1.本发明涉及一种轨道交通设备,尤其涉及一种轨道车辆分离式新型山地轻轨系统。
背景技术:
2.在目前的轨道交通系统中,广泛地采用了跨坐式单轨交通系统。跨坐式单轨交通系统就是通过单根轨道梁来支承、稳定和导向,车辆骑跨在轨道梁上运行的铁路系统。跨坐式单轨交通系统具有爬坡和曲线通过能力强、占用空间小、噪声和景观影响小、建设周期短、投资成本低等独特特点和诸多优势,因此除了作为中小型城市的主要轨道交通线和连接城市中心与郊区的大城市轨道交通的补充线之外,特别适合风景区和旅游城市的旅游观光线。
3.与普通城市轨道交通相比,跨坐式单轨交通的特殊性主要体现在车辆和轨道梁上。跨坐式单轨车辆采用了独特的骑跨式转向架结构支撑车体在轨道梁上运行,融合了传统城轨铁道车辆和重型汽车的相关技术,具有不同于传统钢轮双轨系统的显著特点。跨坐式单轨轨道梁是承载车辆载荷和运行导向的结构,承受较大的垂向力和扭转载荷,其设计、制作和安装精度要求高,需要具备足够的安全度、可靠性和耐久性。
4.随着人们生活水平的提高,对旅游的需求也呈现出多样性和差异性。相对偏僻的、静谧的,但自然风光秀丽的旅游项目——山地轻轨项目收到越来越多游客的欢迎。山地轻轨项目的突出优点是:
①
将休闲旅游与轨道交通相结合,是轨道交通在旅游业中的延伸,实现了旅游的便捷性,给游客带来实实在在的好处;
②
可全线高架,从而尽可能少地占用土地,实现了对景区生态环境的最大保护。该类项目对车辆和轨道梁的各个方面如轻量化、易维修性、安全性和舒适性等要求将更加严格。
5.现有技术所采用的跨坐式单轨交通系统大同小异,其主要由轨道梁、轨道车辆、供电设备、车辆段等部分组成。轨道梁既是承重的桥梁结构,又是支承和导向的轨道。轨道车辆采用了橡胶轮胎,通过安装在转向架两侧的导向轮和稳定轮来导向和稳定车体。构造上的特点使得其走行机理、轮轨关系等都与常规地铁、轻轨有很大差别。
6.现有技术中,轨道车辆必须在轨道上面运行。轨道车辆的转向架必须实时跨坐在轨道上面,轨道车辆与轨道不可分离。
7.综上所述,现有技术中的轨道具有如下缺点:1》 现有技术安全性低。
8.现有技术中,车辆的转向架跨坐在单轨轨道上,即位于单轨轨道的外侧。车辆转向架的驱动轮、稳定轮和导向轮均压在单轨轨道的外部表面上。当导向轮和稳定轮有了一定的磨损量后,导向轮和稳定轮分别与轨道上侧面和下侧面之间的间隙加大,造车车辆在运行过程中左右摆动,从而降低了车辆运行的安全性;严重的情况下,尤其在山地间运行时且侧向风很大的情况下,车辆有倾覆的危险。
9.2》 现有技术使用范围小。
10.现有技术中,车辆只能在轨道上面运行(即有轨道的地方才有车辆),从而大大限制了车辆的使用范围。
11.3》 现有技术施工难度大,施工成本高。
12.现有技术中,轨道主体材料为混凝土,而混凝土具有典型的时效性,必须在轨道架设现场或附近设置混凝土的搅拌、运输和浇筑设备。这些设备在架设山地轻轨系统时是很困难的,尤其在大坡度(≥200
‰
)、小弯道(≤5m)的风景区施工环境下几乎是不可能的。
13.现有技术主体材料为混凝土,在保证相同强度的条件下,混凝土材质的轨道体积大、重量大,搬运不便;混凝土的搅拌、运输、浇筑、维护需要较多的人力、物力和财力,综合成本高。
14.4》 现有技术供电方式单一,供电系统不可靠。
15.现有技术中,要么采用接触网顶部供电,要么采用轨道滑触线底部供电,供电方式单一。当发生接触网故障或滑触线断电的情况,则车辆将“抛锚”于轨道上,从而给车辆的维护和救援带来困难。
