一种智能采集并传输自然环境指数的vr装置
技术领域
1.本发明涉及vr装置技术领域,特别涉及一种智能采集并传输自然环境指数的vr装置。
背景技术:
2.虚拟现实技术(vr)是仿真技术的一个重要方向,虚拟现实技术(vr)主要包括模拟环境、感知、自然技能和传感设备等方面,模拟环境是由计算机生成的、实时动态的三维立体逼真图像,自然技能是指人的头部转动,眼睛、手势、或其他人体行为动作,由计算机来处理与参与者的动作相适应的数据,并对用户的输入作出实时响应,并分别反馈到用户的五官,感知是指理想的vr应该具有一切人所具有的感知,如计算机图形技术所生成的视觉感知;实现元宇宙的沉浸式体验和使用交互;
3.目前绝大多数的虚拟现实技术(vr)仅仅只包括视觉和听觉感知,导致用户身临其境的环境体验感下降。
技术实现要素:
4.本发明提供一种智能采集并传输自然环境指数的vr装置,用以解决目前绝大多数的虚拟现实技术(vr)仅仅只包括视觉和听觉感知,导致用户身临其境的环境体验感下降的技术问题。
5.为解决上述技术问题,本发明公开了一种智能采集并传输自然环境指数的vr装置,包括vr一体机和环境检测组件,所述vr一体机上设有全景相机和环境检测组件,所述环境检测组件用于采集环境数据,且所述环境检测组件通过网络传输将采集到的环境数据传输到云端。
6.优选的,所述环境检测组件包括设置在所述vr一体机上的温湿度采集组件,所述温湿度采集组件包括温度传感器和湿度传感器,所述温度传感器用于采集环境温度,并将环境温度信息传输到所述云端,所述湿度传感器用于采集环境湿度,并将环境湿度信息传输到所述云端。
7.优选的,所述环境检测组件包括设置在所述vr一体机上的气压海拔采集组件,所述气压海拔采集组件包括气压传感器和海拔传感器,所述气压传感器用于采集环境气压,并将环境气压信息传输到所述云端,所述海拔传感器用于采集环境海拔信息,并将环境海拔信息传输到所述云端。
8.优选的,所述环境检测组件还包括:
9.环境气味识别系统,所述环境气味识别系统包括环境信息采集组件和信息处理装置,所述信息处理装置与所述环境信息采集组件、所述全景相机和所述云端电连接;
10.所述环境信息采集组件用于采集环境气味信息并将采集到的气味信息传输给所述信息处理装置;
11.所述信息处理装置用于接收所述环境信息采集组件采集的环境气味信息和所述
全景相机采集的环境图像,将所述环境气味信息与所述环境图像信息结合分析出环境气味的组分,并将所述环境气味的组分传输到所述云端。
12.优选的,所述环境检测组件包括音频采集器,所述音频采集器用于采集环境音频,并将所述音频信息传输到所述云端,所述音频采集器为高保真拾音麦克风。
13.优选的,所述环境检测组件还包括光传感器、风力风向传感器和雨量传感器种的一种或多种,所述光传感器用于采集环境的光强信息,并将所述光强信息传输给所述云端,所述风力风向传感器用于采集环境的风力和风向信息,并将风力和风向信息传输给所述云端,所述雨量传感器用于采集环境降雨量信息,并将环境降雨量信息传输给所述云端。
14.优选的,所述网络传输为4g、5g和wifi传输中的一种或多种。
15.优选的,所述vr一体机上铰链连接有全景相机安装体,所述全景相机安装在所述全景相机安装体上,所述全景相机内设有第一蜗杆安装槽,所述全景相机安装体内设有第二蜗杆安装槽,所述第二蜗杆安装槽内安装有蜗杆,且垂直于所述蜗杆轴向方向转动连接有转轴,所述转轴上键连接有蜗轮,所述蜗轮与所述蜗杆相互啮合,所述蜗轮对应的转轴上设有第一驱动件,所述第一驱动件用于驱动所述转轴转动,所述全景相机的摄像头可旋转。
16.优选的,所述vr一体机顶部螺栓可拆卸连接有导热机构,所述导热机构包括导热壳体,所述导热壳体顶部开设有防尘对流口,所述导热壳体底部开设有导热口,所述导热壳体内设有两对称布置的导热主体;
