q学习,在任意的状态s下反复进行选择各种行动a的试错,由此反复更新价值函数q,接近最优解。函数q(s,a)的更新式由以下的式子表示。
44.[数学式1]
[0045][0046]
在此,s
t
以及a
t
是时刻t的状态及行动,根据行动a
t
,状态变化为s
t 1
。r
t 1
是指在状态s下进行行动a时的奖励。maxq的项是指在时刻t 1进行成为最大的价值q(和在时刻t考虑的)的行动a时的q的值。α是学习系数,以0<α≤1任意设定。γ是折扣率,以0<γ≤1任意设定。另外,评价值计算部2405在数学式1中将状态变量sv作为状态s,将造型条件s2作为行动
a,计算奖励r。
[0047]
作为一例,评价值计算部2405也可以构成为,物理量s1的稳定度越高则赋予越大的奖励r,即,上次取得的物理量s1与本次取得的物理量s1的变化越小则赋予越大的奖励r。另外,作为一例,评价值计算部2405也可以构成为,造型条件s2(控制指令)和与该造型条件s2对应的物理量s1的偏差越小则赋予越大的奖励r,即,控制指令与实测值的偏差越小则赋予越大的奖励r。另外,作为一例,评价值计算部2405也可以构成为,溅射产生量越小则赋予越大的奖励r。另外,作为一例,评价值计算部2405也可以构成为,am装置100中的能量消耗量越小则赋予越大的奖励r。另外,作为一例,评价值计算部2405也可以构成为,造型结果对于形状指令的追随度越高则赋予越大的奖励r。另外,作为一例,评价值计算部2405也可以构成为,造型所花费的时间越短则赋予越大的奖励r。另外,作为一例,评价值计算部2405也可以构成为,将造型外观部的适当与否区分为两个阶段以上,造型外观部越是优选的状态,则赋予越大的奖励r。
[0048]
另外,作为一例,评价值计算部2405也可以构成为,在射束照射位置的温度成为材料的熔点 2%~10%的范围时,即,当材料152在平稳条件下熔融时,赋予大的奖励r。在此,对平稳的熔融进行说明。在以下的说明中,作为一例,对使用不锈钢(sus)作为材料粉末152的情况进行说明。图3是概略地示出对sus进行加热的情况下的温度和状态变化的图。如图3所示,当加热sus时达到熔点(t1),成为固体和液体混合的状态。若进一步继续加热,则sus全部成为液体的状态。当进一步对sus进行加热时达到沸点(t2),成为气体混入液体的状态,通过进一步加热,sus全部成为气体的状态。在图3中,作为一例,列举了熔点(t1)为1450℃、沸点(t2)为2750℃的sus,但需要注意的是,即使是sus,由于成分的不同,沸点、熔点等物性也不同。在am法中,使材料粉末熔融、凝固而对期望的物体进行造型,因此需要将材料粉末加热至熔点以上。
[0049]
图4是用于说明在向材料的表面照射射束时热从材料的表面向下方传递时的温度上升的图。图4示出从上方观察被照射了射束的材料粉末152的状态和从侧方观察被照射了射束的材料粉末152的状态。如图4所示,假设照射了直径d的射束。如图4所示,考虑直径d的射束点中的面积δa、厚度δ的区域的热传导及温度上升。
[0050]
射束照射前的材料152的表面的温度(ta(0))与材料的下表面的温度(tb(0))相同。即,ta(0)=tb(0)。从射束照射起经过了任意的时间t时的材料的下表面的温度tb(t)由
[0051]
公式(1):tb(t)=(ta(t)-ta(0))
×
(1-exp(-t/τc)) tb(0)
[0052]
表示。
[0053]
这里,τc是时间常数,由
[0054]
公式(2):τc=(m
×
c)
×r[0055]
表示。
[0056]
其中,
[0057]
m:质量[kg]=δa
×
δ
×
ρ
[0058]
ρ:密度[kg/m3]
[0059]
c:比热[j/kg
·
k]
[0060]m×
c:热容[j/k]
[0061]
r:热阻[k/w]。
[0062]
另外,热阻r由
[0063]
公式(3):r=(δ/(λ
×
δa))
[0064]
表示。
[0065]
其中,
[0066]
λ:热传导率[w/m
·
k]。
[0067]
另外,时间常数τc能够根据公式(2)及公式(3)表示为
[0068]
公式(4):τc=(δa
×
δ
×
ρ
×
c)
×
(δ/(λ
×
δa))=ρ
×c×
δ2/λ。
[0069]
