1.本发明属于软体机器人领域,更具体地,涉及一种介电弹性体驱动器、柔性足和仿海星软体机器人。
背景技术:
2.传统由刚性材料构成的机器人通常用于明确定义的环境中,以极高的精度重复地执行规定的动作,这使其在制造业,军事等领域得到了广泛应用。但传统机器人由于其刚性结构,导致其对非结构性环境的适应性差,在复杂环境或狭窄空间内运动会受到限制。
3.软体机器人是指身体结构具有连续软体变形能力的机器人,不同于传统刚性材料和多关节结构的机器人,软体机器人更接近于生物的柔软特性,可以灵活地扭曲变形,理论上具有无限多的自由度。仿照软体动物的生理结构和运动机理,研究其仿生学原理,并据此研制出的具有仿生结构的软体机器人,兼具灵活的运动能力和天然的隐蔽性,对非结构环境具有良好适应性,在资源勘探,军事侦察,抢险救援等领域具有重要而独特的应用价值。软体机器人常见的驱动方式有气动,液压,电场驱动(记忆合金、介电弹性体)等。其中电场驱动的软体机器人因为集成度高、体积小以及可扩展性强等优点,在非结构环境中作业展现出了极大潜能。但是形状记忆合金形变仅受温度影响,由于水的低温及高比热容使形状记忆合金的热量在水中快速扩散,导致其温度不易控制且能量利用率过低。而介电弹性体是一种具有高介电常数的弹性体材料,在高压电场作用下,其形状和体积能发生显著的变化,当电场撤销后可恢复到初始形状和体积,具有响应快,能量效率高,噪声低等优点。介电弹性体可以独立或附加结构,成为软体机器人的驱动器,在软体机器人,特别是水下软体机器人领域得到了广泛的应用。
技术实现要素:
4.针对现有技术的缺陷和改进需求,本发明提供了一种介电弹性体驱动器、柔性足和仿海星软体机器人,其目的在于使得机器人结构简单,能量效率高,对于水底沙石、泥淖等不同地形均有良好的通过能力。
5.为实现上述目的,按照本发明的第一方面,提供了一种介电弹性体驱动器,包括:第一介电弹性体、第二介电弹性体、第一柔性电极第二柔性电极、第三柔性电极、第一导线、第二导线和第三导线;
6.第一介电弹性体和第二介电弹性体上下对齐放置;
7.第一柔性电极贴合于第一介电弹性体的外侧,第二柔性电极贴合于第一介电弹性体与第二介电弹性体之间,第三柔性电极贴合于第二介电弹性体的外侧;
8.第一导线贴附于第一介电弹性体上,一端引出,第二导线贴附于第二介电弹性体上,一端引出,第三导线贴附于第三介电弹性体上,一端引出,第一导线与第三导线的引出端用于连接外部电源的正极,第二导线的引出端用于连接外部电源的负极。
9.优选地,每个柔性电极包括多个柔性电极区域,各柔性电极区域之间间距相等。
10.有益效果:针对现有驱动器连续设计导致的麦克斯韦应力相互影响,伸长长度有限的问题,本发明采用不连续的柔性电极,各柔性电极区域之间间距相等,使得各柔性电极区域张力独立,各柔性电极区域对通电情况下为并联,减少各柔性电极区域之间麦克斯韦应力的影响,伸长的长度至少可达未通电状态下长度的1.3倍。
11.为实现上述目的,按照本发明的第二方面,提供了一种介电弹性体柔性足,包括:如第一方面所述的介电弹性体驱动器和软体足底;
12.所述软体足底一侧与介电弹性体驱动器固定,另一侧表面为凹凸结构。
13.优选地,所述介电弹性体柔性足还包括:软体足端,其位于软体足底的末端。
14.有益效果:软体足端增加了介电弹性体柔性足弯曲时与环境的有效接触面积,摩擦力更大,使仿生机器人爬行过程更稳定。
15.优选地,所述凹凸结构为具有等间距的脊状纹路。
16.有益效果:相对于其他凹凸结构,本发明优选等间距的脊状纹路,提供的摩擦力与柔性足弯曲方向上的摩擦力方向一致,进一步使得仿生机器人爬行过程更稳定。
17.为实现上述目的,按照本发明的第三方面,提供了一种仿海星软体机器人,包括:五条如第二方面所述的介电弹性体柔性足、外壳、电源电路和控制器;
18.所述外壳主体呈正五边形,内部设有空腔,用于封装电源电路和控制器,外部设有五个凹槽,用于固定五条介电弹性体柔性足;
19.所述控制器用于向电源电路发出升压或降压的控制信号;