17.所述导热主体包括第一转轴架和第二转轴架,所述第一转轴架和所述第二转轴架均安装在所述导热壳体侧壁,所述第一转轴架上转动连接有第一转轴,所述第一转轴上设有第二驱动件,所述第二驱动件用于驱动所述第一转轴转动,所述第一转轴上键连接有第一带轮和转盘,所述转盘上设有第一短杆,所述第二转轴架上转动连接有第二转轴,所述第二转轴上键连接有第二带轮和第三带轮,所述第一带轮和所述第二带轮之间设有第一传送带,所述第一传送带与所述第一带轮和所述第二带轮摩擦连接,所述导热壳体内壁转动连接有第三转轴,所述第三转轴上键连接有第四带轮和驱动凸轮,所述第三带轮和所述第四带轮之间设有第二传送带,所述第二传送带与所述第三带轮和所述第四带轮摩擦连接,所述导热壳体内壁顶部设有l型导架,所述l型导架上设有通孔,所述通孔内套设有驱动杆,所述驱动杆上套设有导块,所述l型导架上开设有导槽,所述导块滑动连接在所述导槽内,所述驱动杆位于所述导块和所述l型导架之间的部分套设有接触弹性件,所述驱动杆靠近所述驱动凸轮的一端转动连接有滚轮,所述驱动杆远离所述滚轮的一端固定连接有驱动齿条,所述导热壳体内壁顶部固定连接有第四转轴架和第五转轴架,所述第四转轴架和所述第五转轴架上转动连接有第四转轴和第五转轴,所述第四转轴上键连接有驱动齿轮和第一绕线轮,所述第五转轴上键连接有第二绕线轮,所述导热壳体上设有支撑台,所述支撑台的安装腔内滑动连接有导向杆,所述导向杆上设有限位圆台和弹性件,所述第一绕线轮上缠绕有绕线,所述绕线依次跨过所述第二绕线轮与所述导向杆连接,所述导向杆远离所述绕线的一端铰链连接有连杆,所述支撑台底部铰链连接有扇动板,所述连杆远离所述导向杆的一端与所述扇动板铰链连接;
18.所述导热壳体内壁底部设有第六转轴架,所述第六转轴架上设有第六转轴,所述第六转轴上转动连接有槽轮,所述槽轮上设有第二短杆,所述第二短杆滑动连接在所述l型活动台的滑槽内,所述槽轮上的轮槽与所述转盘上的所述第一短杆相互配合拨动所述槽轮
转动,所述l型活动台固定连接有倾斜布置的导流板,所述l型活动台底部固定连接有活动台滑块,所述活动台滑块左右滑动连接在所述导热壳体内壁底部。
19.优选的,所述vr一体机上铰链连接有全景相机安装体,所述全景相机安装在所述全景相机安装体上,所述全景相机安装体通过绑带连接有绑带调节组件;
20.所述绑带调节组件包括调节组件壳体,所述调节组件壳体内设有驱动机构和两调节组件主体,所述驱动机构用于驱动两所述调节组件主体运动;
21.所述驱动机构包括调节主轴,所述调节主轴上键连接有椭圆体和手动调节轮;
22.所述调节组件主体包括安装腔壳体,所述安装腔壳体内上设有第一导孔,所述第一导孔内滑动连接有绑带调节齿条,所述绑带调节齿条内为中空,且其内套设有伸缩导杆,所述伸缩导杆固定连接在所述安装腔壳体内,所述伸缩导杆上套设有第一缓冲弹性件,所述绑带调节齿条位于所述安装腔壳体外的一端固定连接有弧形块,所述安装腔壳体内转动连接有两对称布置的第一调节转轴和第二调节转轴,所述第一调节转轴上键连接有调节齿轮和第一调节绕线轮,所述第二调节转轴上键连接有第二调节绕线轮,所述调节齿轮与所述绑带调节齿条相互啮合,所述安装腔壳体上开设有两对称布置的穿线孔,所述第一调节绕线轮上缠绕有调节绕线,所述调节绕线依次跨过所述第二调节绕线轮穿过所述穿线孔,所述调节绕线远离所述穿线孔的一端固定连接有绑带夹具体,所述绑带夹具体上固定连接有两对称布置的调节导向杆,所述安装腔壳体上设有两对称布置的调节导向孔,所述调节导向杆贯穿所述调节导向孔,所述调节导向杆位于所述安装腔壳体内的一端设有限位挡块,所述调节导向杆上位于所述安装腔壳体和所述绑带夹具体之间的部分套设有第二缓冲弹性件;
23.所述绑带夹具体内通过转轴转动连接有第一微调滚筒和第二微调滚筒,所述第一微调滚筒和所述第二微调滚筒之间夹有所述绑带,所述第一微调滚筒对应转轴上设有第三驱动件,所述第三驱动件用于驱动所述第一微调滚筒对应转轴转动,所述第一微调滚筒对应转轴上键连接有第一微调带轮,所述第二微调滚筒对应转轴上键连接有第二微调带轮,所述第一微调带轮和所述第二微调带轮之间设有微调传送带,所述微调传送带与所述第一微调带轮和所述第二微调带轮摩擦连接,所述第一微调滚筒和所述第二微调滚筒上均设有摩擦凸起。
