1.本技术涉及工件抛光设备技术领域,具体涉及一种抛光设备及抛光方法。
背景技术:
2.随着3c产品行业的快速发展,人们对工件的外观要求也越来越高。现有工件在加工完成后,还需要对工件进行抛光作业,以使工件的外观达到镜面效果。目前的设备中,对工件的抛光方式大致为:通过抛光头或抛光件的运动(如旋转、振动等),工件相对于抛光头或抛光件移动以对工件进行抛光作业。然而,该方式中,工件进行抛光作业时,抛光头或抛光件与工件之间的作用力无法及时进行适应性调节,导致抛光头或抛光件对工件的抛光量不均匀,导致工件的抛光品质和生产效率降低。
技术实现要素:
3.鉴于以上内容,有必要提出一种抛光设备及抛光方法,以使抛光头或抛光件与工件之间的作用力能够进行自动调节,进而使抛光头或抛光件对工件进行均匀抛光,提升工件的抛光品质和生产效率。
4.本技术提供一种抛光设备,包括:
5.抛光装置,包括运动的用于抛光工件的抛光组件;
6.固定装置,包括:
7.旋转机构,用于固定并带动工件旋转;
8.感应器,与所述旋转机构连接,用于感应所述工件抛光时所受到的作用力;
9.移动补偿组件,与所述旋转机构连接,用于带动所述旋转机构移动,以使所述工件进行补偿移动;
10.第一移动组件,与所述移动补偿组件连接,用于带动所述移动补偿组件和所述旋转机构沿第一方向移动;
11.第二移动组件,与所述第一移动组件连接,用于带动所述第一移动组件沿与所述第一方向不同的第二方向移动;及
12.控制器,与所述抛光装置、所述固定装置分别耦接,用于控制所述抛光组件转动以调节所述抛光组件相对所述工件的抛光角度,还用于控制所述固定装置带动所述工件旋转、沿所述第一方向移动、沿所述第二方向移动和补偿移动中至少之一,以使所述工件相对所述抛光组件移动进行抛光。
13.本技术提供的抛光设备,通过抛光装置中的抛光组件运动的对工件进行抛光,固定装置中的感应器感应工件抛光时所受到的作用力,移动补偿组件根据感应器所感应的作用力带动旋转机构移动以对工件进行补偿移动,使得抛光组件与工件之间的作用力能够进行自动补偿调节,使抛光组件对工件的抛光量均匀,有利于提升工件的抛光品质和生产效率。
14.在一些实施例中,所述感应器包括感应壳体,及设于所述感应壳体的感应件、信号
传输件和密封件;
15.所述密封件环绕所述感应件设于所述感应壳体,
16.所述信号传输件与所述感应件连接且凸出于所述感应壳体以与所述控制器耦接;
17.所述感应壳体位于所述旋转机构与所述移动补偿组件之间,并与所述旋转机构、所述移动补偿组件分别连接,其中,
18.所述感应件与所述旋转机构相抵接。
19.在一些实施例中,所述固定装置进一步包括:
20.连接板,位于所述旋转机构与所述感应壳体之间,并与所述旋转机构、所述感应壳体分别连接;
21.所述感应件朝面向所述连接板的方向凸出于所述密封件;
22.所述连接板面向所述感应壳体的一侧具有一凸起的抵接部,所述抵接部与所述感应件相抵接。
23.在一些实施例中,所述移动补偿组件包括:
24.移动壳体,与所述第一移动组件连接;
25.移动导轨,设于所述移动壳体且沿补偿移动的方向延伸;
26.移动传动件,设于所述移动壳体且沿补偿移动的方向延伸;
27.移动滑台,一端与所述移动传动件连接且与所述移动导轨滑动连接,另一端与所述旋转机构连接;及
28.移动驱动件,与所述控制器耦接,设于所述移动壳体且与所述移动传动件连接,用于驱动所述移动传动件转动以使所述移动滑台沿所述移动导轨移动。
29.在一些实施例中,所述抛光装置进一步包括:
30.驱动组件,与所述控制器耦接,并与所述抛光组件连接,用于带动所述抛光组件沿一轴向旋转,以调节所述抛光组件相对所述工件的抛光角度;
31.第三移动组件,与所述控制器耦接,并与所述驱动组件连接,用于带动所述驱动组件和所述抛光组件沿与所述第一方向和所述第二方向不同的第三方向移动,以使所述抛光组件靠近或远离所述工件。
32.在一些实施例中,所述旋转机构包括:
33.固定组件,用于固定所述工件;
34.旋转组件,与所述控制器耦接,位于所述固定组件与所述移动补偿组件之间,并与所述固定组件、所述移动补偿组件分别连接,用于带动所述固定组件及所述工件旋转。
35.在一些实施例中,所述感应器位于所述固定组件和所述旋转组件之间,并与所述固定组件、所述旋转组件分别连接。
36.在一些实施例中,所述旋转组件包括:
37.旋转轴,一端与所述固定组件连接;
38.联轴件,与所述旋转轴的另一端连接;
39.旋转驱动件,与所述控制器耦接,并与所述联轴件传动连接,用于驱动所述联轴件以带动所述旋转轴转动。
40.本技术同时提供一种抛光方法,用于控制一抛光设备对工件进行抛光,包括:
41.控制所述工件旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以
使所述工件相对所述抛光设备中的抛光组件移动进行抛光。
42.本技术提供的抛光方法,通过控制工件旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以使工件相对抛光设备中的抛光组件移动进行抛光,使得抛光组件与工件之间的作用力能够进行自动补偿调节,使抛光组件对工件的抛光量均匀,有利于提升工件的抛光品质和生产效率。
43.在一些实施例中,所述抛光方法进一步包括:
44.控制所述工件移动至与所述抛光组件相对应的初始位置,并使所述工件抵触所述抛光组件;
45.控制所述抛光组件转动,以调节所述抛光组件对所述工件的抛光角度。
46.在一些实施例中,所述抛光方法进一步包括:
47.获取所述工件抵触所述抛光组件时受到的作用力;
48.控制所述工件进行补偿移动,以使所述作用力属于预设范围内。
49.在一些实施例中,所述抛光方法进一步包括:
50.控制所述抛光组件沿与所述第一方向和所述第二方向不同的第三方向移动,以使所述作用力属于预设范围内。
51.在一些实施例中,其中,所述控制所述工件旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以使所述工件相对所述抛光设备中的抛光组件移动进行抛光,包括:
52.控制所述工件沿所述第一方向移动第一预设距离,以使所述工件沿所述第一方向相对所述抛光组件移动进行抛光;
53.控制所述工件旋转第一预设角度,并沿所述第一方向和所述第二方向中至少之一移动,所述第二方向与所述第一方向非同向,以使所述工件旋转时相对所述抛光组件移动进行抛光;
54.控制所述工件沿所述第一方向移动第二预设距离,以使所述工件沿所述第一方向相对所述抛光组件移动进行抛光;
55.控制所述工件旋转第二预设角度,并沿所述第一方向和所述第二方向中至少之一移动,以使所述工件旋转时相对所述抛光组件移动进行抛光,并回到所述初始位置;
56.控制所述工件沿补偿移动的方向移动补偿预设距离,以使所述工件抵触所述工件时所受到的作用力属于预设范围内。