技术实现要素:
16.本发明的目的就在于为了解决上述问题而提供一种轨道车辆分离式新型山地轻轨系统。
17.本发明通过以下技术方案来实现上述目的:本发明由轨道支架、框架式轨道、轨道无人车、电动观光车和双供电系统组成,所述框架式轨道为防侧翻轨道,所述框架式轨道固定设置于所述轨道支架上,所述轨道无人车位于所述框架式轨道内,所述双供电系统设置于所述框架式轨道内,所述双供电系统与所述轨道无人车的供电端连接,所述电动观光车与所述轨道无人车可拆卸连接,所述轨道无人车为能够在所述框架式轨道内自主运行的无人驾驶平板车。
18.进一步,所述轨道支架由横向水平板、横向斜拉板、横向支板、纵向斜拉板、支架螺栓组成,所述横向支板、横向斜拉板和所述横向水平板构成横向支架,所述横向斜拉板和所述横向支板均为两条,两条所述横向支板的下端分别通过支架螺栓固定与所述横向水平板的两端,所述横向斜拉板的下端固定设置于所述横向水平板的中段一侧,所述横向斜拉板和所述横向支板的上端均与所述框架式轨道的下端固定连接,所述框架式轨道下端固定设置多个所述横向支架,相邻两个所述横向支架之间的所述横向支板之间均较差设置两条所述纵向斜拉板。
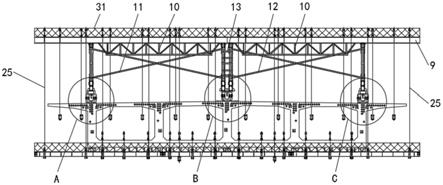
19.进一步,所述框架式轨道由轨道连接法兰、轨道支撑法兰、轨道加强法兰、轨道纵梁、轨道侧板、轨道侧板、轨道底板、侧板螺栓和对接螺杆组成,所述轨道连接法兰设置于所述轨道底板的两端,所述轨道侧板设置于所述轨道底板的两侧,所述轨道侧板通过所述侧板螺杆固定在所述轨道纵梁上,所述轨道侧板和所述轨道底板外设置所述轨道加强法兰和所述轨道支撑法兰,所述轨道支撑法兰与所述轨道支架连接,所述端部侧板固定在所述轨道连接法兰与所述轨道纵梁之间。
20.进一步,所述轨道无人车由车架、内嵌式转向架、连接导向装置、永磁手动连接装置、自动连接固定板、无人驾驶控制器组成,所述车架的下端设置用于框架式轨道内行走的内嵌式转向架,所述车架上端面的前后两端均设置有连接所述电动观光车的连接导向装
置,所述连接导向装置中部的所述车架上设置有永磁手动连接装置,所述车架的侧边设置有用于与电动观光车连接的自动连接固定板,所述车架上还设置有控制所述内嵌式转向架驱动的无人驾驶控制器。
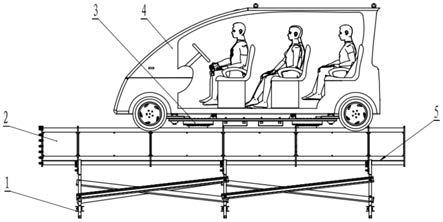
21.进一步,所述电动观光车由电动观光车主体、连接板、电动推杆和顶部的吊环螺钉组成,所述连接板和所述电动推杆固定设置于所述电动观光车主体的底部,所述连接板与所述轨道无人车连接时位于所述连接导向装置中,并与所述永磁手动连接装置磁吸固定,同时,所述电动推杆与所述自动连接固定板扣接,所述吊环螺钉固定设置于所述电动观光车主体的顶部。
22.进一步,所述双供电系统为电池、轨道滑触线和轨道无人车供电系统组成,所述轨道滑触线敷设于所述框架式轨道上,所述电池设置于所述电动观光车上,所述轨道无人车供电系统设置于所述轨道无人车上。
23.该新型轨道可布置在大型、大坡度风景区里面。该新型轨道也可布置在路过风景区的高速公路出口,作为连接高速公路和风景区的连接线路,实现了家庭、高速公路与风景区之间的无缝衔接。在高速公路上行驶的车辆可驶出高速公路后,直接驶入轨道无人车上。该新型轨道无人车为无人驾驶型平板车,运行在新型轨道上。新型轨道无人车上面设置了能够固定电动观光车的连接装置。
24.该新型轨道无人车的转向架采用内嵌式结构,即整个转向架完全嵌入在轨道的内侧,从而从根本上避免了轨道平板车倾覆的可能,提高了安全性能。
