1.本发明涉及机器人技术领域,更具体的说是一种基于磁流变液的软体机器人及其驱动方法。
背景技术:
2.软体机器人因其多自由度、高柔顺性和高鲁棒性在工业生产、医疗康复、服务、探测等领域展现出广阔的应用前景。然而,由于目前的软体机器人的基质材料以软材料为主,这导致软体机器人理论上具有无限自由度,输出位移和输出力都难以精确控制。
3.具有主动控制刚度的结构允许软机器与其环境之间进行多功能交互。一方面,高刚度使机器人的高精度、大速度和高作用力的同时输出成为可能。另一方面,在低刚度的情况下,机器人可实现高度一致性、适应性和安全的交互。因此,可变刚度结构对拓宽软体机器人交互应用场景具有重要价值。
技术实现要素:
4.本发明提供一种基于磁流变液的软体机器人及其驱动方法,目的是可以实现软体机器人的变刚度。
5.上述目的通过以下技术方案来实现:
6.一种基于磁流变液的软体机器人,包括一端封闭的软体机械臂,所述软体机械臂包括自身内设置的至少三个成周向均匀分布的流道以形成与流道数量相同的壁面结构,所述流道内填充有磁流变液;以及与流道连通以向其内填充磁流变液的供液机构。
7.所述供液机构包括与流道数量相同且一一对应连通的硅胶管,以及控制硅胶管导通或关闭的电磁阀,以及与电磁阀连接用以对流道内磁流变液施加不同的压强液压缸,以及与液压缸连接用于输送磁流变液的液压泵。
8.上述基于磁流变液的软体机器人的驱动方法,包括以下步骤:
9.s1:未施加外部磁场作用下,通过对处于不同流道内的磁流变液分别独立施加压力,实现软体机械臂定向弯曲或伸缩;
10.s2:当软体机械臂到达指定位置时,施加外部磁场,受磁场影响的磁流变液刚度增大,实现对软体机械臂预定动作的定形与保持。
附图说明
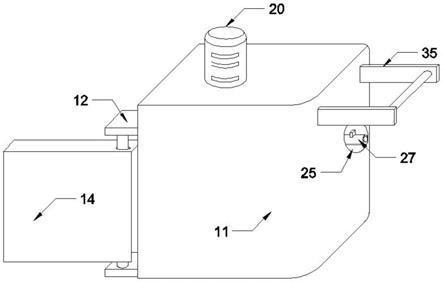
11.图1为本发明一种基于磁流变液的软体机器人整体结构在未驱动状态下的三维结构示意图;
12.图2显示了本发明的软体机器人在未驱动状态下主体结构剖视图;
13.图3是图2中a的局部结构放大示意图;
14.图4为本发明的软体机器人结构的另一视角剖视图。
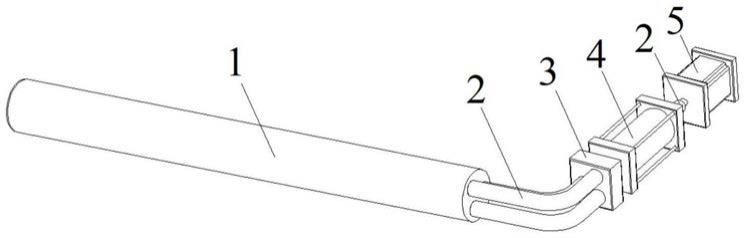
具体实施方式
15.一种基于磁流变液的软体机器人,包括软体机械臂1和供液机构;
16.其中,如图1至4所示,软体机械臂1包括硅橡胶主体11、流道12、磁流变液13和编织纤维网14,其中所述硅橡胶主体11内设有至少三个流道12以形成与流道12数量相同的壁面结构,所述壁面结构包括硅橡胶栅格管壁121和硅橡胶光滑管壁122;优选的,在制造过程中硅橡胶主体11、硅橡胶栅格管壁121和硅橡胶光滑管壁122一体成型;
17.其中,如图1所示,供液机构包括硅胶管2、电磁阀3、液压缸4和液压泵5;
18.具体的,软体机械臂1在未驱动状态下优选呈圆柱状,软体机械臂1所包括的流道12数量优选为三个;三个流道12周向均匀布置在硅橡胶主体11内,三个流道12与一个虚拟的圆内切,所述虚拟的圆的圆心与硅橡胶主体11的轴线重合;在硅橡胶主体11的左端封闭,硅橡胶主体11内的壁面结构的左端部分为栅格状管壁121,其余部分为与栅格状管壁121衔接的光滑管壁122,流道12内充满磁流变液13,软体机械臂1主体外层即硅橡胶主体11内嵌一层编织纤维网14,可防止液压驱动时软体机械臂1径向过度膨胀,硅橡胶主体11由化学惰性的高拉伸强度硅橡胶材料制得;其中栅格状管壁121目的是增大流道12靠近软体机械臂1轴线方向的刚度,该结构可以通过增多硅橡胶体积实现,也可以采用其他形状,流道12靠近软体机械臂1轴线侧和软体机械臂1轴线侧的刚度差异更大,在相同的流道驱动压力下,会产生更大的弯曲角度,或者说驱动效果得到提升。
19.具体的,所述供液机构包括与流道12数量相同且一一对应连通的硅胶管2,以及控制硅胶管2导通或关闭的电磁阀3,以及与电磁阀3连接用以对流道12内磁流变液13施加不同的压强液压缸4,以及与液压缸4连接用于输送磁流变液13的液压泵5。