57.在一些实施例中,其中,所述补偿移动的方向包括所述第一方向和所述第二方向。
附图说明
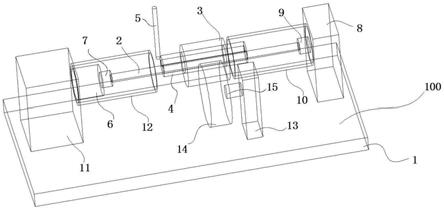
58.图1是本技术一些实施例提供的抛光设备的立体结构示意图。
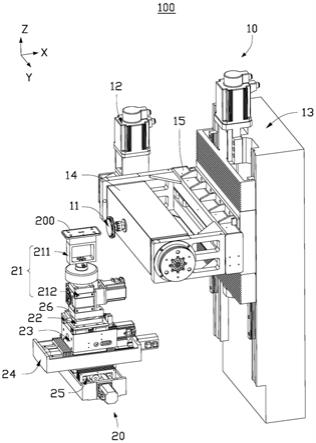
59.图2是图1所示的固定装置的分解结构示意图。
60.图3是一些实施例提供的抛光设备抛光工件3d面的状态示意图。
61.图4是一些实施例提供的抛光设备抛光工件侧面的状态示意图。
62.图5是一些实施例提供的抛光设置抛光工件顶面的状态示意图。
63.图6是图2所示的感应器和连接板的结构示意图。
64.图7是图2所示的移动补偿组件的分解结构示意图。
65.图8是图2所示的第一移动组件和第二移动组件的分解结构示意图。
66.图9是图1所示的抛光装置的分解结构示意图。
67.图10是本技术一些实施例提供的抛光方法的流程示意图。
68.图11是图10所示的s10的具体流程示意图。
69.主要元件符号说明
70.抛光设备
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
71.抛光装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
72.抛光组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
73.驱动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
74.第三移动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
75.第三壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131
76.第三导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132
77.第三传动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
133
78.第三滑台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
134
79.第三驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
135
80.第三滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
136
81.第三滑动座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
137
82.第三缓冲件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
138
83.承载件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
84.支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15
85.固定装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
86.旋转机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
87.固定组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211
88.旋转组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212
89.旋转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2121
90.联轴件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2122
91.旋转驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2123
92.旋转底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2124
93.感应器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
94.感应壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
221
95.感应件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
222
96.信号传输件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
223
97.密封件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
224
98.移动补偿组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
99.移动壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
231
100.移动导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
232
101.移动传动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
233
102.移动滑台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
234
103.移动驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
235
104.移动滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
236
105.移动滑动座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
237
106.第一移动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24
107.第一壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
241
