技术特征:
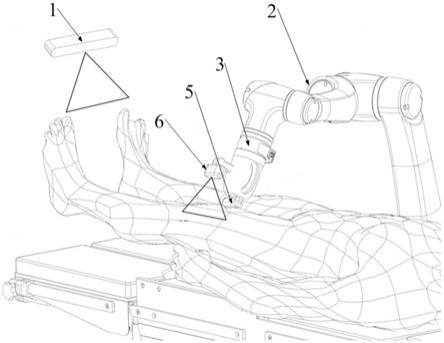
1.一种基于视觉定位的超声检查机器人,其特征在于,包括第一视觉定位机构、机械臂、安装于机械臂上的六轴力传感器、安装于机械臂并与六轴力传感器连接的安装底座、安装于安装底座上的超声探头,以及安装于安装底座并围绕超声探头布置的第二视觉定位机构;所述第一视觉定位机构用于获取待检查部位的整体图像信息,第二视觉定位机构用于获取待检查部位的局部图像信息并与整体图像信息进行匹配,以反馈超声探头及机械臂的位姿信息。2.根据权利要求1所述的基于视觉定位的超声检查机器人,其特征在于,所述安装底座包括安装于机械臂上的连接盘,以及布置于连接盘一侧并与其一体式连接的延伸座;所述延伸座的一端还开设有第一插槽,且第一插槽内还固定安装有连接座,超声探头安装于连接座上;所述延伸座的外壁在其周向上还间隔设有若干第一固定孔,第二视觉定位机构经第一固定孔安装于延伸座的外壁上。3.根据权利要求2所述的基于视觉定位的超声检查机器人,其特征在于,所述连接座的一端插设于第一插槽内,连接座的另一端端部周向上还间隔设有若干限位板;若干所述限位板之间围成一安装槽,超声探头可拆卸式安装于安装槽内。4.根据权利要求2所述的基于视觉定位的超声检查机器人,其特征在于,所述第二视觉定位机构包括若干视觉定位组件;若干所述视觉定位组件经第一固定孔间隔安装于延伸座的外壁上。5.根据权利要求4所述的基于视觉定位的超声检查机器人,其特征在于,所述视觉定位组件包括连接臂、定位相机;所述连接臂的一端经第一固定孔安装于延伸座外壁上,连接臂的另一端沿延伸座的轴向向下延伸布置;所述连接臂向下延伸的一端端部还开设有第二插槽,定位相机可拆卸式安装于第二插槽内。
技术总结
本实用新型公开一种基于视觉定位的超声检查机器人,包括第一视觉定位机构、机械臂、安装于机械臂上的六轴力传感器、安装于机械臂并与六轴力传感器连接的安装底座、安装于安装底座上的超声探头,以及安装于安装底座并围绕超声探头布置的第二视觉定位机构。本实用新型设有第一视觉定位机构和第二视觉定位机构,通过两者的相互配合,可自动反馈待检查部位的超声图像信息,以及时调整机械臂和超声探头的位姿,保证超声探头与待检查部位接触紧密,进而提高检查精度及检查效率,同时,超声探头与安装槽可拆卸式连接,便于拆卸更换不同类型的超声探头,此外,可根据实际使用需求,自由设置视觉定位组件的数量,以满足不同的使用环境,通用性强。用性强。用性强。
技术研发人员:鱼晨 白仲皖
受保护的技术使用者:华力创科学(深圳)有限公司
技术研发日:2021.07.16
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。