24.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
25.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
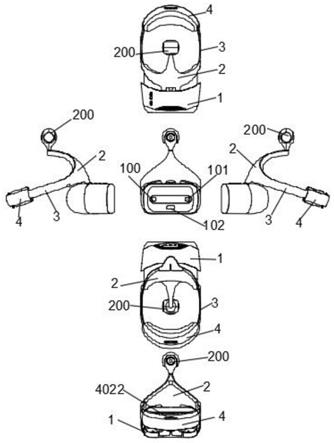
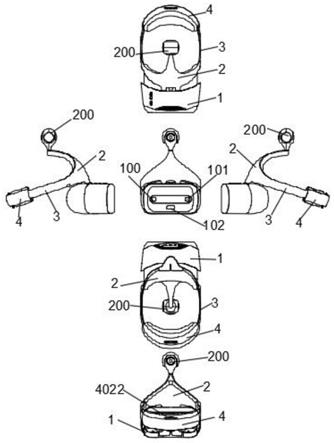
26.图1为本发明各个方位结构示意图。
27.图2为本发明的全景相机安装示意图。
28.图3为本发明的导热机构安装位置示意图。
29.图4为本发明的导热机构结构示意图。
30.图5为本发明的绑带调节组件的结构示意图。
31.图6为本发明调节组件主体结构示意图。
32.图7为本发明第一微调滚筒和第二微调滚筒安装结构示意图。
33.图中:1、vr一体机;100、温湿度采集组件;101、气压海拔采集组件;102、光传感器;2、全景相机安装体;200、全景相机;2000、第一蜗杆安装槽;2001、蜗杆;2002、第二蜗杆安装槽;2003、蜗轮;3、绑带;4、绑带调节组件;400、调节组件壳体;401、调节组件主体;4010、安装腔壳体;4011、第一导孔;4012、绑带调节齿条;4013、弧形块;4014、第一调节转轴;4015、第二调节转轴;4016、调节齿轮;4017、第一调节绕线轮;4018、穿线孔;4019、调节绕线;402、驱动机构;4020、调节主轴;4021、椭圆体;4022、手动调节轮;403、第二调节绕线轮;4030、绑带夹具体;4031、调节导向杆;4032、调节导向孔;4033、限位挡块;4034、第二缓冲弹性件;4035、伸缩导杆;4036、第一缓冲弹性件;4037、第一微调滚筒;4038、第二微调滚筒;4039、第二微调带轮;404、微调传送带;4040、摩擦凸起;4041、第一微调带轮;5、导热机构;500、导热壳体;5000、防尘对流口;5001、导热口;501、导热主体;5010、第一转轴架;5011、第一转轴;5012、第一带轮;5013、转盘;5014、第六转轴;5015、槽轮;5016、第二短杆;5017、l型活动台;5018、滑槽;5019、第一短杆;502、第二转轴架;5020、第二转轴;5021、第二带轮;5022、第三带轮;5023、第一传送带;5024、第三转轴;5025、第四带轮;5026、驱动凸轮;5027、第二传送带;5028、第五转轴;5029、驱动齿轮;503、l型导架;5030、通孔;5031、驱动杆;5032、导块;5033、导槽;5034、滚轮;5035、接触弹性件;5036、驱动齿条;5037、第四转轴架;5038、第五转轴架;5039、第四转轴;504、轮槽;5040、导流板;5041、活动台滑块;505、第一绕线轮;5050、第二绕线轮;5051、支撑台;5052、导向杆;5053、限位圆台;5054、安装腔;5055、弹性件;5056、绕线;5057、连杆;5058、扇动板;5059、第六转轴架。
具体实施方式
34.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
35.另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本发明,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案以及技术特征可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
36.本发明提供如下实施例。
37.实施例1
38.本发明实施例提供了一种智能采集并传输自然环境指数的vr装置,如图1