108.第一导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
242
109.第一传动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
243
110.第一滑台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
244
111.第一驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
245
112.第一滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
246
113.第一滑动座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
247
114.第一缓冲件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
248
115.第二移动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25
116.第二壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
251
117.第二导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
252
118.第二传动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
253
119.第二滑台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
254
120.第二驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
255
121.第二滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
256
122.第二滑动座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
257
123.第二缓冲件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
258
124.连接板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26
125.抵接部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
261
126.工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
具体实施方式
127.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
128.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,需要说明的是,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
129.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可
以是机械连接,也可以是电连接或可以相互通讯,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
130.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一特征和第二特征直接接触,也可以包括第一特征和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平厚度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平厚度小于第二特征。
131.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。
132.本技术实施例提供一种抛光设备,包括:抛光装置,包括运动的用于抛光工件的抛光组件;固定装置,包括:旋转机构,用于固定并带动工件旋转;感应器,与该旋转机构连接,用于感应该工件抛光时所受到的作用力;移动补偿组件,与该旋转机构连接,用于带动该旋转机构移动,以使该工件进行补偿移动;第一移动组件,与该移动补偿组件连接,用于带动该移动补偿组件和该旋转机构沿第一方向移动;第二移动组件,与该第一移动组件连接,用于带动该第一移动组件沿与该第一方向不同的第二方向移动;及控制器,与该抛光装置、该固定装置分别耦接,用于控制该抛光组件转动以调节该抛光组件相对该工件的抛光角度,还用于控制该固定装置带动该工件旋转、沿该第一方向移动、沿该第二方向移动和补偿移动中至少之一,以使该工件相对该抛光组件移动进行抛光。
133.上述抛光设备,通过抛光装置中的抛光组件运动的对工件进行抛光,固定装置中的感应器感应工件抛光时所受到的作用力,移动补偿组件根据感应器所感应的作用力带动旋转机构移动以对工件进行补偿移动,使得抛光组件与工件之间的作用力能够进行自动补偿调节,使抛光组件对工件的抛光量均匀,有利于提升工件的抛光品质和生产效率。
134.本技术实施例同时提供一种抛光方法,用于控制一抛光设备对工件进行抛光,包括:控制该工件旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以使该工件相对该抛光设备中的抛光组件移动进行抛光。
135.上述抛光方法,通过控制工件旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以使工件相对抛光设备中的抛光组件移动进行抛光,使得抛光组件与工件之间的作用力能够进行自动补偿调节,使抛光组件对工件的抛光量均匀,有利于提升工件的抛光品质和生产效率。
136.以下结合附图,对本技术各实施例进行详细说明。
137.请参见图1,图1示出了本技术一些实施例提供的抛光设备。抛光设备100用于对工件200进行抛光,工件200可以为手机边框、背壳等常规物料,也可以为具有仿形表面的物料,但不限于此。抛光设备100包括抛光装置10、固定装置20及控制器(图未示)。
138.抛光装置10包括运动的用于抛光工件200的抛光组件11,可以理解为抛光组件11
为动态设置。
139.请一并参见图2,固定装置20可以包括旋转机构21、感应器22、移动补偿组件23、第一移动组件24和第二移动组件25。