25.该新型电动观光车为电池驱动的新能源汽车。底部设置了能够固定在无人车上面的连接装置。该新型电动观光车在公路上运行时,利用自身的一套驱动、转向、制动、控制系统运行。在轨道上运行时,利用底部的连接装置,可完成在轨道无人车上面的的固定、运行和松开等一些列过程。
26.该新型电动观光车顶部设置了救援起吊装置,以方便该新型电动观光车的空中救援。
27.该新型双供电系统为电池、轨道滑触线双源、双作用、互补式供电系统。电池安装在电动观光车上面,以提供公路运行时电动观光车的动力。电动观光车驶入轨道无人车上面后,一方面由电动观光车上面的电池给轨道平板车供电,另一方面由设置在轨道上的滑触线供电。
28.本发明的有益效果在于:本发明是一种轨道车辆分离式新型山地轻轨系统,与现有技术相比,本发明具有如下优点:1》 发明技术安全性高,能满足苛刻的使用环境。轨道无人车的转向架内嵌于单轨轨道里面,即位于单轨轨道的内侧。转向架的驱动轮、稳定轮和导向轮均压在单轨轨道的内部表面上,即使在车轮磨损、大坡度、小弯道、大侧风的极限情况下,轨道无人车也无倾覆的危险。
29.2》 发明技术使用范围广。电动观光车可在公路由游客驾驶运行;当电动观光车驶入轨道上的轨道无人车上时,则在轨道无人车的拖动下在轨道上面自主运行,轨道延伸到哪里,电动观光车可延伸到哪里,游客只需待在电动观光车里面即可,从而大大增加了游客的风景区观光范围。
30.3》 发明技术施工难度小,施工成本低。轨道主体材料为型材焊接结构,可在轨道架设现场进行预制或者焊接作业。这在架设山地轻轨系统时是很方便的,尤其在大坡度(≥200
‰
)、小弯道(≤5m)的复杂地形风景区施工环境下具有突出的优势。轨道主体材料为型材焊接结构,由各个轨道段通过螺纹紧固件连接而成,安装、维护、拆卸均方便,综合成本低。
31.4》 发明技术为双供电方式,供电系统可靠。采用了电池、轨道滑触线双源、双作用、互补式供电系统,供电系统可靠。
附图说明
32.图1是本发明的整体结构示意图;图2是本发明的轨道支架结构示意图;图3是本发明的框架式轨道结构示意图;图4是本发明的轨道无人车结构示意图;图5是本发明的电动观光车底部结构示意图;图6是本发明的电动观光车顶部结构示意图;图7是本发明的电动推杆结构示意图;图8是本发明的双供电系统结构示意图。
33.图中:1、轨道支架;2、框架式轨道;3、轨道无人车;4、电动观光车;5、双供电系统;11、横向水平板;12、横向斜拉板;13、横向支板;14、纵向斜拉板;15、支架螺栓;21、轨道连接法兰;22、轨道支撑法兰;23、轨道加强法兰;24、轨道纵梁;25、轨道侧板;26、端部侧板;27、轨道底板;28、对接螺杆;29、侧板螺栓;31、由车架;32、内嵌式转向架;33、连接导向装置;34、永磁手动连接装置;35、自动连接固定板;36、无人驾驶控制器;41、电动观光车主体;42、连接板;43、电动推杆;44、顶部的吊环螺钉;40、电池;20、轨道滑触线;30、轨道无人车供电系统。
具体实施方式
34.下面结合附图对本发明作进一步说明:如图1所示:本发明由轨道支架1、框架式轨道2、轨道无人车3、电动观光车4和双供电系统5组成,所述框架式轨道2为防侧翻轨道,所述框架式轨道2固定设置于所述轨道支架1上,所述轨道无人车3位于所述框架式轨道2内,所述双供电系统5设置于所述框架式轨道2内,所述双供电系统5与所述轨道无人车3的供电端连接,所述电动观光车4与所述轨道无人车3可拆卸连接,所述轨道无人车3为能够在所述框架式轨道2内自主运行的无人驾驶平板车。