‑
7所示,包括vr一体机1和环境检测组件,所述vr一体机1上设有全景相机200和环境检测组件,所述环境检测组件用于采集环境数据,且所述环境检测组件通过网络传输将采集到的环境数据传输到云端。
39.优选的,所述环境检测组件包括设置在所述vr一体机1上的温湿度采集组件100,所述温湿度采集组件包括温度传感器和湿度传感器,所述温度传感器用于采集环境温度,并将环境温度信息传输到所述云端,所述湿度传感器用于采集环境湿度,并将环境湿度信息传输到所述云端。
40.优选的,所述环境检测组件包括设置在所述vr一体机1上的气压海拔采集组件101,所述气压海拔采集组件101包括气压传感器和海拔传感器,所述气压传感器用于采集环境气压,并将环境气压信息传输到所述云端,所述海拔传感器用于采集环境海拔信息,并将环境海拔信息传输到所述云端。
41.优选的,所述环境检测组件还包括:
42.环境气味识别系统,所述环境气味识别系统包括环境信息采集组件和信息处理装置,所述信息处理装置与所述环境信息采集组件、所述全景相机200和所述云端电连接;
43.所述环境信息采集组件用于采集环境气味信息并将采集到的气味信息传输给所述信息处理装置;
44.所述信息处理装置用于接收所述环境信息采集组件采集的环境气味信息和所述全景相机200采集的环境图像,将所述环境气味信息与所述环境图像信息结合分析出环境气味的组分,并将所述环境气味的组分传输到所述云端。
45.优选的,所述环境检测组件包括音频采集器,所述音频采集器用于采集环境音频,并将所述音频信息传输到所述云端,所述音频采集器为高保真拾音麦克风。
46.优选的,所述环境检测组件还包括光传感器102、风力风向传感器和雨量传感器种的一种或多种,所述光传感器用于采集环境的光强信息,并将所述光强信息传输给所述云端,所述风力风向传感器用于采集环境的风力和风向信息,并将风力和风向信息传输给所述云端,所述雨量传感器用于采集环境降雨量信息,并将环境降雨量信息传输给所述云端。
47.优选的,所述网络传输为4g、5g和wifi传输中的一种或多种。
48.上述技术方案的工作原理及有益效果为:所述环境检测组件的设计将多种环境采集传感器(如温度传感器、湿度传感器、海拔传感器、气压传感器、高保真拾音麦克风、光传感器等)集成于一体,形成即时多项环境数值并通过网络数据传输到云端,让接收端更身临其境的感受环境的气息,解决了目前绝大多数的虚拟现实技术(vr)仅仅只包括视觉和听觉感知,导致用户身临其境的环境体验感下降的技术问题。
49.实施例2
50.在上述实施例1的基础上,所述vr一体机1上铰链连接有全景相机安装体2,所述全景相机200安装在所述全景相机安装体2上,所述全景相机200内设有第一蜗杆安装槽2000,所述全景相机安装体2内设有第二蜗杆安装槽2002,所述第二蜗杆安装槽2002内安装有蜗杆2001,且垂直于所述蜗杆2001轴向方向转动连接有转轴,所述转轴上键连接有蜗轮2003,所述蜗轮2003与所述蜗杆2001相互啮合,所述蜗轮2003对应的转轴上设有第一驱动件,所述第一驱动件用于驱动所述转轴转动,所述全景相机200的摄像头可旋转。
51.上述技术方案的工作原理及有益效果为:所述全景相机200工作时,当需要调节所述全景相机200的高度时所述第一驱动件驱动所述转轴转动,所述转轴转动带动所述蜗轮2003转动,所述蜗轮2003转动带动所述蜗杆2001上下移动,从而调节所述全景相机200的拍摄高度,同时全景相机200的摄像头可旋转保证了所述全景相机200的拍摄广度,提高了所述全景相机200的拍摄质量,保证了所述全景相机200图像采集的全面性。
52.实施例3
53.在实施例1或2的基础上,所述vr一体机1顶部螺栓可拆卸连接有导热机构5,所述导热机构5包括导热壳体500,所述导热壳体500顶部开设有防尘对流口5000,所述导热壳体