140.旋转机构21用于固定并带动工件200旋转,以使工件200能够相对抛光组件11运动以被抛光组件11抛光。感应器22与旋转机构21连接,感应器22用于感应工件200抛光时所受到的作用力,该作用力可以理解为抛光组件11对工件200进行抛光时,抛光组件11与工件200之间所产生的相互作用力,该作用力偏大,则抛光组件11对工件200的抛光量偏大;反之,该作用力偏小,则抛光组件11对工件200的抛光量偏小。上述两种情况,均会影响工件200的抛光良率。移动补偿组件23与旋转机构21连接,移动补偿组件23用于带动旋转机构21移动,以使工件200进行补偿移动,从而使得抛光组件11与工件200之间的作用力属于一预设范围。第一移动组件24与移动补偿组件23连接,用于带动移动补偿组件23和旋转机构21沿第一方向移动。第二移动组件25与第一移动组件24连接,用于带动第一移动组件24沿与第一方向不同的第二方向移动。其中,补偿移动的方向可以为第一方向、第二方向中之一,或由第一方向与第二方向合成的其他方向,但不限于此。
141.为了便于说明,本技术中,第一方向定义为如图1所示的x轴方向,第二方向定义为如图1所示的y轴方向。本实施例中,第一方向与第二方向相垂直。
142.可以理解地,在其他的实施例中,第一方向与第二方向还可以不垂直,第一方向与第二方向之间的夹角可以为30
°
、45
°
、60
°
、75
°
等。
143.控制器与抛光装置10、固定装置20分别耦接,也可以理解为控制器还可以与旋转机构21、感应器22、移动补偿组件23、第一移动组件24、第二移动组件25耦接,控制器用于控制承载件14沿中轴线旋转以调节抛光组件11相对工件200的抛光角度本实施例中,承载件14的中轴线垂直于抛光组件11的旋转轴线。控制器还用于控制固定装置20带动工件200旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以使工件200相对抛光组件11移动进行抛光,也可以理解为控制器还用于控制旋转机构21带动工件200旋转、第一移动组件24间接带动工件200沿第一方向移动、第二移动组件25间接带动工件200沿第二方向移动和移动补偿组件23带动工件200补偿移动中至少之一。可以理解地,抛光组件11本身是可以旋转运动地,即沿自身轴线旋转,以达到对工件200进行抛光作业的目的,但抛光组件11的移动及调节对工件200抛光角度的旋转则由承载件14带动。
144.一些实施例提供的抛光设备100的实施过程大致可以为:首先,将待抛光的工件200固定于旋转机构21;然后,控制器控制第一移动组件24和第二移动组件25带动工件200做与工件自身外形相仿的仿形运动,以使工件200与抛光组件11相抵触进行抛光;接着,控制器控制抛光组件11旋转至预设角度,以使抛光组件11以合适的抛光角度对工件200进行抛光;接着,控制器控制第一移动组件24、第二移动组件25和旋转机构21相互配合以使工件200相对抛光组件11做仿形运动,以进行抛光,直至工件200抛光完成。其中,在工件200相对抛光组件11移动进行抛光的过程中,感应器22实时感应工件200抛光时所受到的作用力并将该作用力以数据信号的形式传输至控制器,控制器根据该数据信号判断该作用力偏大还是偏小。当控制器判断该作用力偏大或偏小时,控制器还控制移动补偿组件23带动旋转机构21移动,以使工件200进行补偿移动,进而使得工件200与抛光组件11之间的作用力属于预设范围。示例性地,当控制器判断该作用力偏大时,表示工件200与抛光组件11之间抵触
过紧,控制器控制移动补偿组件23带动工件200朝远离抛光组件11的方向移动,以使工件200与抛光组件11之间的抵触适度,从而使工件200与抛光组件11之间的作用力属于预设范围。
145.请参见图3,一些实施例提供的抛光设备100抛光工件200的3d面,工件200的3d面也可以理解为工件200的弧形面。抛光设备100的抛光组件11旋转至一预设角度α对工件200的3d面进行抛光。抛光组件11抛光工件200时,感应器22感应工件200所受到的作用力为f,作用力f可由水平方向的作用力fx和垂直方向的作用力fz合成,fx=fcosα,fz=fsinα,也可以理解为工件200所受到的水平方向的作用力为fx,垂直方向的作用力为fz。示例性地,工件200与抛光组件11之间的水平方向的作用力范围为fx
′
,垂直方向的作用力范围为fz
′
时,表示工件200与抛光组件11之间的作用力属于预设范围。然而,当fx大于或小于fx
′
,fz大于或小于fz
′
时,均表示工件200与抛光组件11之间的作用力不属于预设范围,抛光设备100需要进行补偿。例如,当fx》fx
′
时,表示工件200与抛光组件11之间的水平方向的作用力偏大,控制器控制移动补偿组件23带动工件200沿水平方向远离抛光组件11,使得fx=fx
′
。当fx《fx
′
时,表示工件200与抛光组件11之间的水平方向的作用力偏小,控制器控制移动补偿组件23带动工件200沿水平方向靠近抛光组件11,使得fx=fx
′
。当fz》fz
′
时,表示工件200与抛光组件11之间的垂直方向的作用力偏大,控制器控制移动补偿组件23带动工件200沿水平方向远离抛光组件11,在其它实施例中,也可由控制器控制抛光装置10使抛光组件11沿垂直方向远离工件200,使得fz=fz
′
。当fz《fz
′
时,表示工件200与抛光组件11之间的垂直方向的作用力偏小,控制器控制移动补偿组件23带动工件200沿水平方向靠近抛光组件11,在其它实施例中,也可由控制器控制抛光装置10使抛光组件11沿垂直方向靠近工件200,使得fz=fz
′
。如此,使得抛光组件11与工件200之间的作用力能够进行自动补偿调节,使抛光组件11对工件200的抛光量均匀。
146.请参见图4,一些实施例提供的抛光设备100抛光工件200的侧面。抛光设备100的抛光组件11与工件200的侧面相垂直以对工件200的侧面进行抛光。抛光组件11抛光工件200时,感应器22感应工件200所受到的作用力为f,作用力f也可以理解为仅由水平方向的作用力fx合成,工件200在垂直方向与抛光组件11之间不产生作用力。示例性地,工件200与抛光组件11之间的水平方向的作用力范围为fx
′
时,表示工件200与抛光组件11之间的作用力属于预设范围。然而,当fx大于或小于fx
′
时,均表示工件200与抛光组件11之间的作用力不属于预设范围,抛光设备100需要进行补偿。例如,当fx》fx
′
时,表示工件200与抛光组件11之间的水平方向的作用力偏大,控制器控制移动补偿组件23带动工件200沿水平方向远离抛光组件11,使得fx=fx
′
。当fx《fx
′
时,表示工件200与抛光组件11之间的水平方向的作用力偏小,控制器控制移动补偿组件23带动工件200沿水平方向靠近抛光组件11,使得fx=fx
′
。如此,使得抛光组件11与工件200之间的作用力能够进行自动补偿调节,使抛光组件11对工件200的抛光量均匀。
