1.本发明涉及安防技术领域,尤其涉及一种安防用特种机器人。
背景技术:
2.在地铁站或高铁站中需要安保人员进行实时巡逻,以避免不法分子进行恐怖袭击,或者乘客误带违禁品上车。
3.目前给安保人员配备的设备一般仅为警用钢叉和防暴盾牌等,若遇到突发情况遭遇暴徒且仅用此种装备,则通常需要多名安保人员进行协同配合,若是在某些安保资源较为紧张的区域,单名或少数安保人员几乎无法使用此种装备对暴徒产生威胁,目前市面上的用户安防的特种机器人一般仅有报警示意的功能,其一般无法提升安保人员的战斗力。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种安防用特种机器人。
5.本发明提供如下技术方案:一种安防用特种机器人,包括机体,所述机体的左侧面固设有两个承载板,所述承载板之间转动连接有承载轴,且所述承载轴上固设有限制板,所述机体的下侧面内设有控制槽,所述控制槽的前侧面上上下滑动连接有吸盘板,且所述吸盘板的下侧面上固设有多个吸盘,所述机体内还设有驱动腔,所述驱动腔的上侧面内设有向上贯通的贯通槽,所述机体的上侧面固设有电机,且所述电机的下侧面安装有延伸至所述贯通槽内的主轴,所述驱动腔的下侧面内转动有从轴,所述从轴通过棘盘与所述主轴连接,且所述驱动腔内设有驱动机构,所述从轴转动时能够带动所述承载轴以及所述限制板转动,并且所述驱动机构能够带动所述吸盘板上下运动,从而使所述吸盘贴于地面,以此使得所述机体得到固定,所述机体内设有左右贯通的操作腔,所述操作腔的下侧面固设有支撑架,且所述支撑架的上端连接有手控杆,所述手控杆内设有左右贯通的出液孔,所述机体内还设有储液腔,所述储液腔内能够存储无害的刺激性液体,且所述储液腔的左侧面内设有与所述贯通槽连通的连接孔,所述连接孔内转动连接有驱动轴,且所述驱动轴通过锥齿轮组与所述主轴连接,所述储液腔内设有出液机构,所述驱动轴转动时能够通过所述出液机构使得位于所述储液腔内的液体通过所述出液孔向左喷出。
6.优选的,所述机体的左侧面内设有防爆腔,所述限制板转动至极限处时能够封闭所述防爆腔。
7.优选的,所述限制板的左侧面还固设有配合板,所述配合板呈弯曲状,且所述配合板的前侧面内等角度设有多个弹出槽,所述弹出槽的侧面通过一号弹簧连接有斜面块,且所述配合板的后侧面上固设有一号电磁铁。
8.优选的,所述驱动机构包括设于所述承载板左侧面内的内槽,所述内槽的下侧面内转动连接有延伸至所述驱动腔内的配合轴,所述配合轴的外侧通过轴承连接有转动环,所述转动环的内侧面通过一号卷簧连接于所述配合轴的侧面,且所述承载轴通过同步带与所述转动环连接,所述驱动腔的上侧面内转动连接有延伸至所述控制槽内,并与所述吸盘
板螺纹连接的螺纹轴,所述驱动腔的上侧面固设有固定环,且所述固定环的内侧面通过二号卷簧与所述螺纹轴连接。
9.优选的,所述驱动机构还包括分别设于所述配合轴、所述从轴和所述螺纹轴上的一号齿轮,所述一号齿轮都位于所述驱动腔内,且所述一号齿轮都位于同一前后位置,所述驱动腔的后侧面通过二号弹簧连接有弹簧板,所述弹簧板的前侧面安装有两个二号齿轮,所述二号齿轮能够与所述一号齿轮配合,且位于左侧的所述二号齿轮位于所述一号齿轮的前侧,位于右侧的所述二号齿轮位于所述一号齿轮的后侧,所述驱动腔的后侧面上设有能够排斥所述弹簧板的二号电磁铁。
10.优选的,所述驱动腔的下侧面内设有与所述控制槽连通的连通槽,所述弹簧板的下侧面固设有通过所述连通槽并延伸至所述吸盘板内的推板,所述吸盘板的上侧面内设有多个向下贯通并贯穿所述吸盘的通气孔,所述吸盘板的后侧面内设有与所有所述气孔都连通的滑槽,所述滑槽的前侧面通过三号弹簧连接有封闭板,且所述封闭板抵接于所述推板的前侧面。