500底部开设有导热口5001,所述导热壳体500内设有两对称布置的导热主体501;
54.所述导热主体501包括第一转轴架5010和第二转轴架502,所述第一转轴架5010和所述第二转轴架502均安装在所述导热壳体500侧壁,所述第一转轴架5010上转动连接有第一转轴5011,所述第一转轴5011上设有第二驱动件,所述第二驱动件用于驱动所述第一转轴5011转动,所述第一转轴5011上键连接有第一带轮5012和转盘5013,所述转盘5013上设有第一短杆5019,所述第二转轴架502上转动连接有第二转轴5020,所述第二转轴5020上键连接有第二带轮5021和第三带轮5022,所述第一带轮5012和所述第二带轮5021之间设有第一传送带5023,所述第一传送带5023与所述第一带轮5012和所述第二带轮5021摩擦连接,所述导热壳体500内壁转动连接有第三转轴5024,所述第三转轴5024上键连接有第四带轮5025和驱动凸轮5026,所述第三带轮5022和所述第四带轮5025之间设有第二传送带5027,所述第二传送带5027与所述第三带轮5022和所述第四带轮5025摩擦连接,所述导热壳体500内壁顶部设有l型导架503,所述l型导架503上设有通孔5030,所述通孔5030内套设有驱动杆5031,所述驱动杆5031上套设有导块5032,所述l型导架503上开设有导槽5033,所述导块5032滑动连接在所述导槽5033内,所述驱动杆5031位于所述导块5032和所述l型导架503之间的部分套设有接触弹性件5035,所述驱动杆5031靠近所述驱动凸轮5026的一端转动连接有滚轮5034,所述驱动杆5031远离所述滚轮5034的一端固定连接有驱动齿条5036,所述导热壳体500内壁顶部固定连接有第四转轴架5037和第五转轴架5038,所述第四转轴架5037和所述第五转轴架5038上转动连接有第四转轴5039和第五转轴5028,所述第四转轴5039上键连接有驱动齿轮5029和第一绕线轮505,所述第五转轴5028上键连接有第二绕线轮5050,所述导热壳体500上设有支撑台5051,所述支撑台5051的安装腔5054内滑动连接有导向杆5052,所述导向杆5052上设有限位圆台5053和弹性件5055,所述第一绕线轮505上缠绕有绕线5056,所述绕线5056依次跨过所述第二绕线轮5050与所述导向杆5052连接,所述导向杆5052远离所述绕线5056的一端铰链连接有连杆5057,所述支撑台5051底部铰链连接有扇动板5058,所述连杆5057远离所述导向杆5052的一端与所述扇动板5058铰链连接;
55.所述导热壳体500内壁底部设有第六转轴架5059,所述第六转轴架5059上设有第六转轴5014,所述第六转轴5014上转动连接有槽轮5015,所述槽轮5015上设有第二短杆5016,所述第二短杆5016滑动连接在所述l型活动台5017的滑槽5018内,所述槽轮5015上的轮槽504与所述转盘5013上的所述第一短杆5019相互配合拨动所述槽轮5015转动,所述l型活动台5017固定连接有倾斜布置的导流板5040,所述l型活动台5017底部固定连接有活动台滑块5041,所述活动台滑块5041左右滑动连接在所述导热壳体500内壁底部。
56.上述技术方案的工作原理及有益效果为:当所述vr一体机1需要散热时,所述第二驱动件驱动所述第一转轴5011往复正反转,所述第一转轴5011往复正反转带动所述第一带轮5012往复正反转,所述第一带轮5012往复正反转在所述第一传送带5023的作用下带动所述第二带轮5021往复正反转,所述第二带轮5021往复正反转带动所述第二转轴5020往复正反转,所述第二转轴5020往复正反转带动所述第三带轮5022往复正反转,所述第三带轮5022往复正反转带动在所述第二带轮5021的作用下带动所述第四带轮5025往复正反转,所述第四带轮5025往复正反转带动所述驱动凸轮5026往复正反转,所述驱动凸轮5026往复正反转不断推动所述驱动杆5031左右运动,在所述驱动杆5031左右运动的过程中所述导块5032沿所述导槽5033左右滑动,所述接触弹性件5035的设计保证了所述滚轮5034与所述驱
