1.本实用新型涉及锻造设备领域,具体地说是一种锻造操作机行走机构。
背景技术:
2.锻造操作机是锻造车间实现锻造自动化的重要设备,其通常与锻造液压机配合使用,能够提高锻件品质和生产效率。现有技术中的锻造操作机通常需要实现行走、升降、倾斜、夹持、夹钳旋转等多种动作,其中锻造操作机的行走机构包括有轨和无轨两种方式,有轨方式通常在操作机下端设有滚轮和导轨,如授权公告号为cn209849795u的中国实用新型专利中就公开了一种移动位置精确的液压有轨操作机,该装置在操作机本体底端安装有滚轮沿着导轨移动,而操作机本体上设有用于驱动滚轮滚动的第一电机,但在实际应用中发现,由于锻造液压机反复捶打锻件,这会使锻造操作机承受较大冲击力,如果仅依靠电机自带的制动系统进行车体制动,容易导致制动失效,进而导致操作机在工作过程中受冲击力作用发生位移,造成较大的安全隐患,同时也会使锻件位置发生偏差,影响锻件质量。
3.为了解决上述问题,现有技术中出现了一些新的制动结构,如授权公告号为cn212094197u的中国实用新型专利中公开了一种锻造操作机的自动化定位装置,其在锻造机本体的滚轮上方设置了两个交叉的刹车钳,该装置利用刹车钳将滚轮抱紧以固定住操作机的位置,进而保证锻件锻造工作的正常进行,但该装置的刹车钳直接作用于车体滚轮上,并且为了保证操作机固定牢固,刹车钳抱紧力较大,这容易对车体滚轮造成损伤,影响滚轮与导轨之间的配合,进而导致车体移动卡滞。
技术实现要素:
4.本实用新型的目的在于提供一种锻造操作机行走机构,能够保证操作机移动锁定牢固,既降低了设备的安全风险,也可以有效避免锻件发生位移影响锻造质量。
5.本实用新型的目的是通过以下技术方案来实现的:
6.一种锻造操作机行走机构,包括驱动电机、传动轴、滚轮驱动轴、滚轮和多个齿轮,其中驱动电机的输出轴上设有第一驱动齿轮,且所述第一驱动齿轮与设于传动轴一端的第一从动齿轮啮合,传动轴另一端设有第二驱动齿轮,且所述第二驱动齿轮与设于滚轮驱动轴上的第二从动齿轮啮合,所述滚轮驱动轴两端均设有第三驱动齿轮,各个滚轮均安装于操作机下侧的行走架中,且所述滚轮内侧同轴设有第三从动齿轮,所述第三驱动齿轮与对应的第三从动齿轮啮合,所述行走架外侧设有抱持组件,且所述第一从动齿轮通过所述抱持组件锁定。
7.所述行走架上设有支撑座,所述传动轴安装于所述支撑座上,且所述第一从动齿轮和第二驱动齿轮分设于所述支撑座两侧,另外所述滚轮驱动轴的对应侧端部也安装于所述支撑座上。
8.所述行走架远离所述支撑座一侧设有滚轴支座,所述滚轮驱动轴另一端安装于所述滚轴支座上。
9.所述抱持组件包括抱持驱动装置和抱持夹板,且两个抱持夹板通过所述抱持驱动装置驱动张合。
10.所述抱持驱动装置安装于一个抱持支架上,所述抱持支架可调整地设于所述行走架上。
11.所述第一从动齿轮两侧各设有一组抱持组件。
12.所述驱动电机上设有编码器。
13.本实用新型的优点与积极效果为:
14.1、本实用新型利用抱持组件抱持锁紧第一从动齿轮实现整个机构锁定,从而避免锁紧时滚轮直接受力产生损伤。
15.2、本实用新型中的齿轮可采用自锁齿轮辅助整个机构锁定,并且本实用新型采用多个齿轮传动,也能够精确控制操作机本体的位移。
16.3、本实用新型可根据需要在第一从动齿轮两侧各设置一组抱持组件,并且所述抱持组件位置可根据需要进行调整,以充分保证机构锁定牢靠。
附图说明
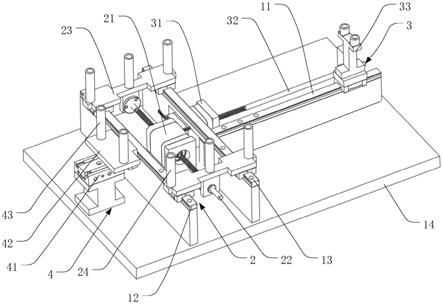
17.图1为本实用新型的传动示意图,
18.图2为本实用新型的使用状态示意图,
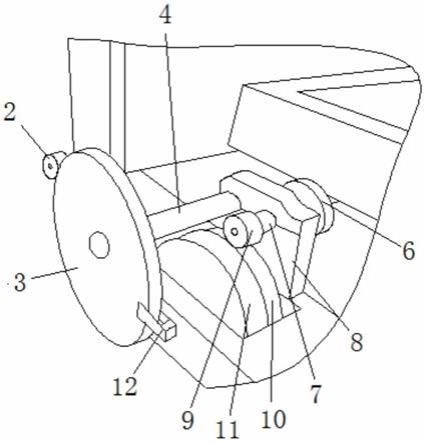