11.优选的,所述出液机构包括上下滑动连接于所述储液腔内的活动板,所述活动板的上侧面通过曲柄滑块机构连接于所述驱动轴的左侧面,且所述活动板的下侧面通过波纹管连接于所述储液腔的下侧面,所述活动板内设有上下贯通的一号过液孔,所述一号过液孔内设有向下流通的一号单向阀与瓣膜,所述储液腔的下侧面内设有与所述操作腔连通的二号过液孔,所述一号过液孔和所述二号过液孔都位于所述波纹管内,且所述二号过液孔通过软管连接于所述出液孔内,所述手控杆内设有向左流通的二号单向阀,且所述二号单向阀位于所述手控杆和所述软管连接处的左侧,所述出液孔的下侧面内设有下槽,且所述下槽的下侧面通过四号弹簧连接有封闭塞,所述封闭塞能够延伸至所述手控杆的上侧,且所述封闭塞位于所述软管与所述手控杆连接处的右侧。
12.优选的,所述机体的下侧面内驱动系统,所述驱动系统包括两个能够自驱的驱动轮,以及一个电控的控向轮,所述机体的右侧面安装有扶手,所述限制板的后侧面通过传感器连接有抵接板。
13.本发明提供了一种安防用特种机器人,具有以下有益效果:
14.本发明内设有存储刺激性液体的储液腔,且当需要使用该液体以控制嫌疑人时本发明能够使液体喷出,且液体喷出的角度可控;
15.本发明能够通过限制板以控制嫌疑人的运动,且限制板在转动且接触嫌疑人的过程中为柔性接触,避免嫌疑人受伤;
16.本发明在控制嫌疑人运动后能够通过吸盘固定于地面,以避免嫌疑人带动本发明一起发生运动;
17.本发明内设有防爆腔,且本发明能够通过限制板自动将位于地面上的易爆品转运封闭于防爆腔内。
附图说明
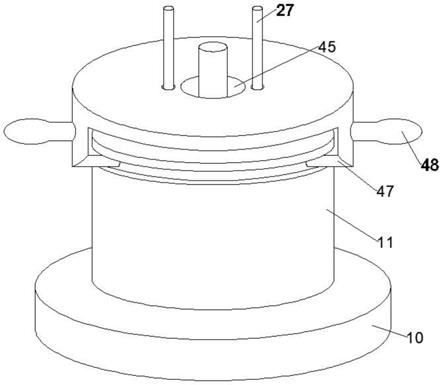
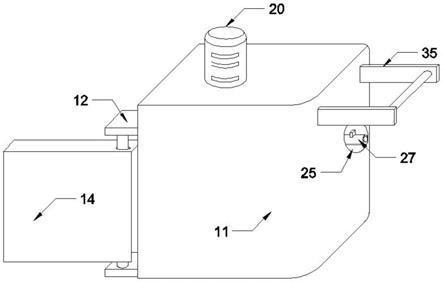
18.图1是本发明的外观示意图;
19.图2是本发明的结构示意图;
20.图3是图2中操作腔处的结构示意图;
21.图4是图3中出液孔处的放大示意图;
22.图5是图2中限制板处的俯视示意图;
23.图6是图2中贯通槽处的放大示意图;
24.图7是图6中驱动腔处的俯视示意图;
25.图8是图2中内槽处的放大示意图;
26.图9是图2中控制槽处的放大示意图;
27.图10是图9中a-a的结构示意图。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.参照图1-图10,根据本发明的实施例的一种安防用特种机器人,包括机体11,所述机体11的左侧面固设有两个承载板12,所述承载板12之间转动连接有承载轴13,且所述承载轴13上固设有限制板14,所述机体11的下侧面内设有控制槽15,所述控制槽15的前侧面上上下滑动连接有吸盘板16,且所述吸盘板16的下侧面上固设有多个吸盘17,所述机体11内还设有驱动腔18,所述驱动腔18的上侧面内设有向上贯通的贯通槽19,所述机体11的上侧面固设有电机20,且所述电机20的下侧面安装有延伸至所述贯通槽19内的主轴21,所述驱动腔18的下侧面内转动有从轴22,所述从轴22通过棘盘23与所述主轴21连接,且所述驱动腔18内设有驱动机构24,所述从轴22转动时能够带动所述承载轴13以及所述限制板14转动,并且所述驱动机构24能够带动所述吸盘板16上下运动,从而使所述吸盘17贴于地面,以此使得所述机体11得到固定,所述机体11内设有左右贯通的操作腔25,所述操作腔25的下侧面固设有支撑架,且所述支撑架的上端连接有手控杆27,所述手控杆27内设有左右贯通的出液孔28,所述机体11内还设有储液腔29,所述储液腔29内能够存储无害的刺激性液体,且所述储液腔29的左侧面内设有与所述贯通槽19连通的连接孔30,所述连接孔30内转动连接有驱动轴31,且所述驱动轴31通过锥齿轮组32与所述主轴21连接,所述储液腔29内设有出液机构33,所述驱动轴31转动时能够通过所述出液机构33使得位于所述储液腔29内的液体通过所述出液孔28向左喷出。
30.在一个优选实施例中,所述机体11的左侧面内设有防爆腔34,所述限制板14转动至极限处时能够封闭所述防爆腔34。
31.在一个优选实施例中,所述限制板14的左侧面还固设有配合板26,所述配合板26呈弯曲状,且所述配合板26的前侧面内等角度设有多个弹出槽36,所述弹出槽36的侧面通过一号弹簧连接有斜面块37,且所述配合板26的后侧面上固设有一号电磁铁38,由于所述斜面块37存在斜面,使得所述斜面块37不会影响所述限制板14朝后转动,但是所述斜面块37的竖直面会抵接于所述限制板14并防止所述限制板14朝前复位,当所述一号电磁铁38通电时能够吸引所有的所述斜面块37,此时所述限制板14不会被所述斜面块37限制转动。