35.如图2所示:所述轨道支架1由横向水平板11、横向斜拉板12、横向支板13、纵向斜拉板14、支架螺栓15组成,所述横向支板13、横向斜拉板12和所述横向水平板11构成横向支架,所述横向斜拉板12和所述横向支板13均为两条,两条所述横向支板13的下端分别通过支架螺栓15固定与所述横向水平板11的两端,所述横向斜拉板12的下端固定设置于所述横向水平板11的中段一侧,所述横向斜拉板12和所述横向支板13的上端均与所述框架式轨道2的下端固定连接,所述框架式轨道2下端固定设置多个所述横向支架,相邻两个所述横向支架之间的所述横向支板13之间均较差设置两条所述纵向斜拉板14。安装、拆卸、调整方
便。两个横向支板13呈现八字形对称布置,其上端布置通孔,作为与轨道支撑法兰22的连接孔。轨道支架1根据现场实际需要可加长、缩减,但基本形式不变。
36.如图3所示:所述框架式轨道2由轨道连接法兰21、轨道支撑法兰22、轨道加强法兰23、轨道纵梁24、轨道侧板25、端部侧板26、轨道底板27、对接螺杆28和侧板螺栓29组成,所述轨道连接法兰21设置于所述轨道底板27的两端,所述轨道侧板25设置于所述轨道底板27的两侧,所述轨道侧板25通过所述侧板螺栓29固定在所述轨道纵梁24上,所述轨道侧板25和所述轨道底板27外设置所述轨道加强法兰23和所述轨道支撑法兰22,所述轨道支撑法兰22与所述轨道支架1连接,所述端部侧板26固定在所述轨道连接法兰21与所述轨道纵梁24之间。其中轨道连接法兰21、轨道支撑法兰22、轨道加强法兰23、轨道纵梁24和轨道底板27之间通过焊接方式相连接。轨道侧板25和端部侧板26通过侧板螺栓29固定在轨道纵梁24的两外侧面。轨道纵梁24共4根,呈镜像方式布置在框架式轨道2的四个角上。
37.该框架式轨道2由多段组成,段与段之间通过对接螺杆29相连接,拼接、拆卸、更换方便。
38.如图4所示:所述轨道无人车3由车架31、内嵌式转向架32、连接导向装置33、永磁手动连接装置34、自动连接固定板35、无人驾驶控制器36组成,所述车架的下端设置用于框架式轨道2内行走的内嵌式转向架32,所述车架上端面的前后两端均设置有连接所述电动观光车4的连接导向装置33,所述连接导向装置33中部的所述车架上设置有永磁手动连接装置34,所述车架的侧边设置有用于与电动观光车4连接的自动连接固定板35,所述车架上还设置有控制所述内嵌式转向架32驱动的无人驾驶控制器36。
39.车架31由各种型钢焊接而成,是承载顶部轨道无人车4、底部的内嵌式转向架32的主体。内嵌式转向架32完全嵌入在轨道2的内侧,从而从根本上避免了轨道平板车倾覆的可能,提高了安全性能。内嵌式转向架32与车架31通过回转支承相连接。
40.连接导向装置33、永磁手动连接装置34、自动连接固定板35作为与顶部电动观光车4的连接装置来配合使用。连接导向装置33主体为u型结构,共4个,焊接在车架31上面。永磁手动连接装置34通过螺栓固定在车架31上,前后各布置1组。自动连接固定板35带有长圆孔,共4个,焊接在车架31的纵梁上。
41.在使用时,首先电动观光车4驶入轨道无人车3上面。具体来说,是顶部电动观光车4的连接板42进入连接导向装置33的u型槽中。对准位置之后,电动观光车4的自动推杆43推出,并深入到自动连接固定板35的长圆孔中,达到对顶部电动观光车4机械固定的目的。
