1.本发明涉及机器人技术领域,更具体的说是一种基于编织纤维束的软体机器人及其驱动方法。
背景技术:
2.软体机器人因其多自由度、高柔顺性和高鲁棒性在工业生产、医疗康复、服务、探测等领域展现出广阔的应用前景。然而,由于目前的软体机器人的基质材料以软材料为主,这导致软体机器人理论上具有无限自由度,输出位移和输出力都难以精确控制。
3.具有主动控制刚度的结构允许软机器与其环境之间进行多功能交互。一方面,高刚度使机器人的高精度、大速度和高作用力的同时输出成为可能。另一方面,在低刚度的情况下,机器人可实现高度一致性、适应性和安全的交互。因此,可变刚度结构对拓宽软体机器人交互应用场景具有重要价值。
技术实现要素:
4.本发明提供一种基于编织纤维束的软体机器人及其驱动方法,目的是可以实现软体机器人的变刚度。
5.上述目的通过以下技术方案来实现:
6.一种基于编织纤维束的软体机器人,包括柱形软体机械臂、通道、气动接头和编织纤维束,所述通道至少设有三个且成周向均匀分布在软体机械臂内形成与通道数量相同的管壁,每个管壁的左部与一个编织纤维束的左端固接,通道的左端封闭,通道右端为开口用于供自身内的编织纤维束延伸至软体机械臂的外部,管壁的右端与编织纤维束之间紧密贴合用以减少气体泄漏,每个通道连通有独立的气动接头,所述气动接头设置在软体机械臂周向的外壁上。
7.每个编织纤维束延伸至软体机械臂外部的部分与一个直线电机输出轴固接。
8.所述软体机器人还包括与气动接头连通的真空泵,所述真空泵能够向任意一或多个通道内进行抽气。
9.上述软体机器人的驱动方法,包括以下步骤:
10.s1:通过直线电机对与自身连接的编织纤维束独立施加位移,实现软体机械臂定向弯曲或伸缩;
11.s2:当软体机械臂到达指定位置时,通过真空泵对通道进行抽真空操作,编织纤维束内部及自身与管壁之间摩擦显著增加,呈现阻塞干扰状态,实现对软体机械臂预定动作的定形与保持。
附图说明
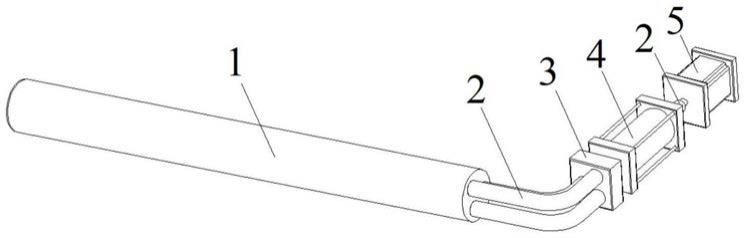
12.图1为本发明的软体机器人未驱动状态下三维结构示意图;
13.图2为本发明的软体机器人未驱动状态下主体结构剖视图;
14.图3为图2中a部分的局部放大图;
15.图4为本发明的软体机器人主体结构另一视角剖视图。
具体实施方式
16.一种基于编织纤维束的软体机器人,如图1至4所示,包括软体机械臂1、管壁11、编织纤维束12、金属片13、通道14、硅胶管2、直线电机3、气动接头4和真空泵5;
17.软体机械臂1成柱形结构,软体机械臂1的内部设有至少三个通道14,通道14之间为互相独立的不相通,全部通道14成周向的均匀分布在软体机械臂1内,软体机械臂1的左端封闭,通道14导通于软体机械臂1的右端形成开口;
18.其中,软体机械臂1采用具有化学惰性且能够拉伸的硅橡胶材料用以使软体机械臂1实现360
°
转向或伸缩;
19.进一步的,软体机械臂1右端的周向上的外壁上固接并连通气动接头4,软体机械臂1上的气动接头4的数量与通道14相同,所述连通指每个通道14都与一个气动接头4连通;
20.进一步的,每个管壁11的左部与一个编织纤维束12的左端固接,编织纤维束12的右端延伸出软体机械臂1;所述管壁11的右端与编织纤维束12紧密贴合使得软体机械臂1内具有一定的密封性。
21.优选的,所述管壁11的左部嵌入有金属片13,所述金属片13上设有与通道14数量和位置对应的圆孔,即每个通道14内存在一个圆孔,圆孔直径等于或大于编织纤维束12的直径,编织纤维束12的左端通过结绳与金属片13连接实现固定,具体的,该结绳一端打结在金属片13上并穿绕在对应的圆孔上,结绳的另一端打结在对应的编织纤维束12上实现的。
22.优选的,管壁11的右端设有瓣膜结构用于与编织纤维束12紧密贴合,以减少气体泄露。
23.驱动方面,每个编织纤维束12延伸至软体机械臂1外部的部分通过与直线电机3输出轴固接,每个编织纤维束12通过一个直线电机3驱动,通过直线电机3分别对编织纤维束12施加不同的位移与拉力,以使软体机械臂1前端可实现360
°
灵活转向或伸缩。
24.进一步的,还包括使软体机械臂1内实现接近真空状态的真空泵5;
25.具体的,所述真空泵5设置的数量与通道14相同,每个气动接头4通过一个硅胶管2与一个真空泵5连接,实现一一连通的效果。
26.优选的,如图1的所述,所述真空泵5设有一个,真空泵5与硅胶管2的一端连通,该硅胶管2的另一端连通一个四通的气动接头4,所述四通的气动接头4与软体机械臂1上的三个气动接头4通过其他硅胶管2一一连通。进而实现位于右侧的硅胶管2上的气动接头4的四通部分与软体机械臂1上的气动接头4的数量一一对应,再将四通气动接头4与软体机械臂1上的三个两通的气动接头4通过其他硅胶管2一一连通,使得真空泵5能够对所述三个两通的通道14进行抽真空操作。