20.进一步的,软体机械臂1采用磁流变液13作为驱动介质,磁流变液13经液压泵5、液压缸4、电磁阀3和硅胶管2填充满软体机器人内置流道12,在未施加磁场的情况下,通过液压缸5对软体机器人内置流道12内磁流变液13施加不同的压强,软体机械臂1前端可实现360
°
灵活转向;
21.当在施加外界磁场的情况下,软体机械臂1内置流道12内磁流变液13由牛顿流体转变为高粘度、低流动性、高刚度的宾汉流体,实现由低刚度向高刚度的转变,软体机械臂1所处的变形状态得到保持,在这种状态下,由于软体机械臂1刚度增大,其前端承载力显著增大,本申请具有能耗低、易控制和响应快的优点。实现了软体机械臂1的驱动和变刚度共用同一介质即磁流变液13,实现了软体机械臂1的驱动与变刚度一体化,磁流变液13化学稳定性好、成本低且易于制备;另外,此方法能够提高集成度,有利于降低软体机器人的体积与质量,提高驱动效率。
技术特征:
1.一种基于磁流变液的软体机器人,包括一端封闭的软体机械臂(1),所述软体机械臂(1)包括自身内设置的至少三个成周向均匀分布的流道(12)以形成与流道(12)数量相同的壁面结构,所述流道(12)内填充有磁流变液(13);以及与流道(12)连通以向其内填充磁流变液(13)的供液机构。2.根据权利要求1所述的基于磁流变液的软体机器人,所述软体机械臂(1)还包括硅橡胶主体(11)用以能够360
°
转向,所述流道(12)位于硅橡胶主体(11)内。3.根据权利要求2所述的基于磁流变液的软体机器人,所述壁面结构包括左端的硅橡胶栅格管壁(121),以及与硅橡胶栅格管壁(121)衔接的硅橡胶光滑管壁(122)。4.根据权利要求2所述的基于磁流变液的软体机器人,所述软体机械臂(1)还包括设置在硅橡胶主体(11)上的编织纤维网(14)。5.根据权利要求4所述的基于磁流变液的软体机器人,所述编织纤维网(14)内嵌于硅橡胶主体(11)。6.根据权利要求1所述的基于磁流变液的软体机器人,所述软体机械臂(1)采用外层内嵌螺旋导线的方式产生磁场,或采用外置磁场发生设备的方式产生磁场。7.根据权利要求1所述的基于磁流变液的软体机器人,所述流道(12)的数量为3个。8.根据权利要求1至7任意一项所述的基于磁流变液的软体机器人,所述供液机构包括与流道(12)数量相同且一一对应连通的硅胶管(2),以及控制硅胶管(2)导通或关闭的电磁阀(3),以及与电磁阀(3)连接用以对流道(12)内磁流变液(13)施加不同的压强液压缸(4),以及与液压缸(4)连接用于输送磁流变液(13)的液压泵(5)。9.一种根据权利要求8所述的基于磁流变液的软体机器人的驱动方法,其特征在于,包括以下步骤:s1:未施加外部磁场作用下,通过对处于不同流道(12)内的磁流变液(13)分别独立施加压力,实现软体机械臂(1)定向弯曲或伸缩;s2:当软体机械臂(1)到达指定位置时,施加外部磁场,受磁场影响的磁流变液(13)磁流变液刚度增大,实现对软体机械臂(1)预定动作的定形与保持。10.根据权利要求9所述的驱动方法,磁流变液(13)在未施加磁场作用时,磁流变液(13)为的牛顿流体;磁流变液(13)在外加磁场作用下,磁流变液(13)由牛顿流体转变为宾汉流体。
技术总结
本发明涉及机器人技术领域,更具体的说是一种基于磁流变液的软体机器人及其驱动方法。所述基于磁流变液的软体机器人,包括软体机械臂,以及位于软体机械臂内至少三个成周向均匀分布的流道,所述流道内填充有磁流变液;以及填充磁流变液的供液机构。所述驱动方法包括以下步骤:S1:通过对处于不同流道内的磁流变液分别独立施加压力,实现软体机械臂定向弯曲或伸缩;S2:当软体机械臂到达指定位置时,施加外部磁场,受磁场影响的磁流变液刚度增大,实现对软体机械臂预定动作的定形与保持。本申请具有能耗低、易控制、响应快、集成度高和承载力大的优点。的优点。的优点。
技术研发人员:周德开 张永昌 权家乐 李朋春 岳红尔 刘家豪 郑杰
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.01.21
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。