动凸轮5026的接触状态,所述导块5032、所述导槽5033和所述通孔5030起到了导向的作用,使得所述驱动杆5031的运动更加稳定,所述驱动杆5031左右运动带动所述驱动齿轮5029转动,所述驱动齿轮5029转动带动所述第四转轴5039转动,所述第四转轴5039转动带动所述第一绕线轮505转动,所述第一绕线轮505转动带动所述第二绕线轮5050转动,所述第二绕线轮5050转动带动所述绕线5056拉动所述导向杆5052上下运动,所述导向杆5052上下运动带动所述连杆5057运动,使得所述扇动板5058绕其与所述支撑台5051的铰链点来回转动,从而带动空气流通,空气流通使得所述vr一体机1上的热量可以在空气流通的过程中被带走;
57.所述第一转轴5011往复正反转带动所述转盘5013往复正反转,所述转盘5013往复正反转在所述转盘5013的第一短杆5019和所述轮槽504的作用下带动所述槽轮5015往复正反转,所述槽轮5015往复正反转在所述第二短杆5016与所述l型活动台5017的滑槽5018相互配合下使得所述l型活动台5017左右滑动,所述l型活动台5017左右滑动带动所述导流板5040左右移动,两对称的所述导流板5040左右移动形成一个空气流通通道,相较于没有所述导流板5040的设计加快了所述导热壳体500内的热空气经所述防尘对流口5000与外界空气对流的速度,加快了所述导热机构5的导热效率使得所述vr一体机1可以快速得到降温,所述驱动凸轮5026、所述滚轮5034的设计使得所述扇动板5058绕其与所述支撑台5051的铰链点来回转动,实现了所述扇动板5058来回煽动动作的往复性,所述防尘对流口5000的设计避免了外界灰尘进入所述导热壳体500内,用所述扇动板5058代替传统的风扇散热,由于所述扇动板5058煽动幅度大,相较于风扇散热散热效率更高。
58.实施例4
59.在实施例1的基础上,所述vr一体机1上铰链连接有全景相机安装体2,所述全景相机200安装在所述全景相机安装体2上,所述全景相机安装体2通过绑带3连接有绑带调节组件4;
60.所述绑带调节组件4包括调节组件壳体400,所述调节组件壳体400内设有驱动机构402和两调节组件主体401,所述驱动机构402用于驱动两所述调节组件主体401运动;
61.所述驱动机构402包括调节主轴4020,所述调节主轴4020上键连接有椭圆体4021和手动调节轮4022;
62.所述调节组件主体401包括安装腔壳体4010,所述安装腔壳体4010内上设有第一导孔4011,所述第一导孔4011内滑动连接有绑带调节齿条4012,所述绑带调节齿条4012内为中空,且其内套设有伸缩导杆4035,所述伸缩导杆4035固定连接在所述安装腔壳体4010内,所述伸缩导杆4035上套设有第一缓冲弹性件4036,所述绑带调节齿条4012位于所述安装腔壳体4010外的一端固定连接有弧形块4013,所述安装腔壳体4010内转动连接有两对称布置的第一调节转轴4014和第二调节转轴4015,所述第一调节转轴4014上键连接有调节齿轮4016和第一调节绕线轮4017,所述第二调节转轴4015上键连接有第二调节绕线轮403,所述调节齿轮4016与所述绑带调节齿条4012相互啮合,所述安装腔壳体4010上开设有两对称布置的穿线孔4018,所述第一调节绕线轮4017上缠绕有调节绕线4019,所述调节绕线4019依次跨过所述第二调节绕线轮403穿过所述穿线孔4018,所述调节绕线4019远离所述穿线孔4018的一端固定连接有绑带夹具体4030,所述绑带夹具体4030上固定连接有两对称布置的调节导向杆4031,所述安装腔壳体4010上设有两对称布置的调节导向孔4032,所述调节
