1.本发明属于智能扳手技术领域,尤其涉及一种智能组合式手持扳手。
背景技术:
2.扳手是一种常用的安装与拆卸工具,是利用杠杆原理拧转螺栓、螺钉、螺母和其他螺纹紧持螺栓或螺母的开口或套孔固件的手工工具。扳手通常用碳素或合金材料的结构钢制造。
3.扳手通常在柄部的一端或两端制有夹持螺栓或螺母的开口或套孔,使用时沿螺纹旋转方向在柄部施加外力,就能拧转螺栓或螺母。
4.电动扳手是指拧紧和旋松螺栓及螺母的电动工具,是一种拧紧高强度螺栓的工具。用于钢结构桥梁、厂房建筑、化工、发电设备安装大六角头高强度螺栓施工的初拧、终拧和扭剪型高强度螺栓的初拧,以及对螺栓紧固件的扭矩或轴向力有严格要求的场合。
5.目前的手持扳手大多需要根据螺母的规格来手动调节夹持部,随后还需手动旋转扳手才能实现拆卸,而部分电动扳手虽然无需手动旋转扳手进行拆卸,但在固定螺母的时候却需要根据螺母的规格来准备多种不同的固定端,操作十分繁琐,不够智能,自动化程度低。
技术实现要素:
6.本发明实施例的目的在于提供一种智能组合式手持扳手,旨在解决目前的手持扳手大多需要根据螺母的规格来手动调节夹持部,随后还需手动旋转扳手才能实现拆卸,而部分电动扳手虽然无需手动旋转扳手进行拆卸,但在固定螺母的时候却需要根据螺母的规格来准备多种不同的固定端,操作十分繁琐,不够智能,自动化程度低的问题。
7.本发明实施例是这样实现的,一种智能组合式手持扳手,包括:安装块,所述安装块上设有握持把,还包括:
8.套筒,安装在所述安装块一侧,所述套筒一端安装有支筒,所述套筒内部设有自动调节组件,所述自动调节组件上安装有紧固组件,所述紧固组件用于自动对螺母进行多向锁紧;
9.所述自动调节组件用于根据螺母的尺寸来自动控制紧固组件运转。
10.优选地,所述紧固组件包括:
11.安装板,与所述支筒转动连接,所述安装板上开设有导向滑槽,所述导向滑槽内部转动连接有导轮;
12.控制带,套设在所述导轮之间,所述控制带上安装有移动块;
13.导杆,安装在所述移动块上,所述导杆上滑动连接有固定板,所述固定板上开设有交叉槽,所述交叉槽之间相互配合。
14.优选地,所述导向滑槽内部安装有定位杆,所述移动块与所述定位杆滑动连接。
15.优选地,所述自动调节组件包括:
16.操作腔,开设于所述安装块内部,所述操作腔内部滑动连接有第一齿柱,所述第一齿柱之间安装有拉动把,所述握持把与拉动把相互配合;
17.第一齿轮,转动连接在所述操作腔内部,所述第一齿轮与第一齿柱相互啮合;
18.第二齿柱,滑动连接在所述操作腔内部,所述第二齿柱一端转动连接有连接驱动组件,所述连接驱动组件用于通过第二齿柱的升降运转来驱动所述紧固组件运转。
19.优选地,所述第二齿柱一端安装有第一弹簧,所述第一弹簧一端与所述操作腔内壁相连接。
20.优选地,所述连接驱动组件包括:
21.伸缩柱,连接在所述第二齿柱一端,所述伸缩柱内部滑动连接有伸缩杆,所述伸缩柱与伸缩杆一端之间设有第二弹簧;
22.控制套筒,安装在所述伸缩杆一端,且与所述安装板相连接,所述控制套筒内壁上转动连接有第二齿轮,所述伸缩柱侧部安装有齿板,所述齿板与第二齿轮相互配合;
23.调节齿轮,转动连接在所述控制套筒内壁上,所述调节齿轮与所述第二齿轮相互啮合;
24.连动组件,安装在所述控制套筒内部,用于通过所述第二齿轮的旋转来带动所述固定板运动。
25.优选地,所述连动组件包括:
26.第一转盘,安装在所述调节齿轮上,所述控制套筒内部还转动连接有中转盘,所述第一转盘与中转盘之间套设有第一传输带;
27.第二传输带,设于所述中转盘和所述导轮之间。
28.优选地,所述启动组件包括:
29.旋转电机,安装在所述第二齿柱一端,所述旋转电机的输出端与所述伸缩柱相连接;
30.控制钮,安装在所述握持把上,所述控制钮与所述旋转电机电路连接。
31.本发明实施例提供的一种智能组合式手持扳手,具有以下有益效果:
32.在该智能组合式手持扳手使用时,手持握持把,将紧固组件对准螺母,随后手动控制自动调节组件运转,则自动调节组件会驱动紧固组件对螺母进行夹紧,随后再次控制自动调节组件,则自动调节组件会控制紧固组件进行旋转,来带动螺母旋转,实现拆卸螺母的效果,操作简单,且对螺母的适配程度高,使用方便,自动化程度高。
附图说明
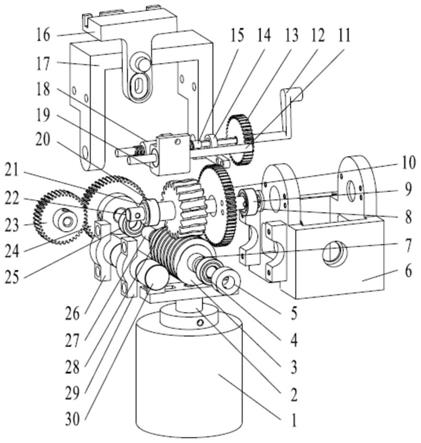
33.图1为本发明实施例提供的一种智能组合式手持扳手的结构示意图;
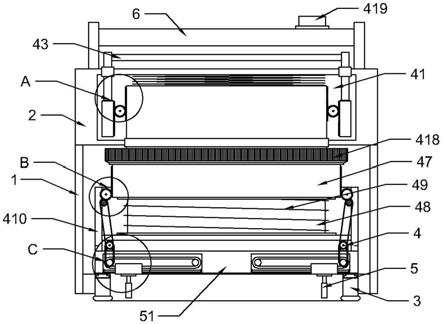
34.图2为本发明实施例提供的一种智能组合式手持扳手中紧固组件的结构示意图;
35.图3为本发明实施例提供的一种智能组合式手持扳手中紧固组件的局部结构示意图;
36.图4为图1中a处的局部放大图;
37.图5为图1中b处的局部放大图;
38.图6为图1中c处的局部放大图;
39.图7为图2中d处的局部放大图。
40.附图中:1-套筒;2-安装块;3-支筒;4-自动调节组件;41-操作腔;42-第一齿柱;43-拉动把;44-第一齿轮;45-第二齿柱;46-第一弹簧;47-伸缩柱;48-伸缩杆;49-第二弹簧;410-控制套筒;411-第二齿轮;412-齿板;413-调节齿轮;414-第一转盘;415-中转盘;416-第一传输带;417-第二传输带;418-旋转电机;419-控制钮;5-紧固组件;51-安装板;52-导向滑槽;53-导轮;54-控制带;55-移动块;56-导杆;57-固定板;58-交叉槽;59-定位杆;6-握持把。
具体实施方式
41.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
42.以下结合具体实施例对本发明的具体实现进行详细描述。
43.如图1所示,在本发明实施例中,一种智能组合式手持扳手,包括:安装块2,所述安装块2上设有握持把6,还包括:
44.套筒1,安装在所述安装块2一侧,所述套筒1一端安装有支筒3,所述套筒3内部设有自动调节组件4,所述自动调节组件4上安装有紧固组件5,所述紧固组件5用于自动对螺母进行多向锁紧;
45.所述自动调节组件4用于根据螺母的尺寸来自动控制紧固组件5运转。
46.在该智能组合式手持扳手使用时,手持握持把6,将紧固组件5对准螺母,随后手动控制自动调节组件4运转,则自动调节组件4会驱动紧固组件5对螺母进行夹紧,随后再次控制自动调节组件4,则自动调节组件4会控制紧固组件5进行旋转,来带动螺母旋转,实现拆卸螺母的效果,操作简单,且对螺母的适配程度高,使用方便,自动化程度高。
47.如图1至图7所示,在本发明实施例中,所述紧固组件5包括:
48.安装板51,与所述支筒3转动连接,所述安装板51上开设有导向滑槽52,所述导向滑槽52内部转动连接有导轮53;
49.控制带54,套设在所述导轮53之间,所述控制带54上安装有移动块55;
50.导杆56,安装在所述移动块55上,所述导杆56上滑动连接有固定板57,所述固定板57上开设有交叉槽58,所述交叉槽58之间相互配合。
51.在本发明实施例中,所述导向滑槽52内部安装有定位杆59,所述移动块55与所述定位杆59滑动连接。