图5是概略地示出对作为材料的sus的表面ta进行加热时的下表面tb的温度上升的曲线图。图5中的曲线l1表示在通过射束的照射而使材料的表面的温度达到大致熔点(t1=1450℃)的条件(平稳条件)下照射射束时的材料的下表面的温度变化。即,是ta(t)=1450℃的条件。另外,图5中的曲线l2表示在通过射束的照射而使材料的表面的温度达到大致沸点(t2=2750℃)的条件(严格条件)下照射射束时的材料的下表面的温度变化。即,是ta(t)=2750℃的条件。时间常数τc是由材料的物性及配置(厚度δ)决定的条件,因此根据公式(1)及图5的曲线图可知,在严格条件下照射射束时,材料的下表面达到熔点(t1)的时间δt变短。即,射束输出越大,材料的下表面达到熔点(t1)的时间δt越短。因此,在am法中,作为缩短造型时间的一个对策,考虑增大射束的输出,增大射束的扫描速度。但是,如上所述,若增大射束的照射能量,则材料粉末层的表面会过度升温,容易产生烟尘、溅射,有时会使造型物产生缺陷或引起am装置的射束照射系统的干扰。因此,在一个实施方式中,学习模型生成部2404以在平稳条件下缩短造型时间的方式进行学习模型的学习及生成。
[0070]
假设在基于平稳条件的射束照射的情况下,材料的表面温度ta(t)在某一瞬间达到熔点(t1=1450℃),在射束的照射中的某时间δt的期间维持表面温度ta(t)=t1(=1450℃)。在基于这样的假定的平稳条件的情况下,从材料的表面到深度δ的下表面的温度tb(t)达到熔点(t1=1450℃)所需的时间δt成为
[0071]
公式(5):δt≈4τc=4
×
ρ
×c×
δ2/λ。
[0072]
此外,公式(5)在公式(1)中,将tb(t)达到表面的温度上升量(ta(t)-ta(0))的约98%为止的时间设为δt。更严格地说,能够将表面温度ta(t)维持为t1(=1450℃)的时间由材料从固体向液体相变所需的潜热的吸收和基于该期间的热传导的扩散热量决定,若经过该时间,则表面温度ta(t)开始上升。由此,下表面的温度tb(t)也上升,能够达到熔点以上。另外,通过观测表面温度ta(t)并以表面温度ta(t)成为材料的熔点 2%~10%的范围的方式控制射束的照射能量及射束的扫描的方法,也能够实现本技术所期望的平稳的熔融。在此,重视能够通过公式(5)对每个材料的密度ρ、比热c、热传导率λ、厚度δ与所需时间δt的关系进行参数比较(定性比较),并且能够进行相对的定量比较。在一个实施方式中,为了实现基于平稳条件的造型,也可以以射束的照射时间处于约2τc至约4τc之间且材料的下表面的温度达到熔点的方式确定射束的强度及材料上的射束尺寸。或者,也可以以使射束的照射时间处于约3τc至约4τc之间并实现基于平稳条件的造型的方式决定射束的强度及材料上的射束尺寸。即,作为一例,评价值计算部2405也可以构成为,在材料的下表面的温度在约2τc到约4τc之间达到熔点时,赋予较大的评价r。另外,作为一例,评价值计算部2405也可以构成为,在材料的下表面的温度在约3τc到约4τc之间达到熔点时,赋予较大的奖励r。
[0073]
根据公式(4)及公式(5)可知,τc与材料的厚度δ的二次方成比例,因此若减小材料的厚度δ,则时间常数τc变小,其结果是,δt也变小。因此,作为一例,评价值计算部2405也可以构成为,每一层的厚度δ越小则赋予越大的评价r。
[0074]
再次参照图2。意思决定部2408基于利用学习模型生成部2404学习并生成的学习模型和利用状态变量取得部2402取得的状态变量sv来决定am装置100的造型条件并向控制装置200输出。此外,基于意思决定部2408的造型条件的决定既可以按与基于学习模型生成部2404的学习周期相同或者对应的时间进行,也可以每隔比学习周期短或者长的时间进行。
[0075]
图6是示出基于机器学习装置240的、对决定造型条件的情况进行机器学习的方法的一例的流程图。机器学习装置240(状态变量取得部2402)取得包含物理量s1和造型条件s2的状态变量sv(步骤s12)。接着,机器学习装置240(学习模型生成部2404)基于所取得的状态变量sv来进行学习模型的学习及生成(步骤s14)。然后,机器学习装置240(意思决定部2408)通过将状态变量取得部2402取得的状态变量sv输入到在学习部2406中学习并生成的学习模型,从而决定am装置100中的造型条件(步骤s16)。
