1.本实用新型涉及超声检查技术领域,尤其涉及一种基于视觉定位的超声检查机器人。
背景技术:
2.在对包括外周动脉治疗在内的腿部动脉进行介入治疗时,需要使用基于超声图像的导管导航系统。在此过程中,超声医师需引导超声探头跟随人体动脉以向医生显示导管在动脉内的位置以引导导管,在此情况下,医生需同时操作超声探头和医用导管以引导导管的介入过程,操作麻烦,耗时耗力,因此,亟需一种能自动向医生反馈超声图像的超声检查机器人。
技术实现要素:
3.本实用新型的目的是提供一种基于视觉定位的超声检查机器人,该超声检查机器人设有第一视觉定位机构和第二视觉定位机构,通过两者的相互配合,可自动反馈待检查部位的超声图像信息,以及时调整机械臂和超声探头的位姿,保证超声探头与待检查部位接触紧密,进而提高检查精度及检查效率,同时,超声探头与安装槽可拆卸式连接,便于拆卸更换不同类型的超声探头,维护方便,此外,可根据实际使用需求,自由设置视觉定位组件的数量,以满足不同的使用环境,通用性强。
4.为实现上述目的,采用以下技术方案:
5.一种基于视觉定位的超声检查机器人,包括第一视觉定位机构、机械臂、安装于机械臂上的六轴力传感器、安装于机械臂并与六轴力传感器连接的安装底座、安装于安装底座上的超声探头,以及安装于安装底座并围绕超声探头布置的第二视觉定位机构;所述第一视觉定位机构用于获取待检查部位的整体图像信息,第二视觉定位机构用于获取待检查部位的局部图像信息并与整体图像信息进行匹配,以反馈超声探头及机械臂的位姿信息。
6.进一步地,所述安装底座包括安装于机械臂上的连接盘,以及布置于连接盘一侧并与其一体式连接的延伸座;所述延伸座的一端还开设有第一插槽,且第一插槽内还固定安装有连接座,超声探头安装于连接座上;所述延伸座的外壁在其周向上还间隔设有若干第一固定孔,第二视觉定位机构经第一固定孔安装于延伸座的外壁上。
7.进一步地,所述连接座的一端插设于第一插槽内,连接座的另一端端部周向上还间隔设有若干限位板;若干所述限位板之间围成一安装槽,超声探头可拆卸式安装于安装槽内。
8.进一步地,所述第二视觉定位机构包括若干视觉定位组件;若干所述视觉定位组件经第一固定孔间隔安装于延伸座的外壁上。
9.进一步地,所述视觉定位组件包括连接臂、定位相机;所述连接臂的一端经第一固定孔安装于延伸座外壁上,连接臂的另一端沿延伸座的轴向向下延伸布置;所述连接臂向下延伸的一端端部还开设有第二插槽,定位相机可拆卸式安装于第二插槽内。
10.采用上述方案,本实用新型的有益效果是:
11.该超声检查机器人设有第一视觉定位机构和第二视觉定位机构,通过两者的相互配合,可自动反馈待检查部位的超声图像信息,以及时调整机械臂和超声探头的位姿,保证超声探头与待检查部位接触紧密,进而提高检查精度及检查效率,同时,超声探头与安装槽可拆卸式连接,便于拆卸更换不同类型的超声探头,维护方便,此外,可根据实际使用需求,自由设置视觉定位组件的数量,以满足不同的使用环境,通用性强。
附图说明
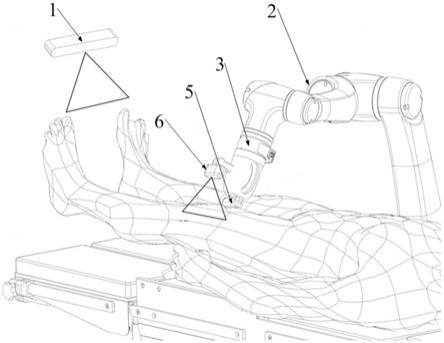
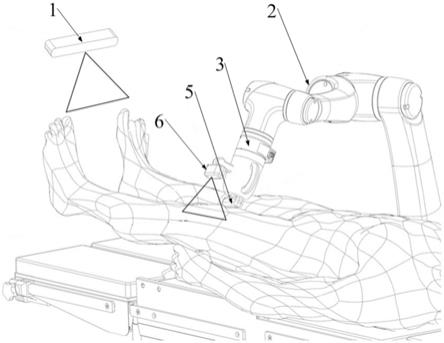
12.图1为本实用新型的立体图;
13.图2为本实用新型的安装底座、超声探头及第二视觉定位机构的立体图;
14.图3为图2的爆炸图;
15.其中,附图标识说明:
16.1—第一视觉定位机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—机械臂;
17.3—六轴力传感器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4—安装底座;
18.5—超声探头;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6—第二视觉定位机构;
19.41—连接盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42—延伸座;
20.43—第一插槽;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
44—连接座;
21.45—限位板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
46—安装槽;
22.61—连接臂;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62—定位相机。