27.驱动方法:软体机械臂1采用编织纤维束12进行线驱动,在真空泵未开启的情况下,通过不同的直线电机3对与自身连接的编织纤维束12施加不同的位移与拉力,软体机械臂1前端可实现360
°
灵活转向或伸缩。
28.当软体机械臂1运动到指定位置时,开启真空泵5,使软体机械臂1内置的通道14内呈近似真空状态,此时,由于受压力梯度作用,编织纤维束14内部多股纤维之间的运动和摩
擦耦合会显著增加,编织纤维束14内部呈现阻塞干扰状态,实现由低刚度向高刚度的转变,软体机械臂1所处的变形状态得到保持,在这种状态下,由于软体机械臂1刚度增大,其前端承载力显著增大。
29.本申请通过线驱动具有结构简单、控制方便且精度较高的特点,而对多股纤维通过编织方式集成的编织纤维束14易制造、易扩展、成本低,施加压力梯度的情况时,多股纤维之间的运动和摩擦耦合会显著增加,从而导致编织纤维束的刚度等机械性能发生显著变化,这种干扰结构具有易扩展、易制造、成本低,变刚度效果显著的优势,响应速度快。同时,编织纤维束14可用于直接驱动软体机械臂1,编织纤维束14也是实现变刚度的基础,即软体机械臂1的驱动与变刚度采用了同一介质编织纤维束14,实现了驱动变刚度一体化。另外,此方法能够提高集成度,可有效降低软体机器人体积和质量,提高驱动效率。
技术特征:
1.一种基于编织纤维束的软体机器人,包括柱形软体机械臂(1)、通道(14)、气动接头(4)和编织纤维束(12),所述通道(14)至少设有三个且成周向均匀分布在软体机械臂(1)内形成与通道(14)数量相同的管壁(11),每个管壁(11)的左部与一个编织纤维束(12)的左端固接,通道(14)的左端封闭,通道(14)右端为开口用于供自身内的编织纤维束(12)延伸至软体机械臂(1)的外部,管壁(11)的右端与编织纤维束(12)之间贴合用以减少气体泄漏,每个通道(14)连通有独立的气动接头(4),所述气动接头(4)设置在软体机械臂(1)周向的外壁上。2.根据权利要求1所述的软体机器人,所述软体机械臂(1)采用具有化学惰性且能够拉伸的硅橡胶材料用以使软体机械臂(1)实现360
°
转向或伸缩。3.根据权利要求1所述的软体机器人,所述软体机械臂(1)的左端嵌入有金属片(13),所述金属片(13)上设有与通道(14)数量和位置对应的圆孔,圆孔直径等于或大于编织纤维束(12)的直径,编织纤维束(12)通过结绳与金属片(13)连接实现固定。4.根据权利要求1所述的软体机器人,所述管壁(11)的右端设有瓣膜结构用于与编织纤维束(12)贴合。5.根据权利要求1所述的软体机器人,所述通道(14)设有三个。6.根据权利要求1至5任意一项所述的软体机器人,每个编织纤维束(12)延伸至软体机械臂(1)外部的部分与一个直线电机(3)输出轴固接。7.根据权利要求6所述的软体机器人,还包括与气动接头(4)连通的真空泵(5),所述真空泵(5)能够向任意一或多个通道(14)内进行抽气。8.根据权利要求7所述的软体机器人,所述真空泵(5)设置的数量与通道(14)相同,气动接头(4)通过硅胶管(2)与真空泵(5)一一连通。9.根据权利要求7所述的软体机器人,所述真空泵(5)设有一个,真空泵(5)与硅胶管(2)的一端连通,该硅胶管(2)的另一端连通一个四通的气动接头(4),所述四通的气动接头(4)与软体机械臂(1)上的三个气动接头(4)通过其他硅胶管(2)一一连通。10.一种根据权利要求7至9任意一项所述的软体机器人的驱动方法,该方法包括以下步骤:s1:通过直线电机(3)对与自身连接的编织纤维束(12)独立施加位移,实现软体机械臂(1)定向弯曲或伸缩;s2:当软体机械臂(1)到达指定位置时,通过真空泵(5)对通道(14)进行抽真空操作,编织纤维束(12)内部及自身与管壁(11)之间摩擦显著增加,呈现阻塞干扰状态,实现对软体机械臂(1)预定动作的定形与保持。
技术总结
本发明涉及机器人技术领域,更具体的说是一种基于编织纤维束的软体机器人及其驱动方法。所述软体机器人,包括软体机械臂,以及内置的通道,以及通道内的编织纤维束,软体机械臂能够真空调节,编织纤维束通过独立的直线电机驱动。所述方法包括以下步骤:S1:通过直线电机对与自身连接的编织纤维束独立施加位移,实现软体机械臂定向弯曲或伸缩;S2:当软体机械臂到达指定位置时,通过真空泵对通道进行真空操作,编织纤维束内部及自身与管壁之间摩擦显著增加,呈现阻塞干扰状态,实现对软体机械臂预定动作的定形与保持。该方法使软体机器人响应速度快,变刚度效果显著。变刚度效果显著。变刚度效果显著。
技术研发人员:李隆球 张永昌 李朋春 权家乐 刘家豪 郑杰
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.01.21
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。