[0076]
如以上说明的那样,本实施方式的机器学习装置240在状态变量取得部2402中取得包含与造型中的造型有关的物理量s1和am装置100的造型条件s2的状态变量sv。在此,造型条件s2包括射束的强度、材料上的射束的尺寸、射束的扫描速度、射束的照射角度、射束的焦点偏移量、射束的焦距、材料的特性、材料的铺设条件、保护气体量以及射束的重叠量中的至少一个。另外,物理量s1包括由拍摄部250拍摄到的造型部位的拍摄数据、通过对拍摄数据进行处理而得到的造型部外观、射束源170的电流波形、射束源170的电压波形、射束的能量、造型腔室102内的壁面温度、凝固部的厚度、造型焊道宽度、氧浓度以及溅射产生量中的至少一个。然后,机器学习装置240基于所取得的状态变量sv而进行用于决定造型条件的学习模型的学习及造型条件的决定。由此,能够在am装置中决定适当的造型条件。
[0077]
(变形例1)
[0078]
上述的机器学习装置240对决定am装置100的造型条件s2的情况进行机器学习。机器学习装置240也可以构成为,代替am装置100的造型条件s2或者在此基础上,对决定am装置100的维护时期的情况进行机器学习。此外,机器学习装置240也可以采用不同的机器学习的算法,例如针对造型条件s2通过强化学习来学习并生成学习模型、针对维护时期通过监督学习来学习并生成学习模型等。另外,作为一个实施方式,机器学习装置240也可以构成为,针对am装置100的预定的结构的每个组来决定维护时期。
[0079]
作为一个实施方式,关于基于机器学习装置240的维护时期的决定的学习是基于上述的状态变量sv来进行的。作为一例,状态变量sv中的物理量s1包括造型腔室102内的壁面温度、am装置100的机构系统的驱动转矩中的至少一个。作为一例,由于可认为造型腔室102内的壁面温度越高,则越促进用于密封造型腔室102的内壁与升降台108的密封体的劣化,因此机器学习装置240以提前决定维护时期的方式学习并生成学习模型。另外,作为一例,基于升降台108的驱动机构110的驱动转矩越大,则机器学习装置240判断为密封体越劣化,因此以提前决定维护时期的方式学习并生成学习模型。另外,作为一例,为了使维护的频率变少,机器学习装置240以在am装置100不产生异常的范围内延迟决定维护时期的方式学习并生成学习模型。
[0080]
然后,机器学习装置240或控制装置200向利用机器学习装置240学习并生成的学习模型输入状态变量sv,输出维护时期。am装置100可以利用显示器等未图示的通知单元向用户通知输出的维护时期。通过这样,机器学习装置240针对am装置100的维护时期的决定学习并生成学习模型,从而能够在适当的时期进行am装置100的维护,能够实现am装置100的效率化。
[0081]
(变形例2)
[0082]
在上述的实施方式中,机器学习装置240搭载于am装置100,并构成为基于该am装置100中的状态变量sv,学习并生成用于决定造型条件s2的学习模型。然而,并不限定于这样的例子,机器学习装置240也可以设置于am装置100的外部,并构成为能够通过有线或无线与am装置100进行通信。在该情况下,机器学习装置240可以通过通信从am装置100取得状态变量sv,并基于所取得的状态变量sv来进行学习模型的学习及生成。在该情况下,作为一例,机器学习装置240也可以基于状态变量sv来决定am装置100的造型条件并向am装置100发送。另外,作为一例,机器学习装置240也可以将更新后的学习模型发送给am装置100,进行利用了在am装置100中更新后的学习模型的造型条件的决定。
[0083]
图7是示出变形例中的am系统的结构概略的图。am系统具备机器学习装置240和通过有线或无线能够通信地连接的多个am装置(在图4所示的例子中为三个am装置1000a、1000b、1000c)。变形例中的机器学习装置240构成为能够实现与上述的实施方式中的机器学习装置240大致相同的功能,省略重复的说明。变形例的机器学习装置240能够从多个am装置取得状态变量sv。由此,机器学习装置240能够取得更多的状态变量sv,提高学习模型的学习精度。作为一例,也可以在多个am装置中包括不具备机器学习装置的am装置1000a。