导向杆4031贯穿所述调节导向孔4032,所述调节导向杆4031位于所述安装腔壳体4010内的一端设有限位挡块4033,所述调节导向杆4031上位于所述安装腔壳体4010和所述绑带夹具体4030之间的部分套设有第二缓冲弹性件4034;
63.所述绑带夹具体4030内通过转轴转动连接有第一微调滚筒4037和第二微调滚筒4038,所述第一微调滚筒4037和所述第二微调滚筒4038之间夹有所述绑带3,所述第一微调滚筒4037对应转轴上设有第三驱动件,所述第三驱动件用于驱动所述第一微调滚筒4037对应转轴转动,所述第一微调滚筒4037对应转轴上键连接有第一微调带轮4041,所述第二微调滚筒4038对应转轴上键连接有第二微调带轮4039,所述第一微调带轮4041和所述第二微调带轮4039之间设有微调传送带404,所述微调传送带404与所述第一微调带轮4041和所述第二微调带轮4039摩擦连接,所述第一微调滚筒4037和所述第二微调滚筒4038上均设有摩擦凸起4040。
64.上述技术方案的工作原理及有益效果为:手动转动所述手动调节轮4022,所述手动调节轮4022转动带动所述调节主轴4020转动,所述调节主轴4020转动带动所述椭圆体4021转动,所述椭圆体4021转动由于所述椭圆体4021的周向上半径各部相同,推动所述弧形块4013运动,所述弧形块4013运动带动所述绑带调节齿条4012沿所述伸缩导杆4035左右滑动,所述第一缓冲弹性件4036的设计可保证所述弧形块4013始终与所述椭圆体4021接触,所述绑带调节齿条4012左右滑动带动所述调节齿轮4016转动,所述调节齿轮4016转动带动所述第一调节绕线轮4017转动,所述第一调节绕线轮4017转动在所述调节绕线4019的作用下带动所述第二调节绕线轮403转动,所述第二调节绕线轮403转动拉动所述绑带夹具体4030在所述调节导向杆4031和所述第二缓冲弹性件4034的共同作用下左右滑动,从而调节所述绑带3的长度,所述手动调节轮4022的设计使得用户可以根据自己的需求喜好自行进行绑带松紧调节,增加了所述vr装置的可适应性和用户兼容度;
65.当要对所述绑带3长度进行微调时,所述第三驱动件驱动所述第一微调滚筒4037对应转轴转动带动所述第一微调滚筒4037和所述第一微调带轮4041转动,所述第一微调带轮4041转动在所述微调传送带404的作用下带动所述第二微调带轮4039转动,所述第二微调带轮4039转动带动所述第二微调滚筒4038对应转轴转动,所述第二微调滚筒4038对应转轴转动带动所述第二微调滚筒4038转动,所述第一微调滚筒4037和所述第二微调滚筒4038转动在所述摩擦凸起4040的作用下所述绑带3被更多的卷入所述第一微调滚筒4037和所述第二微调滚筒4038之间或更多的卷出所述第一微调滚筒4037和所述第二微调滚筒4038之间使得所述绑带3的长度得以微调,所述绑带3的长度得以微调使得所述vr装置与用户的头围适配度更高,增加了用户的佩戴舒适感。
66.实施例5
67.在实施例1的基础上,还包括:
68.意外跌倒报警系统,所述意外跌倒报警系统设置在所述vr一体机(1)上,所述意外跌倒报警系统用于检测vr装置佩戴者的身体姿势信息,若vr装置佩戴者跌倒则所述意外跌倒报警系统定位并发送报警信息和所述vr装置佩戴者的位置信息至服务端;
69.所述意外跌倒报警系统包括:
70.跌倒检测单元,所述跌倒检测单元用于检测所述vr装置佩戴者的身体姿势信息,并根据所述身体姿势信息进行跌倒状态判断;
71.录音单元,所述录音单元用于对所述vr装置佩戴者进行录音,并将所述录音信息通过远程网络通讯模块发送至服务端;
72.定位单元,所述定位单元用于定位所述vr装置佩戴者的位置信息,并将所述位置信息通过远程网络通讯模块发送至服务端;
73.所述跌倒检测单元、所述录音单元和所述定位单元电连接,所述跌倒检测单元用于触发所述录音单元和所述定位单元工作;