147.请参见图5,一些实施例提供的抛光设备100抛光工件200的顶面。抛光设备100的抛光组件11与工件200的顶面相垂直以对工件200的顶面进行抛光。抛光组件11抛光工件200时,感应器22感应工件200所受到的作用力为f,作用力f也可以理解为仅由垂直方向的作用力fz合成,工件200在水平方向与抛光组件11之间不产生作用力。示例性地,工件200与抛光组件11之间的垂直方向的作用力范围为fz
′
时,表示工件200与抛光组件11之间的作用
力属于预设范围。然而,当fz大于或小于fz
′
时,均表示工件200与抛光组件11之间的作用力不属于预设范围,抛光设备100需要进行补偿。例如,当fz》fz
′
时,表示工件200与抛光组件11之间的垂直方向的作用力偏大,控制器控制移动补偿组件23带动工件200沿垂直方向远离抛光组件11,或控制器控制抛光装置10使抛光组件11沿垂直方向远离工件200,使得fz=fz
′
。当fz《fz
′
时,表示工件200与抛光组件11之间的垂直方向的作用力偏小,控制器控制移动补偿组件23带动工件200沿垂直方向靠近抛光组件11,或控制器控制抛光装置10使抛光组件11沿垂直方向靠近工件200,使得fz=fz
′
。如此,使得抛光组件11与工件200之间的作用力能够进行自动补偿调节,使抛光组件11对工件200的抛光量均匀。
148.在一些实施例中,还提供抛光设备100,通过抛光装置10中的抛光组件11运动的对工件200进行抛光,固定装置20中的感应器22感应工件200抛光时所受到的作用力,控制器根据该作用力控制移动补偿组件23带动旋转机构21移动以对工件200进行补偿移动,使得抛光组件11与工件200之间的作用力能够进行自动补偿调节,使以使抛光组件11与工件200之间的作用力属于预设范围,抛光组件11对工件200的抛光量均匀,有利于提升工件200的抛光品质和生产效率。
149.在一些实施例中,控制器可以为触控操作组件,该触控操作组件可以包括处理器(图未示)、存储器(图未示)、显示屏(图未示)等元件,处理器用于接收数据、处理数据及发送数据,存储器用于存储数据、指令,该数据、指令可被处理器读取、执行,显示屏用于显示信息、接收触控指令并发送该触控指令至处理器。
150.可以理解地,在其他的实施例中,控制器还可以为计算机设备、中央处理器(cpu,central processing unit)、通用处理器、数字信号处理器(dsp,digital signal processor)、专用集成电路(asic,application specific integrated circuit)、现场可编程门阵列(fpga,field-programmable gate array)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。控制器是上述抛光设备100的控制中心,利用各种接口和线路连接整个抛光设备100的各个部分。
151.在一些实施例中,旋转机构21可以包括固定组件211和旋转组件212。
152.固定组件211用于固定工件200。旋转组件212与控制器耦接,旋转组件212位于固定组件211与移动补偿组件23之间,并与固定组件211、移动补偿组件23分别连接,旋转组件212用于带动固定组件211及工件200旋转。
153.示例性地,固定组件211用于固定工件200的一端与工件200相适配,可用于内撑工件200或承载工件200。旋转组件212包括旋转轴2121、联轴件2122和旋转驱动件2123。旋转轴2121的一端与固定组件211连接,使得固定组件211可以跟随旋转轴2121一起转动;联轴件2122与旋转轴2121的另一端连接;旋转驱动件2123与控制器耦接,并与联轴件2122传动连接,旋转驱动件2123用于驱动联轴件2122以带动旋转轴2121进行转动。其中,旋转驱动件2123可以为伺服电机,联轴件2122实现了旋转驱动件2123的驱动力在不同方向上的传导。如此,旋转机构21的结构紧凑、合理、稳定。
154.在一些实施例中,旋转机构21还可以包括旋转底座2124。旋转底座2124大致为短圆柱形,旋转底座2124的直径大于旋转轴2121的直径,旋转底座2124的一端与固定组件211连接,旋转底座2124的另一端与旋转轴2121连接。如此,固定组件211与旋转组件212的连接简单、稳定。显然,旋转底座2124也可以省略。
155.可以理解地,在其他的实施例中,旋转驱动件2123还可以直接与旋转轴2121连接。如此,联轴件2122也可以省略。
156.可以理解地,在其他的实施例中,固定组件211用于固定工件200的一端还可以为吸盘或真空吸嘴,该吸盘或真空吸嘴通过真空负压吸附工件200,以避免固定组件211固定工件200时对工件200造成碰、刮、压伤。
157.请参见图6,在一些实施例中,感应器22可以包括感应壳体221,及设于感应壳体221的感应件222、信号传输件223和密封件224。感应壳体221大致为圆形板状。感应件222用于感应工件200抛光时所受到的作用力,感应件222大致位于感应壳体221的中间位置。密封件224环绕感应件222设于感应壳体221,密封件224可以为密封橡胶圈或密封硅胶圈,密封件224用于对感应件222进行密封,避免感应件222因受到抛光液、粉尘污染而受损或被干扰。信号传输件223与感应件222连接且凸出于感应壳体221以与控制器耦接,信号传输件223用于将感应件222所感应的数据信号进行传输。
158.感应壳体221位于旋转机构21与移动补偿组件23之间,并与旋转机构21、移动补偿组件23分别连接。其中,感应件222与旋转机构21相抵接,用于感应旋转机构21所传导的作用力。
159.可以理解地,在其他的实施例中,感应器22的感应壳体221还可以位于固定组件211和旋转组件212之间,并与固定组件211和旋转组件212分别连接,感应件222与固定组件211相抵接。与之相应的,移动补偿组件23与旋转组件212连接。
160.在一些实施例中,固定装置20还可以包括连接板26。连接板26大致为板状,连接板26位于旋转机构21与感应壳体221之间,并与旋转机构21、感应壳体221分别连接。如此,通过连接板26对旋转机构21进行承载,有利于受力传导及提高感应器22的感应精度,减小误差。
161.可以理解地,在其他的实施例中,当感应器22的感应壳体221位于固定组件211和旋转组件212之间时,连接板26则应位于固定组件211与感应壳体221之间并与固定组件211和感应壳体221分别连接。