在不具备机器学习装置的情况下,am装置1000a既可以构成为利用在机器学习装置240中决定的造型条件s2来进行造型,也可以构成为通过使用从机器学习装置240发送并更新的学习模型来决定造型条件s2并进行造型。另外,作为一例,也可以在多个am装置中包括具备机器学习装置的am装置1000b、1000c。am装置1000b、1000c具备具有与上述实施方式中的机器学习装置240相同的功能及结构的机器学习装置240b、240c。在该情况下,各个机器学习装置240、240b、240c也可以构成为相互取得各自生成的学习模型,在各机器学习装置240、240b、240c中实现学习模型的最优化。另外,也可以构成为,机器学习装置240、240b、240c中的任一个机器学习装置作为上位的机器学习装置发挥功能,取得多个学习模型,实现学习模型的最优化,向下位的机器学习装置发送更新后的学习模型。在此,作为机器学习装置进行的学习模型的最优化的例子,可列举基于多个学习模型的蒸馏模型的生成。
[0084]
以上,基于几个例子对本发明的实施方式进行了说明,但上述的发明的实施方式是用于容易理解本发明,并不是限定本发明。本发明能够在不脱离其主旨的情况下进行变更、改良,并且在本发明中当然包含其等同物。另外,在能够解决上述课题的至少一部分的范围、或者起到效果的至少一部分的范围内,能够进行本发明请求保护的范围及说明书所记载的各构成要素的任意的组合或者省略。
[0085]
从上述的实施方式至少掌握以下的技术思想。
[0086]
[方案1]根据方案1,提出了一种用于对决定am装置中的造型条件的情况进行机器学习的机器学习装置,所述机器学习装置取得状态变量,该状态变量包括与造型中的造型相关的物理量和所述造型条件,所述造型条件包括射束的强度、材料上的射束的尺寸、射束
的扫描速度、射束的照射角度、射束的焦点偏移量、射束的焦距、材料的特性、材料的铺设条件、保护气体量以及射束的重叠量中的至少一个,所述物理量包括由拍摄部拍摄到的造型部位的拍摄数据、通过对该拍摄数据进行处理而得到的造型部外观、射束源的电流波形、射束源的电压波形、射束的能量、造型腔室内的壁面温度、凝固部的厚度、造型焊道宽度、氧浓度以及溅射产生量中的至少一个,基于所述状态变量,进行用于决定所述造型条件的学习模型的学习及所述造型条件的决定。根据方案1,能够决定am装置中的适当的造型条件。
[0087]
[方案2]根据方案2,在方案1中,所述机器学习装置具有基于所述状态变量来计算评价值的评价值计算部和基于所述评价值来进行所述学习模型的学习的学习部。
[0088]
[方案3]根据方案3,在方案2中,所述机器学习装置基于所述状态变量来算出造型结果对于形状指令的追随度和造型所花费的时间,所述追随度越高及所述时间越短,所述评价值计算部赋予越高的评价值。根据方案3,能够决定造型条件而能够使造型结果接近形状指令并且减少造型所花费的时间。
[0089]
[方案4]根据方案4,在方案2或3中,所述评价值计算部满足如下情况中的至少一个:所述物理量的稳定度越高则赋予越高的评价值;所述am装置的控制指令和与该控制指令对应的所述物理量的偏差越小则赋予越高的评价值;针对所述am装置的控制指令的响应时间越短则赋予越高的评价值;所述溅射产生量越小则赋予越高的评价值;所述am装置中的能量消耗量越小则赋予越高的评价值。
[0090]
[方案5]根据方案5,在方案1至4中,所述材料的铺设条件包括材料的铺设厚度和在材料的铺设时作用的压力中的至少一个。
[0091]
[方案6]根据方案6,在方案1至5中,所述射束的强度包括射束源的电流、射束源的电压以及射束的能量中的至少一个。
[0092]
[方案7]根据方案7,在方案1至6中,所述材料上的射束的尺寸包括射束的沿着扫描方向的尺寸和射束的与扫描方向垂直的尺寸中的至少一个。
[0093]
[方案8]根据方案8,在方案1至7中,所述材料的特性包括密度、比热以及热传导率中的至少一个。
[0094]
[方案9]根据方案9,在方案1至8中,进行所述学习模型的学习,由此以使材料的表面温度成为熔点 2%~10%的温度的方式决定所述造型条件。
[0095]
[方案10]根据方案10,在方案1至9中,构成为能够输出所述am装置的维护时刻,基于所述状态变量,进行用于算出所述维护时刻的学习模型的学习及所述维护时刻的算出。
[0096]
[方案11]根据方案11,在方案10中,所述物理量包括造型腔室内的壁面温度和所述am装置的机构系统的驱动转矩中的至少一个。
