1.本发明涉及机器人技术领域,具体涉及一种球形足式两用机器人。
背景技术:
2.球形足式机器人是指一类驱动方式(偏心力矩驱动、角动量守恒驱动)位于球壳(或球体)内部,通过内驱动方式实现球体运动的机器人,来实现全向滚动能力。简单的说是通过修改内部重心位置,来进行滚动。球形足式机器人优势:可将所有部件包含在球体内,能实现一定密封性,在球体的保护下,不易受外的环境因素的影响导致失效。
3.目前球形足式机器人因只有滚动行走方式和通过修改内部重心驱动方式,所以无法在不平路面上运动运动,也无法越障碍,在斜坡、楼梯等障碍或凹凸不平路面的场地无法得到很好应用。由此可见,现有的球形足式机器人具有如下缺点:
4.1、运动稳定性不高,只能在平面的路面上行走,在凹凸路面上无法行走;
5.2、无越障碍、爬坡能力(斜坡、楼梯等);
6.3、无法实现原地稳定姿态角度调节;
7.4、在高速运动下,但遇到一点不平路面会导致内部钟摆驱动系统混乱。
技术实现要素:
8.本发明公开了一种球形足式两用机器人,其可以有效解决背景技术中涉及的技术问题。
9.为实现上述目的,本发明的技术方案为:
10.一种球形足式两用机器人,包括球形壳体、球形电机、骨架板、驱动电机以及多自由度支撑腿,所述球形壳体包括半球形的上半壳体和与所述上半壳体组合形成球状的半球形下半壳体,所述下半壳体包括多块可分离出去的子壳体,多块所述子壳体沿所述下半壳体的圆周向方向均匀间隔设置,所述球形电机通过所述骨架板安装于所述球形壳体的球心位置,所述驱动电机固设于所述骨架板上,每块所述子壳体分别通过所述多自由度支撑腿与所述驱动电机连接。
11.作为本发明的一种优选改进,所述子壳体数量为四块。
12.作为本发明的一种优选改进,所述骨架板呈椭圆形,且与所述上半壳体与所述下半壳体交接的平面重叠安装。
13.作为本发明的一种优选改进,所述球形电机包括球形电机壳和设置于所述球形电机壳内的转子,所述球形电机壳与所述骨架板固定,所述转子的重心大于该球形足式两用机器人的重量。
14.作为本发明的一种优选改进,所述多自由度支撑腿具有三个自由度。
15.作为本发明的一种优选改进,所述驱动电机和所述多自由度支撑腿的数量与所述子壳体的数量一致。
16.本发明的有益效果如下:通过在球形足式机器人上设置可伸出的子壳体作为支撑
腿的形式进行控制,在碰到障碍(凹凸不平路面、斜坡、楼梯)时,若球形形态无法通过,则变形伸出支撑腿进行移动,能够快速通过障碍,还可以在原地具有更好的调整姿态角度,从而能更好的适用在任何复杂环境下的应用场景适用。
附图说明
17.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
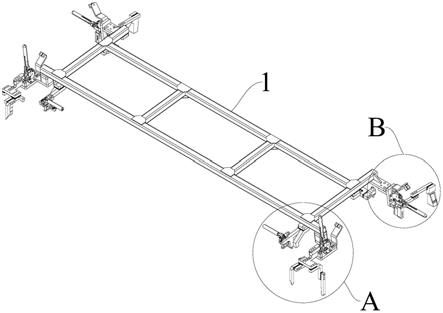
18.图1为本发明球形足式两用机器人的整体结构示意图;
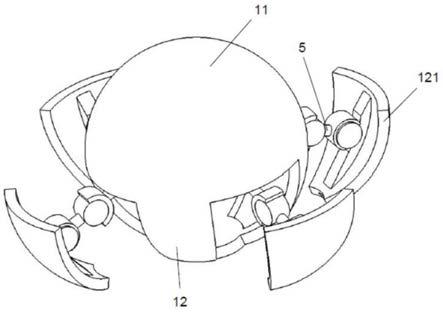
19.图2为本发明球形足式两用机器人的子壳体与多自由度支撑腿伸出后的结构示意图;
20.图3为本发明球形足式两用机器人的球形壳体剖视结构示意图;
21.图4为本发明球形足式两用机器人去掉球形壳体后的结构示意图。
具体实施方式
22.下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
23.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
24.另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
25.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
26.另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
27.请参阅图1
‑
4所示,本发明提供一种球形足式两用机器人,包括球形壳体1、球形电机2、骨架板3、驱动电机4以及多自由度支撑腿5,所述球形壳体1包括半球形的上半壳体11和与所述上半壳体11组合形成球状的半球形下半壳体12,所述下半壳体12包括多块可分离出去的子壳体121,多块所述子壳体121沿所述下半壳体12的圆周向方向均匀间隔设置,所
述子壳体121可作为机器人行走的支撑腿。
28.所述球形电机2通过所述骨架板3安装于所述球形壳体1的球心位置,具体的,所述球形电机2包括球形电机壳21和设置于所述球形电机壳21内的转子(未图示),所述球形电机壳21与所述骨架板3固定,所述转子的重心大于该球形足式两用机器人的重量。由于球形电机壳21与骨架板3固定,因此,当转子转动时,因转子的重心大于该球形足式两用机器人的重量,根据动量守恒,转子不动,球形电机壳21转动,因球形电机壳21与球形壳体1是固定连接,所以带动作整体的机器人进行滚动。
29.所述驱动电机4固设于所述骨架板3上,所述骨架板3呈椭圆形,且与所述上半壳体11与所述下半壳体12交接的平面重叠安装。
30.每块所述子壳体121分别通过所述多自由度支撑腿5与所述驱动电机4连接。所述驱动电机4和所述多自由度支撑腿5的数量与所述子壳体121的数量一致,进一步说明的是,在本发明的具体实施方式中,所述子壳体121数量为四块,四个所述驱动电机4环设于所述球形电机2的周侧,并且关于所述骨架板3的中心线对称设置。
31.在本发明的具体实施方式中,所述多自由度支撑腿5具有三个自由度,使得作为支撑腿的所述子壳体121可以灵活移动。当控制多条所述多自由度支撑腿5伸出时,球形电机2可以控制上半壳体11旋转,所述多自由度支撑腿5可控制下半壳体12旋转,这样,与球形电机2的配合实现下半壳体12运动,同时可保持上半壳体11稳定不动。可见,通过设置所述多自由度支撑腿5,不但可以控制球形足式机器人的移动,还可以调整姿态和角度,减少外部因素导致的晃动,并且,在高速移动过程中,通过控制所述多自由度支撑腿5来伸出子壳体121实现急速停止滚动。
32.本发明的有益效果如下:通过在球形足式机器人上设置可伸出的子壳体作为支撑腿的形式进行控制,在碰到障碍(凹凸不平路面、斜坡、楼梯)时,若球形形态无法通过,则变形伸出支撑腿进行移动,能够快速通过障碍,还可以在原地具有更好的调整姿态角度,从而能更好的适用在任何复杂环境下的应用场景适用。
33.尽管本发明的实施方案已公开如上,但并不仅仅限于说明书和实施方案中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里所示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。