162.在一些实施方式中,感应件222朝面向连接板26的方向凸出于密封件224,可以理解为沿如图6所示的z轴方向,感应件222高于密封件224,以使感应件222大致为凸起结构。连接板26面向感应壳体221的一侧具有一凸起的抵接部261,连接板26与感应壳体221连接时,抵接部261与感应件222相抵接。如此,通过凸起的抵接部261与感应件222相抵接,使得连接板26与感应件222之间为过盈紧密连接,有利于将连接板26所受的作用力传导至感应件222,提高感应件222的感应精度,减小误差。
163.可以理解地,在其他的实施例中,感应件222还可以凸出于感应壳体221面向连接板26的一侧。如此,使得感应件222与连接板26为过盈紧密连接,提高感应件222的感应精度,减小误差。
164.请参见图7,在一些实施例中,移动补偿组件23可以包括移动壳体231、移动导轨232、移动传动件233、移动滑台234及移动驱动件235。
165.移动壳体231用于容纳承载移动导轨232、移动传动件233、移动滑台234及移动驱动件235,移动壳体231与第一移动组件24连接。移动导轨232的数量为两个,两个移动导轨232相对设于移动壳体231内且均沿移动补偿的方向延伸,本实施例中移动补偿的方向为第
一方向,即沿x轴方向靠近或远离抛光组件11,以控制抛光组件11与工件200之间的作用力在预设范围内,但移动补偿的方向不限于此。移动传动件233可转动地设于移动壳体231且位于两个移动导轨232之间,移动传动件233沿移动补偿的方向延伸。移动滑台234大致为板状,移动滑台234的一侧与移动传动件233及移动导轨232滑动连接,移动滑台234的另一侧与旋转机构21或感应壳体221连接。移动驱动件235与控制器耦接,移动驱动件235设于移动壳体231且与移动传动件233连接,移动驱动件235用于驱动移动传动件233转动以使移动滑台234沿移动导轨232的延伸方向移动。
166.在一些实施例中,移动补偿组件23还可以包括移动滑块236和移动滑动座237。移动滑块236的数量为四个,两两设于一移动导轨232;移动滑动座237滑动地设于移动传动件233,移动滑动座237在移动传动件233转动时相对移动传动件233移动。相应地,移动滑台234的一侧与移动滑块236和移动滑动座237连接,并跟随移动滑动座237沿移动导轨232的延伸方向移动。
167.移动传动件233和移动滑动座237大致可以为滚珠丝杠结构。移动驱动件235可以为伺服电机,移动传动件233通过轴承与移动壳体231可转动地连接。可以理解地,移动滑块236的数量还可以为两个、三个、五个、六个或更多个。
168.可以理解地,在其他的实施例中,移动补偿组件23还可以为直线气缸机构,旋转机构21或感应壳体221与直线气缸机构的输出端连接。如此,移动补偿组件23仍然能够实现工件200的补偿移动。
169.请参见图8,在一些实施例中,第一移动组件24可以包括第一壳体241、第一导轨242、第一传动件243、第一滑台244、第一驱动件245、第一滑块246、第一滑动座247和第一缓冲件248。
170.第一壳体241用于容纳承载第一导轨242、第一传动件243、第一滑台244、第一驱动件245、第一滑块246、第一滑动座247和第一缓冲件248,第一壳体241与第二移动组件25连接。第一导轨242的数量为两个,两个第一导轨242相对设于第一壳体241内且均沿第一方向延伸,第一滑块246的数量为四个,两两设于一个第一导轨242上。第一传动件243设于第一壳体241内且位于两个第一导轨242之间,第一传动件243沿第一方向延伸。第一滑动座247滑动地设于第一传动件243上。第一驱动件245与第一传动件243的一端连接,第一驱动件245用于驱动第一传动件243转动,从而使得第一滑动座247沿第一传动件243运动,即使得第一滑动座247沿第一方向运动。第一滑台244大致为板状,第一滑台244的一侧与第一滑动座247及第一滑块246连接,第一滑台244在第一滑动座247的带动下沿第一方向运动。第一滑台244的另一侧与移动补偿组件23的移动壳体231连接,如此,使得移动补偿组件23在第一滑台244的带动下沿第一方向运动。第一缓冲件248的数量为两个,沿第一方向分别设于第一滑台244的两侧,第一缓冲件248具有弹性,为第一滑台244沿第一方向运动过度时提供缓冲力。
171.可以理解地,在其他的实施例中,第一滑台244和第一缓冲件248可以省略,如此,第一滑动座247与移动壳体231直接连接。
172.第一传动件243和第一滑动座247大致可以为滚珠丝杠结构,第一驱动件245可以为伺服电机,第一传动件243通过轴承结构与第一壳体241可转动地连接,第一缓冲件248可以为由橡胶材料制成的弹性件。可以理解地,第一缓冲件248还可以为弹簧等具有弹性的部
件,第一滑块246的数量还可以为两个、三个、五个、六个或更多个。
173.可以理解地,在其他的实施例中,第一移动组件24还可以为直线气缸机构,移动壳体231与第一移动组件24的输出端连接。如此,第一移动组件24仍然能够实现移动补偿组件23沿第一方向移动。
174.在一些实施例中,第二移动组件25可以包括第二壳体251、第二导轨252、第二传动件253、第二滑台254、第二驱动件255、第二滑块256、第二滑动座257和第二缓冲件258。
175.第二壳体251用于容纳承载第二导轨252、第二传动件253、第二滑台254、第二驱动件255、第二滑块256、第二滑动座257和第二缓冲件258,第二壳体251可作为固定装置20的支撑结构。第二导轨252的数量为两个,两个第二导轨252相对设于第二壳体251内且均沿第二方向延伸,第二滑块256的数量为四个,两两设于一个第二导轨252上。第二传动件253设于第二壳体251内且位于两个第二导轨252之间,第二传动件253沿第二方向延伸。第二滑动座257滑动地设于第二传动件253上。第二驱动件255与第二传动件253的一端连接,第二驱动件255用于驱动第二传动件253转动,从而使得第二滑动座257沿第二传动件253运动,即使得第二滑动座257沿第二方向运动。第二滑台254大致为板状,第二滑台254的一侧与第二滑动座257及第二滑块256连接,第二滑台254在第二滑动座257的带动下沿第二方向运动。第二滑台254的另一侧与第一壳体241连接,如此,使得第一移动组件24在第二滑台254的带动下沿第二方向运动。第二缓冲件258的数量为两个,沿第二方向分别设于第二滑台254的两侧,第二缓冲件258具有弹性,为第二滑台254沿第二方向运动过度时提供缓冲力。
176.可以理解地,在其他的实施例中,第二滑台254和第二缓冲件258可以省略,如此,第二滑动座257与第一壳体241直接连接。
177.第二传动件253和第二滑动座257大致可以为滚珠丝杠结构,第二驱动件255可以为伺服电机,第二传动件253通过轴承结构与第二壳体251可转动地连接,第二缓冲件258可以为由橡胶材料制成的弹性件。可以理解地,第二缓冲件258还可以为弹簧等具有弹性的部件,第二滑块256的数量还可以为两个、三个、五个、六个或更多个。
