1.本发明属于工业并联平台技术领域,特别涉及一种具有三维移动和一维转动的四自由度并联平台。
背景技术:
2.并联结构的工业平台是近几十年出现的新型工业平台,这种工业平台通常由基座、运动平台和以并联方式连接两者的多条运动分支组成,其驱动部件可以安装在基座上或基座附近,使它与串联结构的工业平台相比具有一些独特的性能,如刚度大、对称性好、结构紧凑和动力学性能好等。stewart平台是最典型的六自由度并联平台,这种平台由运动平台、基座和连接两者的六条可伸缩运动支链组成,通过六个运动支链的伸缩运动使运动平台实现任意位置与姿态的六维空间运动,该种平台亦即具有六个自由度。但是,现代生产中的许多实际工业操作平台只需要具有部分自由度,如具有四自由度的操作平台,四自由度的操作平台包括:三维移动加一维转动、二维移动加二维转动、一维移动加三维转动等,其中,三维移动加一维转动又包括:三维移动加一维水平轴转动和三维移动加一维垂直轴转动。但在少自由度并联机器人中,具有三维移动加一维水平轴转动且具有实用性的四自由度并联平台还并不多见。
技术实现要素:
3.针对以上情况,本发明提供了一种具有三维移动和一维转动的四自由度并联平台,具有工作空间大、承载能力强、精度高和工艺性好的优点,可应用于木工家具、汽车、电子、核工业、航空航天等现代工业领域,同时还适合与焊接和机工机器人联动,有利于大型复杂零件的多工位焊接与加工。
4.本发明采用的技术方案是一种具有三维移动和一维转动的四自由度并联平台,其包括底座、第一运动分支、第二运动分支、第三运动分支、第四运动分支和运动平台,所述底座的第一端和第二端对称设有底座安装板,且所述第一运动分支、第二运动分支、第三运动分支和第四运动分支均通过所述底座安装板设于所述底座上且位于所述底座和运动平台之间,所述第一运动分支、第二运动分支、第三运动分支和第四运动分支均包括竖板、第一h形连杆、第二h形连杆、连接杆、直线驱动器活塞杆、直线驱动器套筒、下h形连杆、上连杆、上h形连杆、下连杆、第一转动轴、第二转动轴、第三转动轴、第四转动轴、第五转动轴、第六转动轴、第七转动轴、第八转动轴、第九转动轴和第十转动轴,所述竖板设于所述底座安装板上,且所述第一h形连杆的第一端通过所述第七转动轴与所述竖板的中部转动连接,所述第一h形连杆的第二端通过所述第八转动轴与所述连接杆的第一端转动连接,且所述连接杆的第二端通过所述第九转动轴与所述第二h形连杆的第一端转动连接,所述第二h形连杆的第二端通过所述第十转动轴与所述竖板的上端转动连接,所述直线驱动器套筒的第一端与所述第十转动轴的中间部转动连接,所述直线驱动器活塞杆的第一端与所述第八转动轴的中间部转动连接,且所述直线驱动器活塞杆的第二端滑动设于所述直线驱动器套筒的第二
端,所述下连杆的中间部通过所述第六转动轴与所述连接杆的中间部转动连接,且所述下连杆的第一端通过所述第一转动轴与所述下h形连杆的第一端转动连接,所述下h形连杆的第二端通过所述第二转动轴与所述上连杆的第一端转动连接,且所述上连杆的第二端通过所述第三转动轴与所述上h形连杆的第一端转动连接,所述上h形连杆的第二端通过所述第四转动轴与所述下连杆的第二端转动连接,且所述上连杆的中间部通过所述第五转动轴与所述运动平台转动连接。
5.进一步地,所述第一运动分支、第二运动分支、第三运动分支和第四运动分支均朝向所述运动平台布置,且所述第一运动分支的第五转动轴轴线与所述第四运动分支的第五转动轴轴线共线,所述第二运动分支的第五转动轴轴线与所述第三运动分支的第五转动轴轴线共线,且所述第一运动分支、第二运动分支、第三运动分支和第四运动分支的第五转动轴轴线均相互平行,所述第一运动分支的第七转动轴轴线与所述第二运动分支的第七转动轴轴线共线,所述第三运动分支的第七转动轴轴线与所述第四运动分支的第七转动轴轴线共线,且所述第一运动分支、第二运动分支、第三运动分支和第四运动分支的第七转动轴轴线均相互平行。
6.优选地,所述第一转动轴的轴线、第二转动轴的轴线、第三转动轴的轴线以及所述第四转动轴的轴线相互平行,所述第五转动轴的轴线与所述第六转动轴的轴线相互平行,且所述第六转动轴的轴线与所述第一转动轴的轴线相互垂直,所述第七转动轴的轴线、第八转动轴的轴线、第九转动轴的轴线以及所述第十转动轴的轴线相互平行。