42.在顶部电动观光车4被机械固定之后,通过手扳动永磁手动连接装置34的手柄,等手柄转过180
°
之后,改变了永磁手动连接装置34内部结构磁力系统,产生磁力,吸住顶部电动观光车的连接板42,从而达到对顶部电动观光车4的磁力固定。
43.无人驾驶控制器36固定于车架31的底部,通过实时采集位置、坡度、速度、距离、障碍物等信号,内部进行逻辑判断,输出轨道无人车3的速度、制动等信号,来控制轨道无人车在轨道2上的自主运行。
44.如图5、6、7所示:所述电动观光车4由电动观光车主体41、连接板42、电动推杆43和顶部的吊环螺钉44组成,所述连接板42和所述电动推杆43固定设置于所述电动观光车主体41的底部,所述连接板42与所述轨道无人车3连接时位于所述连接导向装置33中,并与所述永磁手动连接装置34磁吸固定,同时,所述电动推杆43与所述自动连接固定板35扣接,所述
吊环螺钉固定设置于所述电动观光车主体41的顶部。
45.电动观光车4为电池驱动的新能源汽车。底部设置了能够固定在轨道无人车3上面的连接装置(连接板42、电动推杆43)。
46.该电动观光车4在公路上运行时,利用自身的一套驱动、转向、制动、控制系统运行。在轨道上运行时,利用底部的连接装置,可完成在轨道无人车3上面的的固定、运行和松开等一系列过程。
47.该新型电动观光车4顶部设置了4个吊环螺钉44,以方便该新型电动观光车4的空中救援。
48.在使用时,首先电动观光车4驶入轨道无人车3上面,其连接板42进入连接导向装置33的u型槽中。对准位置之后,电动观光车4的电动推杆43推出,并深入到自动连接固定板35的长圆孔中,达到对电动观光车4机械固定的目的。
49.在顶部电动观光车4被机械固定之后,通过手扳动永磁手动连接装置34的手柄,等手柄转过180
°
之后,改变了永磁手动连接装置34内部结构的磁力系统,产生磁力,吸住顶部电动观光车的连接板42,从而达到对顶部电动观光车4的磁力固定。
50.通过以上驶入、对准、固定、运行、脱开、驶离等一些列操作,达到了电动观光车4与轨道无人车3的无缝连接及在轨道上的正常运行。
51.如图8所示:所述双供电系统5为电池40、轨道滑触线20和轨道无人车供电系统30组成,所述轨道滑触线20敷设于所述框架式轨道2上,所述电池40设置于所述电动观光车4上,所述轨道无人车供电系统30设置于所述轨道无人车3上。双供电系统为电池40、位于轨道2上的轨道滑触线20组成的双源、双作用、互补式供电系统。电池40安装在电动观光车4上面,当电动观光车4在公路正常运行时,由电池40供电。电动观光车4驶入轨道无人车3上面后,电动观光车4上面的电池40与轨道无人车供电系统30接通,此时轨道无人车3由电池40和轨道滑触线20同时供电,轨道无人车3拖动电动观光车4在轨道2上面运行。
52.本发明轨道的主体材料为碳钢,也可以为不锈钢、铝合金、玄武岩纤维增强复合材料等,电动观光车也可以为电动汽车、内燃(汽油发动机、柴油发动机)汽车、混合动力汽车等其它类型的车辆,电动观光车也可以为吊厢、车厢、货柜等其它类型的能够载人载货的车体,电动观光车和轨道无人车的连接装置也可以采用电磁吸合的磁力固定装置,轨道支架为型材通过螺纹紧固件连接在一起,这些型材也可以通过焊接方式结合在一起。
53.以上显示和描述了本发明的基本原理和主要特征及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。