52.使用时,自动调节组件4的运转会带动导轮53旋转,进而驱动控制带54运动,则控制带54会带动移动块55在定位杆59上滑动,直至固定板57与螺母相接触,并对螺母进行夹紧,随后再次操作自动调节组件4运转,则自动调节组件4会驱动固定板57旋转,进而带动螺母进行旋转,以此来控制螺母的拆装工作,且通过控制固定板57的移动,提升了装置的适配性,可以针对各种不同规格的螺母进行适配,适用范围广。
53.如图1至图7所示,在本发明实施例中,所述自动调节组件4包括:
54.操作腔41,开设于所述安装块2内部,所述操作腔41内部滑动连接有第一齿柱42,所述第一齿柱42之间安装有拉动把43,所述握持把6与拉动把43相互配合;
55.第一齿轮44,转动连接在所述操作腔41内部,所述第一齿轮44与第一齿柱42相互
啮合;
56.第二齿柱45,滑动连接在所述操作腔41内部,所述第二齿柱45一端转动连接有连接驱动组件,所述连接驱动组件用于通过第二齿柱45的升降运转来驱动所述紧固组件5运转。
57.在本发明实施例中,所述第二齿柱45一端安装有第一弹簧46,所述第一弹簧46一端与所述操作腔41内壁相连接。
58.如图1至图7所示,在本发明实施例中,所述连接驱动组件包括:
59.伸缩柱47,连接在所述第二齿柱45一端,所述伸缩柱47内部滑动连接有伸缩杆48,所述伸缩柱47与伸缩杆48一端之间设有第二弹簧49;
60.控制套筒410,安装在所述伸缩杆48一端,且与所述安装板51相连接,所述控制套筒410内壁上转动连接有第二齿轮411,所述伸缩柱47侧部安装有齿板412,所述齿板412与第二齿轮411相互配合;
61.调节齿轮413,转动连接在所述控制套筒410内壁上,所述调节齿轮413与所述第二齿轮411相互啮合;
62.连动组件,安装在所述控制套筒410内部,用于通过所述第二齿轮411的旋转来带动所述固定板57运动。
63.如图1至图7所示,在本发明实施例中,所述连动组件包括:
64.第一转盘414,安装在所述调节齿轮413上,所述控制套筒410内部还转动连接有中转盘415,所述第一转盘414与中转盘415之间套设有第一传输带416;
65.第二传输带417,设于所述中转盘415和所述导轮53之间。
66.如图1至图7所示,在本发明实施例中,所述启动组件包括:
67.旋转电机418,安装在所述第二齿柱45一端,所述旋转电机418的输出端与所述伸缩柱47相连接;
68.控制钮419,安装在所述握持把6上,所述控制钮419与所述旋转电机418电路连接。
69.使用时,手持握持把6,并通过手指来控制拉动把43提升,则拉动把43会拉动第一齿柱42上升,并通过第一齿轮44来带动第二齿柱45下降,则第二齿柱45会带动伸缩柱47下移,并利用齿板412来驱动第二齿轮411旋转,随后通过调节齿轮413和第一转盘414之间的连接关系,再利用第一传输带416和中转盘415以及第二传输带417之间的配合关系,带动导轮53旋转,进而驱动固定板57相互靠近,实现对螺母的夹紧效果,待夹紧操作完成后,按下控制钮419,则控制钮419会驱动旋转电机418运转,进而带动控制板57开始旋转,来带动螺母运动,进行安装或拆卸。
70.综上,在该智能组合式手持扳手使用时,手持握持把6,将紧固组件5对准螺母,随后手动控制自动调节组件4运转,则自动调节组件4会驱动紧固组件5对螺母进行夹紧,随后再次控制自动调节组件4,则自动调节组件4会控制紧固组件5进行旋转,来带动螺母旋转,实现拆卸螺母的效果,操作简单,且对螺母的适配程度高,使用方便,自动化程度高。
71.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。