7.优选地,所述第一转动轴轴线到所述第二转动轴轴线间的垂直距离与所述第三转动轴轴线到所述第四转动轴轴线间的垂直距离相等,所述第一转动轴轴线到所述第四转动轴轴线间的垂直距离与所述第二转动轴轴线到所述第三转动轴轴线间的垂直距离相等。
8.优选地,所述第七转动轴轴线到所述第八转动轴轴线间的垂直距离与所述第九转动轴轴线到所述第十转动轴轴线间的垂直距离相等,所述第八转动轴轴线到所述第九转动轴轴线间的垂直距离与所述第七转动轴轴线到所述第十转动轴轴线间的垂直距离相等。
9.进一步地,通过设置在所述第一运动分支、第二运动分支、第三运动分支以及所述第四运动分支中直线驱动器的协调驱动,能实现所述运动平台的三维移动和一维转动。
10.本发明的特点和有益效果是:
11.1、本发明提供的一种具有三维移动和一维转动的四自由度并联平台,采用并联机构构型,运动特征明确,具有三维移动和一维转动四个自由度,即空间中的三维移动和绕第五转动轴的一维转动。
12.2、本发明提供的一种具有三维移动和一维转动的四自由度并联平台,具有工作空间大、承载能力强、精度高、工艺性能好且易于安装的优点。
13.3、本发明提供的一种具有三维移动和一维转动的四自由度并联平台,可以应用于木工家具、汽车、电子、核工业、航空航天等现代工业领域,特别适合与焊接和机工机器人联动,有利于大型复杂零件的多工位焊接与加工。
附图说明
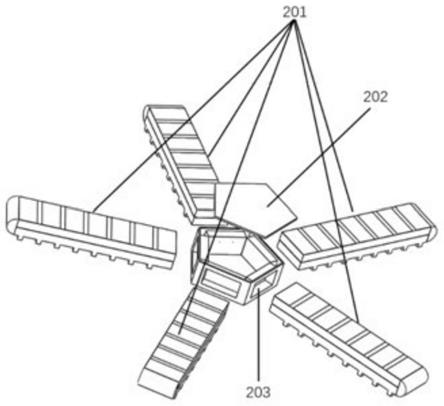
14.图1是本发明的整体结构示意图;
15.图2是本发明的第四运动分支组成示意图;
16.图3是本发明的运动分支连杆连接第一示意图;
17.图4是本发明的运动分支连杆连接第二示意图。
18.主要附图标记:
19.底座1;底座安装板2;第一运动分支3;运动平台4;第二运动分支5;第三运动分支6;第四运动分支7;第一转动轴801;下h形连杆802;第二转动轴803;上连杆804;第五转动轴805;第三转动轴806;上h形连杆807;第四转动轴808;下连杆809;第六转动轴810;竖板901;第七转动轴902;第八转动轴903;第一h形连杆904;连接杆905;直线驱动器活塞杆906;第九转动轴907;第二h形连杆908;第十转动轴909;直线驱动器套筒910。
具体实施方式
20.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
21.本发明提供一种具有三维移动和一维转动的四自由度并联平台,如图1~图4所示,其包括底座1、第一运动分支3、第二运动分支5、第三运动分支6、第四运动分支7和运动平台4,底座1的第一端和第二端对称设有底座安装板2,且第一运动分支3、第二运动分支5、第三运动分支6和第四运动分支7均通过底座安装板2设于底座1上且位于底座1和运动平台4之间,第一运动分支3、第二运动分支5、第三运动分支6和第四运动分支7均包括竖板901、第一h形连杆904、第二h形连杆908、连接杆905、直线驱动器活塞杆906、直线驱动器套筒910、下h形连杆802、上连杆804、上h形连杆807、下连杆809、第一转动轴801、第二转动轴803、第三转动轴806、第四转动轴808、第五转动轴805、第六转动轴810、第七转动轴902、第八转动轴903、第九转动轴907和第十转动轴909,竖板901设于底座安装板2上,且第一h形连杆的904第一端通过第七转动轴902与竖板901的中部转动连接,第一h形连杆904的第二端通过第八转动轴903与连接杆905的第一端转动连接,且连接杆905的第二端通过第九转动轴907与第二h形连杆908的第一端转动连接,第二h形连杆908的第二端通过第十转动轴909与竖板901的上端转动连接,直线驱动器套筒910的第一端与第十转动轴909的中间部转动连接,直线驱动器活塞杆906的第一端与第八转动轴903的中间部转动连接,且直线驱动器活塞杆906的第二端滑动设于直线驱动器套筒910的第二端,其中竖板901、第七转动轴902、第一h形连杆904、第八转动轴903、连接杆905、第九转动轴