19.图3为图2中的抱持组件示意图。
20.其中,1为驱动电机,2为第一驱动齿轮,3为第一从动齿轮,4为传动轴,5为第二驱动齿轮,6为第二从动齿轮,7为滚轮驱动轴,8为支撑座,9为第三驱动齿轮,10为第三从动齿轮,11为滚轮,12为抱持组件,121为抱持驱动装置,122为抱持夹板,123为抱持支架,13为滚轴支座。
具体实施方式
21.下面结合附图对本实用新型作进一步详述。
22.如图1~3所示,本实用新型包括驱动电机1、传动轴4、滚轮驱动轴7、滚轮11和多个齿轮,其中驱动电机1的输出轴上设有第一驱动齿轮2,且所述第一驱动齿轮2与设于传动轴4一端的第一从动齿轮3啮合,传动轴4另一端设有第二驱动齿轮5,且所述第二驱动齿轮5与设于滚轮驱动轴7上的第二从动齿轮6啮合,所述滚轮驱动轴7两端均设有第三驱动齿轮9,各个滚轮11均安装于操作机下侧的行走架中,且所述滚轮11内侧同轴设有第三从动齿轮10,所述第三驱动齿轮9与对应的第三从动齿轮10啮合,所述行走架外侧设有抱持组件12,且所述第一从动齿轮3通过所述抱持组件12锁定。
23.如图1~2所示,所述行走架上设有支撑座8,所述传动轴4安装于所述支撑座8上,且所述第一从动齿轮3和第二驱动齿轮5分设于所述支撑座8两侧,另外所述滚轮驱动轴7的对应侧端部也安装于所述支撑座8上,所述行走架远离所述支撑座8一侧设有滚轴支座13,所述滚轮驱动轴7另一端安装于所述滚轴支座13上,而在行走架前端设有从动滚轮沿着导轨移动。
24.如图3所示,本实施例中,所述抱持组件12包括抱持驱动装置121和抱持夹板122,且两个抱持夹板122通过所述抱持驱动装置121驱动闭合夹紧所述第一从动齿轮3边缘。所
述抱持驱动装置121可采用夹爪气缸或夹爪液压缸,此为本领域公知技术且为市购产品。
25.如图3所示,所述抱持驱动装置121安装于一个抱持支架123上,所述抱持支架123可调整地设于行走架上,本实施例中,所述行走架外侧设有多组螺栓孔,所述抱持支架123根据抱持锁定需要调整位置和高度,待抱持支架123位置确定后再通过螺栓安装于对应一组螺栓孔上实现固定。
26.本实用新型可根据需要在第一从动齿轮3两侧各设有一组抱持组件12,保证抱持锁紧牢靠。
27.所述第一驱动齿轮2、第一从动齿轮3、第二驱动齿轮5、第二从动齿轮6、第三驱动齿轮9、第三从动齿轮10均采用自锁齿轮以辅助操作机行走架锁定。
28.所述驱动电机1上设有编码器用于精确测量输出转速,本实用新型采用齿轮传动,设备系统可根据驱动电机1输出转速以及各个齿轮传动比进行换算以精确获得滚轮11移动距离,进而通过控制驱动电机1转速实现操作机本体位移的精确控制。所述编码器为市购产品。
29.本实用新型的工作原理为:
30.本实用新型工作时,驱动电机1通过第一驱动齿轮2和第一从动齿轮3传递转矩驱动传动轴4转动,所述传动轴4通过第二驱动齿轮5和第二从动齿轮6驱动滚轮驱动轴7转动,所述滚轮驱动轴7则通过两端的第三驱动齿轮9分别驱动对应滚轮11内侧的第三从动齿轮10转动,进而实现行走架后端的滚轮11转动,所述滚轮11与设于地面上的导轨配合移动并驱动整个操作机移动,所述驱动电机1、支撑座8、滚轴支座13均安装于所述行走架上,另外所述行走架前端设有从动滚轮沿着地面上的导轨移动。当操作机停止时,本实用新型一方面利用抱持组件12抱持锁紧所述第一从动齿轮3实现整个机构锁定,另一方面本实用新型中的齿轮可采用自锁齿轮辅助机构锁定,并且由于第一从动齿轮3面积相对较大,所述第一从动齿轮3两侧可根据需要各设有一组抱持组件12,以保证机构锁定牢靠。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。