20.所述电源电路用于根据控制信号驱动介电弹性体柔性足。
21.优选地,所述电源电路由电池和升压模块构成;
22.所述电池输出的电压经过升压模块升压之后,达到介电弹性体能够发生形变的级别。
23.有益效果:相对于成品电源,本发明采用电池和升压模块构成,尺寸更小,重量更轻,仿海星机器人的负载更小,续航时间更长。
24.总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
25.(1)针对现有驱动器麦克斯韦应力不够大的问题,本发明提出一种介电弹性体驱动器,采用双介电弹性体(双电致变形)且共用负极,提供更大的输出力,使得仿生机器人在海底环境的运动更顺畅。
26.(2)本发明提出一种介电弹性体柔性足,通过上侧介电弹性体驱动器(可伸长)与下侧硅胶弹性体足底(可伸缩变形),在介电弹性体驱动器通电时,使得介电弹性体柔性足向下侧弯曲;软体足底表面的凹凸结构,保障柔性足与环境接触的摩擦力。
27.(3)本发明提出一种仿海星软体机器人,采用中心辐射对称结构,符合海星的运动方式,相对于其他机器人结构(例如,仿生鱼),能够适应海底不同的地形;并采用上述介电弹性体柔性足,电致变形,相对于热致变形材料,能量效率更高。
附图说明
28.图1为介电弹性体驱动器的整体拆分图。
29.图2为介电弹性体柔性足整体拆分图。
30.图3为软体机器人结构示意图。
31.图4为外壳主体示意图。
32.图5为外壳上盖示意图。
33.图6为外壳中电源部分和控制部分的分布图。
34.图7为仿海星软体机器人运动周期过程的状态示意图,其中,上半部分为俯视图,下半部分为正视图。
具体实施方式
35.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
36.如图1所示,本发明提供一种介电弹性体驱动器,包括:两条介电弹性体薄膜(902、904,形状和尺寸均相同)、三组碳膏柔性电极(901、903、905)和三条铜导线(906、907、908)。
37.介电弹性体薄膜为矩形,长为51mm,宽为12mm,高为2mm。
38.一组碳膏柔性电极由七个碳膏柔性电极区域组成,图1中黑色部分为柔性电极区域,各柔性电极区域间有间距,使得介电弹性体驱动器各柔性电极区域张力独立,互不影响。单个碳膏柔性电极区域长为6mm,宽为12mm,碳膏柔性电极区域间距为1.5mm。
39.介电弹性体薄膜902位于介电弹性体薄膜904上方。
40.碳膏柔性电极901被等距地涂抹(固化)在介电弹性体薄膜902上表面,碳膏柔性电极903位于介电弹性体薄膜902与介电弹性体薄膜904之间,碳膏柔性电极903被等距地涂抹在介电弹性体902下表面,碳膏柔性电极905被等距地涂抹在介电弹性体904下表面。
41.铜导线906附于介电弹性体902上表面,并将碳膏柔性电极901的各柔性电极区域并联连接;铜导线907附于介电弹性体902下表面,并将碳膏柔性电极903的各柔性电极区域并联连接;铜导线908附于介电弹性体902下表面,并将碳膏柔性电极903的各柔性电极区域并联连接。
42.铜导线906、907、908的一端引出,其中,铜导线906与铜导线908用于连接至外部电源的正极,铜导线907用于连接至外部电源的负极。
43.如图2所示,本发明提供了一种介电弹性体柔性足,所述介电弹性体柔性足包括:上述介电弹性体驱动器501、硅胶弹性体足底502和硅胶弹性体足端503。
44.所述硅胶弹性体足底形状为矩形长条状,上表面平整,长为51mm,宽为12mm,高为4mm,下表面具有等间距的脊状纹路,脊状纹路长为1.5mm,宽为12mm,高为1mm,脊状纹路间距为4.5mm,脊状纹路用于增加介电弹性体柔性足与环境的摩擦力。
45.硅胶弹性体503足端呈半圆柱形,半径为3mm,宽为12mm。
46.介电弹性体驱动器与硅胶弹性体足底呈上下排列。