32.在一个优选实施例中,所述驱动机构24包括设于所述承载板12左侧面内的内槽39,所述内槽39的下侧面内转动连接有延伸至所述驱动腔18内的配合轴40,所述配合轴40
的外侧通过轴承连接有转动环41,所述转动环41的内侧面通过一号卷簧42连接于所述配合轴40的侧面,且所述承载轴13通过同步带43与所述转动环41连接,所述驱动腔18的上侧面内转动连接有延伸至所述控制槽15内,并与所述吸盘板16螺纹连接的螺纹轴44,所述驱动腔18的上侧面固设有固定环45,且所述固定环45的内侧面通过二号卷簧46与所述螺纹轴44连接。
33.在一个优选实施例中,所述驱动机构24还包括分别设于所述配合轴40、所述从轴22和所述螺纹轴44上的一号齿轮47,所述一号齿轮47都位于所述驱动腔18内,且所述一号齿轮47都位于同一前后位置,所述驱动腔18的后侧面通过二号弹簧连接有弹簧板48,所述弹簧板48的前侧面安装有两个二号齿轮49,所述二号齿轮49能够与所述一号齿轮47配合,且位于左侧的所述二号齿轮49位于所述一号齿轮47的前侧,位于右侧的所述二号齿轮49位于所述一号齿轮47的后侧,所述驱动腔18的后侧面上设有能够排斥所述弹簧板48的二号电磁铁50,当所述二号电磁铁50处于断电状态时所述二号弹簧会向后拉扯所述弹簧板48并使之位于后极限处,此时位于左侧的所述二号齿轮49与位于左侧和位于中间的所述一号齿轮47啮合,此时所述从轴22的转动仅会通过所述一号齿轮47与所述二号齿轮49带动所述配合轴40转动,所述配合轴40转动时会通过所述一号卷簧42带动所述转动环41转动,且所述转动环41转动时能够带动所述限制板14发生转动,在此过程中所述限制板14若与人体发生碰撞,则会经过所述一号卷簧42的缓冲,当所述二号电磁铁50通电时会使所述弹簧板48运动至前极限处,此时位于右侧的所述二号齿轮49能够与所述位于中间和右侧的所述一号齿轮47啮合,此时所述从轴22的转动仅能带动所述螺纹轴44转动,所述螺纹轴44转动时会使所述二号卷簧46蓄力,并使所述吸盘板16上下运动。
34.在一个优选实施例中,所述驱动腔18的下侧面内设有与所述控制槽15连通的连通槽51,所述弹簧板48的下侧面固设有通过所述连通槽51并延伸至所述吸盘板16内的推板52,所述吸盘板16的上侧面内设有多个向下贯通并贯穿所述吸盘17的通气孔53,所述吸盘板16的后侧面内设有与所有所述气孔53都连通的滑槽54,所述滑槽54的前侧面通过三号弹簧连接有封闭板55,且所述封闭板55抵接于所述推板52的前侧面,当所述二号电磁铁50处于断电状态时所述弹簧板48、所述推板52以及所述封闭板55处于后极限处,此时所述螺纹轴44不会发生转动,且此时所述气孔53不会被所述封闭板55所堵塞,此时所述吸盘17处于失效状态,当所述二号电磁铁50通电时所述弹簧板48以及所述推板52会被推动并向前运动,此时所述封闭板55向前运动且堵塞所述气孔53,此时所述吸盘板16能够在所述吸盘17生效的状态下向下运动。
35.在一个优选实施例中,所述出液机构33包括上下滑动连接于所述储液腔29内的活动板56,所述活动板56的上侧面通过曲柄滑块机构57连接于所述驱动轴31的左侧面,且所述活动板56的下侧面通过波纹管58连接于所述储液腔29的下侧面,所述活动板56内设有上下贯通的一号过液孔,所述一号过液孔内设有向下流通的一号单向阀59与瓣膜,所述储液腔29的下侧面内设有与所述操作腔25连通的二号过液孔,所述一号过液孔和所述二号过液孔都位于所述波纹管58内,且所述二号过液孔通过软管61连接于所述出液孔28内,所述手控杆27内设有向左流通的二号单向阀60,且所述二号单向阀60位于所述手控杆27和所述软管61连接处的左侧,所述出液孔28的下侧面内设有下槽,且所述下槽的下侧面通过四号弹簧连接有封闭塞62,所述封闭塞62能够延伸至所述手控杆27的上侧,且所述封闭塞62位于