178.可以理解地,在其他的实施例中,第二移动组件25还可以为直线气缸机构,第一壳体241与第二移动组件25的输出端连接。如此,第二移动组件25仍然能够实现第一移动组件24沿第二方向移动。
179.请参见图9,在一些实施例中,抛光装置10还可以包括驱动组件12及第三移动组件13。
180.驱动组件12与控制器耦接并与抛光组件11连接,驱动组件12用于带动抛光组件11沿一轴向旋转,以调节抛光组件11相对工件200的抛光角度。第三移动组件13与控制器耦接并与驱动组件12连接,第三移动组件13用于带动驱动组件12和抛光组件11沿与第一方向和第二方向不同的第三方向移动,以使抛光组件11靠近或远离工件200。其中,第三方向为如图9所示的z轴方向,第三方向与第一方向和第二方向相垂直。
181.在一些实施例中,抛光装置10还可以包括承载件14和支架15。
182.抛光组件11设于承载件14上,抛光组件11为动态设置可以理解为抛光组件11相对于承载件14可运动以对工件200进行抛光。承载件14可转动地设于支架15上且与驱动组件12传动连接,驱动组件12与支架15连接并可驱动承载件14沿一轴向旋转,从而使得抛光组件11沿一轴向旋转,即控制器控制驱动组件12驱动承载件14旋转,从而带动抛光组件11旋
转。支架15与第三移动组件13连接,支架15在第三移动组件13的驱动下带动驱动组件12、承载件14及抛光组件11沿第三方向移动。其中,轴向可以理解为承载件14的轴线。
183.可以理解地,在其他的实施例中,抛光组件11的数量还可以为两个、三个或更多个,两个、三个或更多个抛光组件11设于承载件14的不同表面上,以实现不同表面的抛光组件11对工件200进行抛光,减少单一抛光组件11的磨损,有利于提升抛光设备100的使用寿命。
184.在一些实施例中,第三移动组件13可以包括第三壳体131、第三导轨132、第三传动件133、第三滑台134、第三驱动件135、第三滑块136、第三滑动座137和第三缓冲件138。
185.第三壳体131用于容纳承载第三导轨132、第三传动件133、第三滑台134、第三驱动件135、第三滑块136、第三滑动座137和第三缓冲件138,第三壳体131可作为抛光装置10的支撑结构。第三导轨132的数量为两个,两个第三导轨132相对设于第三壳体131内且均沿第三方向延伸,第三滑块136的数量为四个,两两设于一个第三导轨132上。第三传动件133设于第三壳体131内且位于两个第三导轨132之间,第三传动件133沿第三方向延伸。第三滑动座137滑动地设于第三传动件133上。第三驱动件135与第三传动件133的一端连接,第三驱动件135用于驱动第三传动件133转动,从而使得第三滑动座137沿第三传动件133运动,即使得第三滑动座137沿第三方向运动。第三滑台134大致为板状,第三滑台134的一侧与第三滑动座137及第三滑块136连接,第三滑台134在第三滑动座137的带动下沿第三方向运动。第三滑台134的另一侧与支架15连接,如此,使得支架15在第三滑台134的带动下沿第三方向运动。第三缓冲件138的数量为两个,沿第三方向分别设于第三滑台134的两侧,第三缓冲件138具有弹性,为第三滑台134沿第三方向运动过度时提供缓冲力。
186.可以理解地,在其他的实施例中,第三滑台134和第三缓冲件138可以省略,如此,第三滑动座137与支架15直接连接。
187.第三传动件133和第三滑动座137大致可以为滚珠丝杠结构,第三驱动件135可以为伺服电机,第三传动件133通过轴承结构与第三壳体131可转动地连接,第三缓冲件138可以为由橡胶材料制成的弹性件。可以理解地,第三缓冲件138还可以为弹簧等具有弹性的部件,第三滑块136的数量还可以为两个、三个、五个、六个或更多个。
188.可以理解地,在其他的实施例中,第三移动组件13还可以为直线气缸机构,支架15与第三移动组件13的输出端连接。如此,第三移动组件13仍然能够实现支架15沿第三方向移动。
189.一些实施例提供的抛光设备100,通过旋转机构21、感应器22、移动补偿组件23、第一移动组件24、第二移动组件25、控制器、驱动组件12、第三移动组件13之间相互配合,使得抛光组件11与工件200之间的作用力能够进行自动补偿调节,使抛光组件11与工件200之间的作用力属于预设范围内,抛光组件11对工件200的抛光量均匀,能够保证工件200的抛光品质,进一步提升工件200的生产效率。
190.请参见图10,本技术一些实施例还提供一种抛光方法,用于控制一抛光设备100对工件200进行抛光。示例性地,该抛光设备100为上述实施例提供的抛光设备100,但不限于此。以工件200为手机边框为例进行说明,手机边框包括长边、短边以及连接长边和短边的圆弧角,对手机边框进行抛光时,需要对手机边框的长边、短边、圆弧角均进行抛光。根据不同的需求,流程图中步骤的顺序可以改变,某些步骤可以省略。为了便于说明,仅示出了与
本技术一些实施例相关的部分。抛光方法包括如下步骤。
191.s10,控制工件200旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以使工件200相对抛光设备100中的抛光组件11移动进行抛光。
192.示例性地,控制器控制旋转机构21带动工件200旋转、第一移动组件24带动工件200沿第一方向移动、第二移动组件25带动工件200沿第二方向移动和移动补偿组件23带动旋转机构21补偿移动中至少之一,使得工件200的长边、短边及圆弧角相对抛光组件11移动摩擦而进行抛光,同时还能够对工件200和抛光组件11之间的作用力进行自动补偿调节,确保工件200的抛光品质。其中,抛光组件11为动态设置,移动补偿的方向包括第一方向和第二方向,还可以包括由第一方向和第二方向所合成的方向,但不限于此。
193.可以理解地,在其他的实施方式中,抛光组件11也可以为静态设置。
194.在一些实施例中,步骤s10之前还可以包括步骤s2-步骤s4。
195.s2,控制工件200移动至与抛光组件11相对应的初始位置,并使工件200抵触抛光组件11。
196.示例性地,控制器控制固定装置20的旋转机构21、第一移动组件24和第二移动组件25中至少之一移动,以使手机边框的长边与抛光组件11相抵触,且该长边与抛光组件11相抵触的位置为靠近相应圆弧角的一端。需要说明的是,初始位置即为手机边框的长边靠近相应圆弧角的一端与抛光组件11相抵触的空间位置。
197.可以理解地,在其他的实施方式中,初始位置还可以为手机边框的短边靠近相应圆弧角的一端与抛光组件11相抵触的空间位置。
198.s4,控制抛光组件11转动,以调节抛光组件11相对工件200的抛光角度。