具体实施方式
23.以下结合附图和具体实施例,对本实用新型进行详细说明。
24.参照图1至3所示,本实用新型提供一种基于视觉定位的超声检查机器人,包括第一视觉定位机构1、机械臂2、安装于机械臂2上的六轴力传感器3、安装于机械臂2并与六轴力传感器3连接的安装底座4、安装于安装底座4上的超声探头5,以及安装于安装底座4并围绕超声探头5布置的第二视觉定位机构6;所述第一视觉定位机构1用于获取待检查部位的整体图像信息,第二视觉定位机构6用于获取待检查部位的局部图像信息并与整体图像信息进行匹配,以反馈超声探头5及机械臂2的位姿信息。
25.其中,所述安装底座4包括安装于机械臂2上的连接盘41,以及布置于连接盘41一侧并与其一体式连接的延伸座42;所述延伸座42的一端还开设有第一插槽43,且第一插槽43内还固定安装有连接座44,超声探头5安装于连接座44上;所述延伸座42的外壁在其周向上还间隔设有若干第一固定孔,第二视觉定位机构6经第一固定孔安装于延伸座42的外壁上;所述连接座44的一端插设于第一插槽43内,连接座44的另一端端部周向上还间隔设有若干限位板45;若干所述限位板45之间围成一安装槽46,超声探头5可拆卸式安装于安装槽46内;所述第二视觉定位机构6包括若干视觉定位组件;若干所述视觉定位组件经第一固定孔间隔安装于延伸座42的外壁上;所述视觉定位组件包括连接臂61、定位相机62;所述连接臂61的一端经第一固定孔安装于延伸座42外壁上,连接臂61的另一端沿延伸座42的轴向向下延伸布置;所述连接臂61向下延伸的一端端部还开设有第二插槽,定位相机62可拆卸式安装于第二插槽内。
26.本实用新型工作原理:
27.继续参照图1至3所示,本实施例中,该超声检查机器人包括两个视觉定位机构,其中第一视觉定位机构1布置于患者的上方,第二视觉定位机构6安装于机械臂2上;实际工作时,用户首先通过外部的ct机构扫描输入患者需要检查部位的3d模型,3d模型可包含患者待检查部位的表面信息和内部的解剖结构信息,例如静脉血管,动脉血管等;随后使用第一视觉定位机构1,在手术期间连续实时获取患者待检查部位的3d图像信息,并与3d模型进行匹配,并将其匹配结果配准至机器人工作系统内;随后,使用第二视觉定位机构6获取患者待检查部位的局部图像信息,并将该局部图像信息与整体图像信息进行配准,生成匹配后的模型,以反馈超声探头5及机械臂2的位姿信息;采用了两次匹配的方式,可使得第二次匹配具有更多的曲面特征可以使用,使得其匹配更加快速准确。
28.同时,超声探头5的实时位置与方向可使用机械臂2位置反馈(经六轴力传感器3反馈)与上述第二次匹配的结果获得。借此,待检查部位的局部表面图像信息的匹配可以从已经获得的整体图像信息的对应位置附近开始。因此,将局部图像信息配准到整体图像信息的过程可以变得更快和更准确,借此配准结果,该机器人可以获得超声探头5的具体接触位置信息,该超声探头5在患者待检查部位上的位置信息可用于引导机械臂2跟随目标血管与血管中的导管。此外,了解超声探头5与患者待检查部位的具体接触位置使得对超声图像中的血管和导管的检查更为简单,这是因为可以从患者的ct扫描重建所得的3d模型中获得超声探头5扫描位置的解剖信息。
29.此外,该实施例中,机械臂2为主动式机械臂,可以主动将超声探头5移送至待检查部位处;第二视觉定位机构6的视觉定位组件的数量设置为四个,可根据实际使用环境,自由设置其数量,在此不作限制,视觉定位组件的连接臂61的所处的位置要高于超声探头5所处的位置,这样不会影响到正常的超声扫描流程;在超声扫描过程中,延伸座42外壁所连接的一个或多个视觉定位组件可对超声探头5与待检查部位的接触位置附近的局部表面结构进行重建,利用重建结果与第一视觉定位机构1所获取的结果进行匹配,为系统反馈接触信息,指引机械臂2调整接触方式与姿态,安装多个视觉定位组件的意义在于,当该超声机器人需要在某部位进行多角度往返探索检查时,不同侧面上的视觉定位组件可反馈不同方向上的局部表面图像信息,以指导机械臂2进行精准力控下的超声扫描;该实施例中,定位相机62可为结构光相机,双目视觉相机,光飞行时间法相机,光场相机等;超声探头5可拆卸式安装于安装槽46内,便于拆卸更换不同类型的超声探头5,维护方便。
30.以上仅为本实用新型的较佳实施例而已,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。