所述软管61与所述手控杆27连接处的右侧,当所述主轴21转动时会通过所述锥齿轮组32带动所述驱动轴31转动,所述驱动轴31转动时会通过所述曲柄滑块机构57带动所述活动板56周期性的上下运动,若在此过程中所述封闭塞62被按压并封闭所述出液孔28,则此时所述活动板56向上运动时液体会通过一号过液孔进入所述波纹管58内,当所述活动板56向下运动时波纹管58内的液体会通过所述二号单向阀60并向左喷出,且在此过程中由于所述瓣膜上下两侧的压力差过大,会使得瓣膜打开,若在此过程中所述封闭塞62没有被按压,则所述瓣膜会阻止位于所述储液腔29内的液体流入所述出液孔28内,即此时所述主轴21的转动不会使液体通过所述出液孔28喷出。
36.在一个优选实施例中,所述机体11的下侧面内驱动系统,所述驱动系统包括两个能够自驱的驱动轮,以及一个电控的控向轮,所述机体11的右侧面安装有扶手35,所述限制板14的后侧面通过传感器63连接有抵接板64。
37.本发明的一种安防用特种机器人,其工作流程如下:
38.当需要进行嫌疑人的控制工作时,此时工作人员通过推动扶手35使机体11运动,且在此过程中驱动系统能够辅助机体11进行运动。
39.若要对嫌疑人使用刺激性液体,则工作人员将机体11摆放到位后使电机20通电,电机20通电时会带动主轴21转动,此时主轴21的转向不会通过棘盘23带动从轴22旋转,且主轴21转动时会通过锥齿轮组32带动驱动轴31转动,驱动轴31转动时会使活动板56上下运动,由于此时封闭塞62未被按压,则位于储液腔29内的液体不会喷出,之后工作人员握持手控杆27并调整其角度,当角度调整完成后按压封闭塞62,在封闭塞62按压完成后位于储液腔29内的液体会通过手控杆27向左喷出,并作用于嫌疑人。
40.当需要限制嫌疑人的活动时工作人员推动机体11并使嫌疑人抵接于机体11的左侧面,之后电机20通电并使主轴21反转,主轴21反转时会通过棘盘23带动从轴22转动,且由于此时二号电磁铁50处于断电状态,从轴22的转动会带动限制板14转动,且限制板14在转动过程中能够抵接于斜面块37并被斜面块37限制回弹,在此过程中嫌疑人会被机体11的左侧面,配合板26以及限制板14所限制位置,且在此过程中一号卷簧42能够避免限制板14与嫌疑人发生刚性碰撞,以避免嫌疑人受伤,当传感器63感应到压力达到阈值时,即表明此时此时嫌疑人被完成限制,此时二号电磁铁50通电,二号电磁铁50通电时会使弹簧板48与连通槽51向前运动,且此时从轴22能够带动螺纹轴44旋转,此时吸盘17生效且吸盘板16向下运动,经过一定时间后电机20断电,此时吸盘板16不再运动,此时吸盘17固定于地面以保证机体11难以脱离地面,此时机体11连通嫌疑人都被固定。
41.当嫌疑人需要释放时,此时一号电磁铁38通电,一号电磁铁38通电时会吸引斜面块37并使之不再抵接于限制板14,此时工作人员能够反方向拨动限制板14并携带嫌疑人离开,之后二号电磁铁50断电,二号电磁铁50断电时连通槽51和弹簧板48会向后运动,连通槽51想运动时封闭板55会在四号弹簧的左右下向后运动,且使得气孔53能够流通,此时吸盘17失效且吸盘板16能够脱离地面,之后二号卷簧46能够带动螺纹轴44反转并使吸盘板16向上复位,此时工作人员能够带动机体11运动。
42.当需要进行位于地上的易爆品的转移或引爆工作时,此时工作人员通过驱动系统使机体11运动至易爆品附近,之后在二号电磁铁50处于断电状态下从轴22反转,直至限制板14转动至极限处并抵接于机体11的左侧面,在此过程中位于地面上的易爆品会被限制板
14推动至防爆腔34内且封闭,此时工作人员能够将机体11推动至安全处并处理易爆品。
43.应当理解,上述实施方式仅是示例性的,不用于限制本技术。本领域技术人员可以在本技术的教导下对上述实施方式做出各种变型和改变,而不脱离本技术的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。