199.示例性地,控制器控制驱动组件12带动抛光组件11沿一轴向转动,以调节抛光组件11相对工件200的抛光角度,使得抛光组件11更符合于工件200的表面。
200.可以理解地,在其他的实施方式中,步骤s4可以省略,步骤s4也可以位于步骤s10之后。
201.在一些实施例中,步骤s10之后还可以包括步骤s20-步骤s30。
202.s20,获取工件200抵触抛光组件11时受到的作用力。
203.示例性地,控制器控制感应器22获取工件200抵触抛光组件11时所受到的作用力,感应器22并将所感应到的作用力信号传输至控制器。控制器判断该作用力是否属于预设范围。感应器22感应工件200所受到的作用力为f,作用力f可由水平方向的作用力fx和垂直方向的作用力fz合成,fx=fcosα,fz=fsinα,也可以理解为工件200所受到的水平方向的作用力为fx,垂直方向的作用力为fz,α为抛光组件11相对于工件200的预设角度,范围为0
°‑
90
°
。示例性地,工件200与抛光组件11之间的水平方向的作用力范围为fx
′
,垂直方向的作用力范围为fz
′
时,表示工件200与抛光组件11之间的作用力属于预设范围。然而,当fx大于或小于fx
′
,fz大于或小于fz
′
时,均表示工件200与抛光组件11之间的作用力不属于预设范围,抛光设备100需要进行补偿。
204.若为是,则表明该作用力属于预设范围,抛光组件11对工件200的抛光量符合要求,则继续执行步骤s10。
205.若为否,则表明该作用力不属于预设范围,执行步骤s30。
206.s30,控制工件200进行补偿移动,以使作用力属于预设范围内。
207.示例性地,控制器控制移动补偿组件23带动工件200移动以进行补偿移动。当该作用力偏大时,控制器控制移动补偿组件23带动工件200朝远离抛光组件11的方向移动,以使该作用力减小至预设范围内;反之,当该作用力偏小时,控制器控制移动补偿组件23带动工件200朝靠近抛光组件11的方向移动,以使该作用力增大至预设范围内。
208.在一些实施例中,若为否,还可以执行步骤s40。
209.s40,控制抛光组件11沿与第一方向和第二方向不同的第三方向移动,以使作用力属于预设范围内。
210.示例性地,控制器控制第三移动组件13带动抛光组件11沿第三方向移动,以使抛光组件11靠近或远离工件200,以使该作用力属于预设范围内。
211.可以理解地,步骤s30和步骤s40也可以同时执行,通过执行步骤s30和步骤s40,使得工件200与抛光组件11之间的作用力在任何方向上均可以实现自动补偿,有利于提升抛光设备100的适用性。
212.请参见图11,在一些实施例中,步骤s10具体可以包括如下步骤s102-步骤s110。
213.s102,控制工件200沿第一方向移动第一预设距离,以使工件200沿第一方向相对抛光组件11移动进行抛光。
214.示例性地,控制器控制第一移动组件24带动工件200沿第一方向移动第一预设距离,使得工件200的长边相对于抛光组件11移动摩擦以进行抛光,从而对工件200的长边进行抛光。其中,第一预设距离可以为长边的长度。
215.s104,控制工件200旋转第一预设角度,并沿第一方向和第二方向中至少之一移动,第二方向与第一方向非同向,以使工件200旋转时相对抛光组件11移动进行抛光。
216.示例性地,控制器控制旋转机构21带动工件200旋转第一预设角度,并控制第一移动组件24带动工件200沿第一方向和控制第二移动组件25带动工件200沿第二方向中至少之一移动,使得工件200在旋转的同时,工件200的圆弧角相对抛光组件11移动摩擦以进行抛光。其中,第一预设角度可以为90
°
。可以理解地,旋转机构21带动工件200旋转第一预设角度后,工件200的短边靠近抛光后的圆弧角的一端与抛光组件11相抵触。
217.s106,控制工件200沿第一方向移动第二预设距离,以使工件200沿第一方向相对抛光组件11移动进行抛光。
218.示例性地,控制器控制第一移动组件24带动工件200沿第一方向移动第二预设距离,使得工件200的短边相对抛光组件11移动摩擦以进行抛光,从而对工件200的短边进行抛光。其中,第二预设距离可以为短边的长度。
219.s108,控制工件200旋转第二预设角度,并沿第一方向和第二方向中至少之一移动,以使工件200旋转时相对抛光组件11移动进行抛光,并回到初始位置。
220.示例性地,控制器控制旋转机构21带动工件200旋转第二预设角度,并控制第一移动组件24带动工件200沿第一方向和控制第二移动组件25带动工件200沿第二方向中至少之一移动,使得工件200在旋转的同时,工件200的另一圆弧角相对抛光组件11移动摩擦以进行抛光。其中,第二预设角度可以为90
°
。可以理解地,旋转机构21带动工件200旋转第二预设角度后,工件200的长边靠近抛光后的圆弧角的一端与抛光组件11相抵触,可以理解为工件200回到初始位置。
221.s110,控制工件200沿补偿移动的方向移动补偿预设距离,以使工件200抵触工件
200时所受到的作用力属于预设范围内。
222.示例性地,当感应器22所感应到的作用力超过预设范围时,控制器控制移动补偿组件23带动工件200沿补偿移动的方向移动补偿预设距离,使得工件200与抛光组件11之间相互靠近或远离,以使工件200抵触工件200时所受到的作用力属于预设范围内。
223.可以理解地,由于感应器22实时感应工件200与抛光组件11之间的作用力,步骤s110和步骤s102、步骤s104、步骤s106、步骤s108可以同步执行,也可以在任意两个步骤之间执行。
224.一些实施例提供的抛光方法,通过控制工件200旋转、沿第一方向移动、沿第二方向移动和补偿移动中至少之一,以使工件200相对抛光设备100中的抛光组件11移动进行抛光;通过获取工件200抵触抛光组件11时受到的作用力,使得抛光组件11与工件200之间的作用力能够进行自动补偿调节,使抛光组件11对工件200的抛光量均匀,有利于提升工件200的抛光品质和生产效率;通过控制抛光组件11转动以调节抛光组件11相对工件200的抛光角度,有利于对工件200的仿形表面进行抛光作业。
225.对于本领域技术人员而言,显然本技术不限于上述示范性实施例的细节,而且在不背离本技术的精神或基本特征的情况下,能够以其他的具体形式实现本技术。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本技术的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本技术内。
226.最后应说明的是,以上实施例仅用于说明本技术的技术方案而非限制,尽管参照较佳实施例对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。