1.本发明属于仿人机器人领域,更具体地,涉及一种三自由度假肢手腕。
背景技术:
2.为了使假肢手腕更好地贴合假肢手的设计需求,理想的假肢手腕应能高效地复现人手手腕功能,具有友好的穿戴舒适性。为了实现这一目的,假肢手腕应结构紧凑、重量轻,能够独立地实现三种自由度的运动。
3.人手手腕能实现旋前旋后运动、外展内收运动和屈腕伸腕运动,若要让假肢手腕能主动地实现这三种运动,一般需要三个驱动电机,再配合对应的三个传动系统,整体机构体型较大、重量较重,不利于人的正常穿戴。为了解决这一问题,大多数假肢手腕的设计选择舍弃重要性较低的外展内收运动,只有两个自由度,虽然简化了结构,但操作灵活度也随之降低。因此,假肢手腕的设计需要在运动自由度与结构复杂度之间的权衡做出进一步完善。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供了一种三自由度假肢手腕,其目的在于,实现假肢手腕三自由度运动,在保留假肢手腕的运动灵活性的同时,机构不过于复杂。
5.为实现上述目的,本发明提出了一种三自由度假肢手腕,包括旋前旋后单元、屈腕伸腕单元和外展内收单元,其中:
6.所述旋前旋后单元包括依次连接的减速电机、腕臂连接件和手腕基座,所述减速电机通过腕臂连接件带动所述手腕基座旋转;
7.所述屈腕伸腕单元包括蜗杆驱动组件、蜗轮轴和腕掌连接件,其中,所述蜗杆驱动组件安装在所述手腕基座上,并用于驱动所述蜗轮轴旋转;所述蜗轮轴两端固定在所述腕掌连接件上;
8.所述外展内收单元包括丝杆、光杆和手掌连接件,其中,所述丝杆活动安装在所述腕掌连接件上,该丝杆上固定有第二齿轮,该第二齿轮与第一齿轮啮合,所述第一齿轮安装在所述手腕基座上;所述丝杆上啮合有丝杆螺母,所述光杆上活动套设有丝杆螺母滑块,该丝杆螺母滑块两侧分别固定在所述丝杆螺母和所述手掌连接件上;所述手掌连接件活动安装在所述腕掌连接件上。
9.作为进一步优选的,所述蜗杆驱动组件包括驱动电机、第三齿轮、第四齿轮和蜗杆轴,其中,所述驱动电机用于驱动所述第三齿轮转动,所述第三齿轮与所述第四齿轮啮合,所述第四齿轮套固在所述蜗杆轴上;所述蜗杆轴上套固有蜗杆,该蜗杆与套固在所述蜗轮轴上的蜗轮啮合。
10.作为进一步优选的,所述驱动电机被电机压板固定在所述手腕基座侧面。
11.作为进一步优选的,所述蜗杆轴两端通过轴承安装在所述手腕基座上,并通过依
次套设在蜗杆轴上的轴套和轴承止推环进行轴向定位。
12.作为进一步优选的,所述蜗轮轴两端通过轴承安装在所述手腕基座上,并通过套设在蜗轮轴两侧的垫片进行轴向定位。
13.作为进一步优选的,所述丝杆一端套接有转把,该转把与所述第二齿轮固定;所述转把可轴向抽出,使所述第二齿轮与所述第一齿轮不再啮合,进而通过转把为所述丝杆提供驱动力。
14.作为进一步优选的,所述丝杆上安装有丝杆螺母压板,该丝杆螺母压板用于固定所述丝杆螺母和丝杆螺母滑块;所述光杆固连在所述腕掌连接件上。
15.作为进一步优选的,所述减速电机和所述手掌连接件上均设置有螺纹孔,分别用于与外部假肢手臂筒和假肢手连接装配。