74.所述跌倒检测单元包括:
75.三轴加速度器,所述三轴加速度器设置在所述vr一体机(1)上,用于检测vr装置佩戴者的运动状态加速度;
76.心率计,所述心率计设置在所述vr装置佩戴者手腕上,用于检测所述vr装置佩戴者的心率;
77.基于所述心率计和公式(1),计算所述vr装置佩戴者从i
‑
1时刻到i时刻的实际对数心率变化程度:
[0078][0079]
其中,γ
i
‑
γ
i
‑1为所述vr装置佩戴者从i
‑
1时刻到i时刻的实际对数心率变化程度,其中i从2开始,σ为所述心率计的检测误差系数,τ
i
为第i时刻所述心率计的检测值,τ
i
‑1为第i
‑
1时刻所述心率计的检测值,τ
max
为所述vr装置佩戴者的理论最大心率值,τ
min
为所述vr装置佩戴者的理论最小心率值,ln为以e为底的自然对数;
[0080]
基于所述跌倒检测单元计算所述vr装置佩戴者从i
‑
1时刻到i时刻的实际运动状态混乱系数:
[0081][0082][0083]
其中,为所述vr装置佩戴者从i
‑
1时刻到i时刻的实际运动状态混乱系数,γ
i
‑
γ
i
‑1为所述vr装置佩戴者从i
‑
1时刻到i时刻的实际对数心率变化程度,ε为所述三轴加速度器的检测误差系数,e为自然数,取值为2.71,以所述vr装置佩戴者腰部为坐标原点,其中vr装置佩戴者行进方向为x轴,所述vr装置佩戴者左侧方向为y轴,竖直向上为z轴建立所述三轴加速度器的坐标轴,β
1i
为第i时刻所述三轴加速度器x轴方向的加速度检测值,β
2i
为第i时刻所述三轴加速度器y轴方向的加速度检测值,β
3i
为第i时刻所述三轴加速度器z轴方向的加速度检测值,δ
i
为第i时刻所述三轴加速度器的平均加速度检测值,δ
i
‑1为第i
‑
1时刻所述三轴加速度器的平均加速度检测值;
[0084]
若所述vr装置佩戴者从i
‑
1时刻到i时刻的实际对数心率变化程度大于所述vr装置佩戴者从i
‑
1时刻到i时刻的预设对数心率变化程度,或所述vr装置佩戴者从i
‑
1时刻到i时刻的实际运动状态混乱系数大于所述vr装置佩戴者从i
‑
1时刻到i时刻的预设运动状态混乱系数,则所述跌倒检测单元触发所述录音单元工作,通过所述录音单元获得所述vr装
置佩戴者本人的语音信息对所述vr装置佩戴者的跌倒情况进行核对,若所述vr装置佩戴者跌倒则触发所述定位单元工作将所述vr装置佩戴者的位置信息通过远程网络通讯模块发送至服务端;
[0085]
上述技术方案的工作原理及有益效果为:假设i=2,σ=0.88,τ2=90次/分,τ1=100次/分,τ
max
=120次/分,τ
min
=70次/分,计算得γ2‑
γ1=1.70;
[0086]
假设β
12
=3.81m/s2,β
222
=2.21m/s2,β
323
=4.56m/s2,得δ2=6.34m/s2,β
11
=2.81m/s2,β
212
=1.21m/s2,β
313
=3.56m/s2,得δ1=4.69m/s2,设ε=0.92,得
[0087]
假设所述vr装置佩戴者从i
‑
1时刻到i时刻的预设对数心率变化程度为1.0,所述vr装置佩戴者从i
‑
1时刻到i时刻的预设运动状态混乱系数为1.8,则此时所述跌倒检测单元触发所述录音单元工作,通过所述录音单元获得所述vr装置佩戴者本人的语音信息对所述vr装置佩戴者的跌倒情况进行核对,若所述vr装置佩戴者跌倒则触发所述定位单元工作将所述vr装置佩戴者的位置信息通过远程网络通讯模块发送至服务端,由于所述vr装置的采集环境多数为恶劣环境,为所述vr装置佩戴者的生命安全造成一定的威胁,所述意外跌倒报警系统得设计保证了所述vr装置佩戴者在跌倒或心率有重大变化时实现远程报警,保证了所述vr装置佩戴者的生命安全。
[0088]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。