907、第二h形连杆908及第十转动轴909连接组成平行四边形机构,下连杆809的中间部通过第六转动轴810与连接杆905的中间部转动连接,且下连杆809的第一端通过第一转动轴801与下h形连杆802的第一端转动连接,下h形连杆802的第二端通过第二转动轴803与上连杆804的第一端转动连接,且上连杆804的第二端通过第三转动轴806与上h形连杆807的第一端转动连接,上h形连杆807的第二端通过第四转动轴808与下连杆809的第二端转动连接,且上连杆804的中间部通过第五转动轴805与运动平台4转动连接,其中下h形连杆802、上h形连杆807、上连杆804、下连杆809、第一转动轴801、第二转动轴803、第三转动轴806、第四转动轴808、第五转动轴805及第六转动轴810连接组成平行四边形机构。通过设置在第一运动分支3、第二运动分支5、第三运动分支6以及第四运动分支7中直线驱动器协调驱动,能实现运动平台4的三维移动和一维转动。
22.如图1和图2所示,第一运动分支3、第二运动分支5、第三运动分支6和第四运动分
支7均朝向运动平台4布置,且第一运动分支3的第五转动轴805轴线与第四运动分支7的第五转动轴805轴线共线,第二运动分支5的第五转动轴805轴线与第三运动分支6的第五转动轴805轴线共线,且第一运动分支3、第二运动分支5、第三运动分支6和第四运动分支7的第五转动轴805轴线均相互平行,第一运动分支3的第七转动轴902轴线与第二运动分支5的第七转动轴902轴线共线,第三运动分支6的第七转动轴902轴线与第四运动分支7的第七转动轴902轴线共线,且第一运动分支3、第二运动分支5、第三运动分支6和第四运动分支7的第七转动轴902轴线均相互平行。
23.如图3和图4所示,第一转动轴801的轴线、第二转动轴803的轴线、第三转动轴806的轴线以及第四转动轴808的轴线相互平行,第五转动轴805的轴线与第六转动轴810的轴线相互平行,且第六转动轴810的轴线与第一转动轴801的轴线相互垂直,且第七转动轴902的轴线、第八转动轴903的轴线、第九转动轴907的轴线以及第十转动轴909的轴线相互平行。
24.在一种优选方式中,第一转动轴801轴线到第二转动轴803轴线间的垂直距离与第三转动轴806轴线到第四转动轴808轴线间的垂直距离相等,第一转动轴801轴线到第四转动轴808轴线间的垂直距离与第二转动轴803轴线到第三转动轴806轴线间的垂直距离相等。
25.在一种优选方式中,第七转动轴902轴线到第八转动轴903轴线间的垂直距离与第九转动轴907轴线到第十转动轴909轴线间的垂直距离相等,第八转动轴903轴线到第九转动轴907轴线间的垂直距离与第七转动轴902轴线到第十转动轴909轴线间的垂直距离相等。
26.本发明的具体操作步骤如下:
27.如图1~4所示,本发明的一种具有三维移动和一维转动的四自由度并联平台,其包括底座1、第一运动分支3、第二运动分支5、第三运动分支6、第四运动分支7和运动平台4,底座1的第一端和第二端对称设有底座安装板2,且第一运动分支3、第二运动分支5、第三运动分支6和第四运动分支7均通过底座安装板2设于底座1上且位于底座1和运动平台4之间,通过设置在第一运动分支3、第二运动分支5、第三运动分支6以及第四运动分支7中直线驱动器协调驱动,能实现运动平台4的三维移动和一维转动。
28.在具体工作过程中,可以在运动平台4上可安装工件或夹具,通过设置在第一运动分支3、第二运动分支5、第三运动分支6和第四运动分支7中直线驱动器的协调驱动,能使得并联平台实现在空间中的三维移动和绕第五转动轴805的一维转动。
29.本发明的四个运动分支结构均相同,安装简便,并提高通用性,同时在每个运动分支中均包含两个平行四边形机构,使得机构具有良好的刚度性能,此外直线驱动器设置在每个运动分支内侧,避免了驱动部件容易出现干涉的问题,使得机构结构紧凑,具有工作空间大、精度高、承载能力强等优点,适合与焊接和机工机器人联动,用于大型复杂零件的多工位焊接与加工。
30.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。