16.总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
17.1.本发明通过在丝杆和手腕基座上设置啮合的齿轮,使得三自由度假肢手腕在屈腕伸腕运动与外展内收运动具有的一定协同性,对旋前旋后运动和屈腕伸腕运动施加主动驱动,对外展内收运动施加驱动或与屈腕伸腕运动的从动,既保留了假肢手腕的运动灵活性,实现假肢手腕三自由度运动,也不致使机构过于复杂。
18.2.本发明的三自由度假肢手腕选用齿轮机构和蜗轮蜗杆机构,传动系统有较大的减速比,能为屈腕伸腕运动提供较大的转矩。
19.3.本发明的三自由度假肢手腕的传动选用了丝杆螺母和蜗轮蜗杆,其具有一定的自锁能力,能实际工作时以固定的状态维持不动。
20.4.本发明的三自由度假肢手腕结构紧凑,体积小巧,在与假肢手和假肢手臂筒装配时,假肢手腕的大部分结构可以容纳在假肢手臂筒内部,大幅降低假肢手腕的空间占用。
附图说明
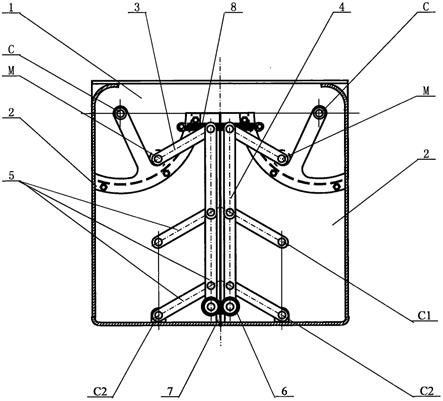
21.图1为本发明实施例三自由度假肢手腕整体结构示意图;
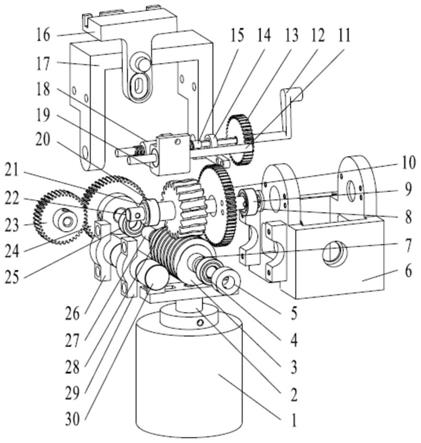
22.图2为本发明实施例三自由度假肢手腕的分解示意图;
23.图3为本发明实施例三自由度假肢手腕旋前旋后运动示意图;
24.图4为本发明实施例三自由度假肢手腕屈腕伸腕运动示意图;
25.图5为本发明实施例三自由度假肢手腕外展内收运动示意图。
26.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:1-减速电机,2-腕臂连接件,3-蜗杆,4-第一轴承,5-轴承止推环,6-手腕基座,7-轴套,8-第一垫片,9-第二轴承,10-第一齿轮,11-光杆,12-转把,13-第二齿轮,14-丝杆螺母压板,15-丝杆,16-手掌连接件,17-腕掌连接件,18-丝杆螺母,19-丝杆螺母滑块,20-第三轴承,21-第二垫片,22-蜗轮轴,23-第三齿轮,24-第四齿轮,25-第四轴承,26-第一电机压板,27-蜗杆轴,28-蜗轮,29-第二电机压板,30-驱动电机。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并
不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
28.本发明实施例提供的一种三自由度假肢手腕,如图1和图2所示,包括旋前旋后单元、屈腕伸腕单元和外展内收单元,其中:
29.所述旋前旋后单元包括依次连接的减速电机1、腕臂连接件2和手腕基座6,所述减速电机1通过腕臂连接件2带动所述手腕基座6旋转,实现旋前旋后运动的传动。
30.所述屈腕伸腕单元包括驱动电机30、第三齿轮23、第四齿轮24、蜗杆轴27、蜗轮轴22和腕掌连接件17,其中,驱动电机30上套固有第三齿轮23,第三齿轮23与第四齿轮24啮合,第四齿轮24套固在蜗杆轴27上,蜗杆轴27上套固有蜗杆3,蜗杆3与蜗轮28啮合,蜗轮28套固在蜗轮轴22上,蜗轮轴22上套固有腕掌连接件17,实现屈腕伸腕运动的传动。