47.介电弹性体驱动器501位于硅胶弹性体足底502上方,介电弹性体驱动器501下表面与硅胶弹性体足底502的上表面贴合。
48.硅胶弹性体足端503位于介电弹性体柔性足的末端,用于增加介电弹性体柔性足弯曲时与环境的接触面积。
49.工作时,外部电源通过铜导线向介电弹性体驱动器施加电压,可使介电弹性体驱
动器在麦克斯韦应力的作用下表面积增加,长度变长。硅胶弹性体足底不会主动发生变形,能够引导介电弹性体驱动器在通电伸长时向下方弯曲,从而使介电弹性体柔性足整体伸长并向下方弯曲。将电压撤销后,介电弹性体柔性足恢复原长。
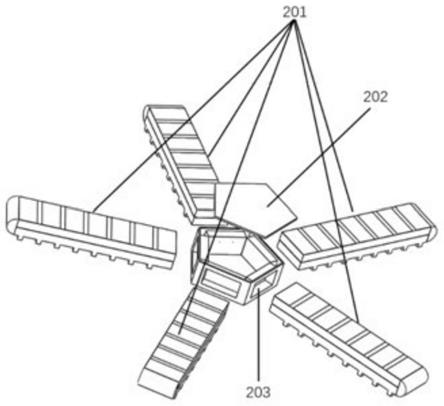
50.如图3所示,本发明提供了一种仿海星软体机器人,包括:五条上述介电弹性体柔性足201、外壳主体203、外壳上盖202、低压电源(本实施例中为锂电池)、升压电路、微控制器及其配套电路。
51.外壳上盖202位于外壳主体203上方,与外壳主体贴合构成完整外壳,保证外壳整体密封性。
52.五条介电弹性体柔性足201分别与外壳主体203的五个凹槽连接,其中,五条介电弹性体柔性足的铜导线通过外壳主体凹槽的小孔302接入外壳主体内部的升压模块的电压输出端,介电弹性体柔性足末端平面与外壳主体203的凹槽301的底部平面贴合。
53.如图4所示,外壳主体呈正五边形,内部有空腔303,用于固定与容纳电源部分和控制部分;外壳主体外侧有五个凹槽301,用于固定五条介电弹性体柔性足。凹槽底部中心有两个小孔302,用于将介电弹性体柔性足的铜导线接入外壳内部升压模块。
54.外壳主体边长为18mm,高为9mm,凹槽高为6mm,宽为12mm,深为5mm,小孔直径为0.3mm,两小孔间距为6mm。
55.外壳上盖如图5所示,形状与外壳主体相同为正五边形。外壳上盖边长为18mm,高为2mm。
56.微控制器及其配套电路702,低压电源701与升压模块703在外壳主体中的排布如图6所示。升压模块703输入端与低压电源701输出端连接,用于将低压电源输出的电压升高至驱动介电弹性体驱动器所需的电压(本实施例中为400v-500v);升压模块的输出端通过铜导线与介电弹性体柔性足的柔性电极相连;升压模块的控制端与控制部分连接,根据需要向介电弹性体柔性足输出电压。
57.控制部分由微控制器及其配套电路构成。首先,基于模型预测控制方法进行实时步态规划。进一步地,升压模块根据步态规划结果对五条介电弹性体柔性足的电压进行升压或降压控制,从而控制仿海星软体机器人呈现相应的爬行步态。
58.本发明中的仿海星软体机器人的向前爬行过程主要分为以下七个状态:如图7状态1所示,初始状态下,软体机器人的两条介电弹性体柔性足1、2面向前进方向,三条介电弹性体柔性足3、4、5背向前进方向,所有介电弹性体柔性足均未通电,软体机器人处于移动准备状态。如图7状态2所示,当为介电弹性体柔性足1、2加高电压,柔性足上的介电弹性体在麦克斯韦应力的作用下表面积增加,并向一侧弯曲,有一个微小的向前爬行。如图7状态3所示,为介电弹性体柔性足1、2、3、5加高电压,介电弹性体柔性足1、2、3、5均处于弯曲状态,形成明显的向前趋势。如图7状态4所示,为介电弹性体柔性足1、2、3、4、5加高电压,所有介电弹性体柔性足均处于弯曲状态,仿海星软体机器人处于站立状态。如图7状态5所示,为介电弹性体柔性足3、4、5加高电压,撤销介电弹性体柔性足1、2的高电压,介电弹性体柔性足1、2由弯曲转为伸展,仿海星软体机器人大部前移。如图状态6所示,为介电弹性体柔性足4加高电压,撤销介电弹性体柔性足3、5的高电压,介电弹性体柔性足3、5由弯曲转为伸展,仿海星软体机器人持续向前移动。如图7状态7所示,撤销介电弹性体柔性足4的高电压,介电弹性体柔性足4由弯曲转为伸展,海星回到初始状态,完成一个完整周期的运动。通过重复上述
过程使机器人可以模仿海星爬行的方式向前爬行。
59.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。