[0097]
[方案12]根据方案12,提出了一种am装置,所述am装置具备方案1至11中任一项所述的机器学习装置,基于从所述机器学习装置输出的造型条件对造型物进行造型。根据方案12,能够基于从机器学习装置输出的造型条件对造型物进行造型,能够在抑制烟尘、溅射的产生的同时实现造型时间的缩短。
[0098]
[方案13]根据方案13,提出了一种用于对决定am装置中的造型条件的情况进行机器学习的机器学习方法,所述机器学习方法取得状态变量,该状态变量包括与造型中的造型相关的物理量和所述造型条件,所述造型条件包括射束的强度、材料上的射束的尺寸、射束的扫描速度、射束的照射角度、射束的焦点偏移量、射束的焦距、材料的特性、材料的铺设
条件、保护气体量以及射束的重叠量中的至少一个,所述物理量包括由拍摄部拍摄到的造型部位的拍摄数据、通过对该拍摄数据进行处理而得到的造型部外观、射束源的电流波形、射束源的电压波形、射束的能量、造型腔室内的壁面温度、凝固部的厚度、造型焊道宽度、氧浓度以及溅射产生量中的至少一个,基于所述状态变量,进行用于决定所述造型条件的学习模型的学习及所述造型条件的决定。根据方案13,能够决定am装置中的适当的造型条件。
[0099]
[方案14]根据方案14,提出了一种学习模型的生成方法,所述学习模型用于决定am装置中的造型条件,所述学习模型的生成方法取得多个状态变量,该状态变量包括与造型中的造型相关的物理量和所述造型条件,所述造型条件包括射束的强度、材料上的射束的尺寸、射束的扫描速度、射束的照射角度、射束的焦点偏移量、射束的焦距、材料的特性、材料的铺设条件、保护气体量以及射束的重叠量中的至少一个,所述物理量包括由拍摄部拍摄到的造型部位的拍摄数据、通过对该拍摄数据进行处理而得到的造型部外观、射束源的电流波形、射束源的电压波形、射束的能量、造型腔室内的壁面温度、凝固部的厚度、造型焊道宽度、氧浓度以及溅射产生量中的至少一个,基于所述取得的多个状态变量,生成输入所述状态变量并输出所述造型条件的学习模型。根据方案14,能够生成能够决定am装置中的适当的造型条件的学习模型。
[0100]
本技术主张基于在2019年9月4日申请的日本专利申请号第2019-161267号的优先权。包括日本专利申请号第2019-161267号的说明书、权利要求书、附图及摘要附图在内的所有公开内容通过参考而整体引用到本技术中。国际公开第2015/151839号(专利文献1)及日本特开2005-012238号公报(专利文献2)的所有公开通过参照而整体引用到本技术中。
[0101]
符号说明
[0102]
100
…
am装置
[0103]
102
…
造型腔室
[0104]
106
…
构建腔室
[0105]
108
…
升降台
[0106]
110
…
驱动机构
[0107]
112
…
工作台
[0108]
114
…
基板
[0109]
150
…
材料供给机构
[0110]
152
…
材料粉末
[0111]
154
…
储藏容器
[0112]
159
…
辊
[0113]
160
…
移动机构
[0114]
170
…
射束源
[0115]
171
…
调整装置
[0116]
172
…
激光
[0117]
173
…
射束整形器
[0118]
174
…
扫描机构
[0119]
175
…
熔融池监视器
[0120]
200
…
控制装置
[0121]
240
…
机器学习装置
[0122]
2402
…
状态变量取得部
[0123]
2402
…
学习部模型生成部
[0124]
2404
…
学习模型生成部
[0125]
2405
…
评价值计算部
[0126]
2406
…
学习部
[0127]
2408
…
意思决定部
[0128]
250
…
拍摄部
[0129]
251
…
射束监视器
[0130]
252
…
电流传感器
[0131]
253
…
电压传感器
[0132]
254
…
温度计
[0133]
255
…
浓度计
[0134]
256
…
驱动转矩监视器
[0135]
257
…
驱动转矩监视器
[0136]
d1
…
三维数据
[0137]
m1
…
造型物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