31.具体的,第一电机压板26和第二电机压板29将驱动电机30固定在手腕基座6的侧面;轴承止推环5和轴套7套固在蜗杆轴27上进行轴向定位,第一轴承4和第四轴承25连接蜗杆轴27和手腕基座6;第二轴承9和第三轴承20连接蜗轮轴22和手腕基座6,第一垫片8和第二垫片21套固在蜗轮轴22上进行轴向定位,实现屈腕伸腕运动的固定配合。
32.所述外展内收单元包括丝杆15、光杆11、手掌连接件16和转把12,其中,转把12与第二齿轮13固定,转把12套接在丝杆15上,实现外展内收运动的驱动;丝杆15与丝杆螺母18啮合,丝杆螺母滑块19与手掌连接件16相连,手掌连接件16与腕掌连接件17相连,第一齿轮10与第二齿轮13啮合,实现外展内收运动的传动。
33.具体的,丝杆螺母滑块19套在光杆11上,丝杆螺母压板14固定丝杆螺母18和丝杆螺母滑块19,光杆11固连在腕掌连接件17上,第一齿轮10与手腕基座6固定,实现外展内收运动的固定装配。
34.进一步的,所述减速电机1和所述手掌连接件16上均设置有螺纹孔,分别用于与外部假肢手臂筒和假肢手连接装配;所述蜗杆3、蜗杆轴27、蜗轮28、蜗轮轴22、第一齿轮10均固定在所述手腕基座6的内部;三自由度假肢手腕的大部分机构可以容纳在假肢手臂筒内部。
35.上述三自由度假肢手腕的工作原理如下:
36.初始状态如图1所示,当减速电机1提供主动的驱动力时,腕臂连接件2相对于减速电机1发生转动,转动轴为减速电机1的输出轴,进而带动手腕基座6转动,实现旋前旋后运动,如图3所示。
37.当驱动电机30提供主动的驱动力时,与驱动电机30固连的第三齿轮23发生正转,与第三齿轮23啮合的第四齿轮24发生反转,与第四齿轮24固连的蜗杆轴27发生转动,带动蜗杆3转动,与蜗杆3啮合的蜗轮28发生转动,带动蜗轮轴22转动,由于蜗轮轴22上套固有腕掌连接件17,腕掌连接件17相对于手腕基座6发生转动,实现屈腕伸腕运动。同时,腕掌连接件17的转动会带动第二齿轮13位置变化,又由于第二齿轮13与第一齿轮10的啮合关系,第二齿轮13相对于腕掌连接件17转动,进而第二齿轮13带动丝杆15相对于腕掌连接件17转动,由于丝杆螺母18与丝杆15啮合且与丝杆螺母滑块19固定,丝杆螺母滑块19相对于光杆11发生轴向滑动,与丝杆螺母滑块19相连的手掌连接件16相对于腕掌连接件17发生转动,转动轴为手掌连接件16与腕掌连接件17的连接轴,实现屈腕伸腕运动和外展内收运动的协同运动,如图4所示。
38.此外,外展内收单元还可以实现单独控制:轴向抽出转把12,此时第一齿轮10与第二齿轮13不再啮合;为转把12提供外部驱动力,与转把12套接的丝杆15发生转动,同样地通过丝杆15、丝杆螺母18、丝杆螺母滑块19、光杆11等地传动,手掌连接件16相对于腕掌连接件17发生转动,转动轴为手掌连接件16与腕掌连接件17的连接轴,实现外展内收运动的手动调节,如图5所示。
39.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。