1.本发明涉及电动车驾驶辅助技术领域,更具体涉及一种驾驶电动车辅助系统及其辅助方法。
背景技术:
2.电动车是国家规定的非机动车辆,因此只能在非机动车道行驶。而在我国大多数地区,非机动车道修建时没有考虑到以后电动车的发展,造成非机动车道狭窄。电动车在非机动车道的增加加剧了车道的拥挤状况,带来电动车在非机动车道的增加加剧了车道的拥挤状况,带来了更多的不安全因素。电动车设计存在严重超标现象。根据1999年我国出台的《中华人民共和国道路安全交通法》政策规定,电动自行车得时速不能超过20km/h。质量不得重于40kg。但是在实际中,生产厂家为了迎合消费者,增加自己的产业规模以及提高其产业利润,加大自己的竞争力,又进一步加大电动车的速度,甚至能够达到35km/h
‑‑
40km/h,而普通自行车的车速一般为5km/h
‑‑‑
20km/h,过快的行驶速度极易造成交通安全事故和交通冲突,交通安全事故率高。并且一些电动车的设计也严重超重,这就造成电动车在行驶的过程中车速过快,质量过大,冲击力大,严重威胁交通安全。
3.在全球关注绿色能源议题、环保相关议题下,低排放甚至零排放的电动车产业,将是未来交通运输设备发展的重点。但,由于目前的监管体系疲乏,电动车的广泛使用和热拥,电动车的时速过快,对驾驶者的生命存在极大的威胁以及对道路交通安全造成了阻碍。目前发条已规定,电动自行车上路行驶需要佩戴安全头盔,装备要齐全,检查刹车是否灵敏,但佩戴头盔对驾驶者来说不为存在一种更大的障碍,佩戴头盔的驾驶者与外局相对隔绝,视线范围极大缩小,对路线的选定存在干扰,同时对转向的视野存在一定遮蔽现象,为确保佩戴头盔成为趋势,急需要对驾驶系统进行改进。
技术实现要素:
4.本发明的目的在于公开一种驾驶电动车辅助系统及其辅助方法,能够提高行车安全,对驾驶者的行车作出智能化导向,弥补了驾驶者的操作缺陷。
5.为实现上述目的,本发明提供了一种驾驶电动车辅助系统及其辅助方法,包括:具有测速单元以及语音交互单元的车载导航装置,具有感应单元与转向指示灯的头盔,握把套件,设置于握把套件上扭矩传感器与压力传感单元,包括以下步骤:
6.s1,头盔与车载导航装置通过蓝牙相连,并通过语音交互单元的指示路线行驶,测速单元进行测速;
7.s2,通过扭矩传感器对握把套件的转动力度进行测定,并与测速单元配对,通过语音交互单元对动力时速进行播报;
8.s3,车载导航装置通过语音交互单元发出转向提醒,并将转向信号通过4g无线发送模块发送至握把套件的动力控制端,动力控制端激活靠近待转向的一侧设置的握把套件上的振动单元,该握把套件发生振动;
9.s4,电动车车头转动时,通过握把套件的内端朝向电动车处设有的压力传感单元,识别电动车车头的转动方向,并将转动信息通过4g无线发送模块发送至头盔以及动力控制端,动力控制端启动电动车的方向指示灯指示后方车位。
10.作为本发明的进一步改进,所述扭矩传感器将力度数据通过4g无线发送模块发送至车载导航装置的4g无线接收模块,并通过语音交互单元对动力时速进行播报。
11.作为本发明的进一步改进,在所述s4中,收到转动信息的头盔将转动信息通过蓝牙传送至车载导航装置,经车载导航装置处理通过语音交互单元提醒驾驶者向后侧观察。
12.作为本发明的进一步改进,在所述s4中,压力传感单元通过与电动车的动力控制端电连接,作转动动作的车辆,动力控制端收到压力传感单元信号而减少动力输出。
13.作为本发明的进一步改进,在所述s2中,扭矩传感器通过与电动车的动力控制端电连接,握把套件的转动力度快速增大或快速减小,所述动力控制端将时速限制在低档模式,所述低档模式在时速每小时15千米氛围以内。
14.作为本发明的进一步改进,在所述s4中,所述压力传感单元测得的压力数值区间与动力控制端的时速档位相配对,从而对转向车速进行优化调控。
15.作为本发明的进一步改进,所述压力传感单元测得的压力数值区间呈跳跃式增大,所述动力控制端将时速限制在低档模式,所述低档模式在时速每小时15千米氛围以内。
16.作为本发明的进一步改进,所述感应单元,能够识别驾驶者脑袋转动方向,并直接启动头盔的转向指示灯工作。
17.与现有技术相比,本发明的有益效果是:
18.(1)一种驾驶电动车辅助系统及其辅助方法,能够提高行车安全,对驾驶者的行车作出智能化导向,弥补了驾驶者的操作缺陷。通过将车载导航装置与头盔相连,能够帮助驾驶者对行驶路线的提示,通过在头盔上设置感应单元与转向指示灯,通过感应单元对驾驶者脑袋转动方向的跟踪,并利用转向指示灯对后方车辆进行第一次提示。扭矩传感器对驾驶者转动握把进行监测,并通过与测速单元匹配,利用语音交互单元对驾驶者提示,能够最快的帮助驾驶者了解实时车速。根据车载导航装置的路线选定,第一次通过语音交互单元对驾驶者发出转向提醒,第二次,车载导航装置将转向信号发出至握把套件的相应接受模块,从而驱动转向的一侧握把套件振动,达到第二次触感提醒。在电动车车头转动时,利用设于握把套件内端的压力传感单元识别转动方向,并将转动信息通过4g无线发送模块发送至头盔以及动力控制端,动力控制端启动电动车的方向指示灯指示后方车位,实现对后方车辆的第二次提示。整个系统的行车安全措施相当完善,对电动车驾驶者在转向时提供了智能化的导向辅助,提高了行车安全。
19.(2)收到转动信息的头盔将转动信息通过蓝牙传送至车载导航装置,经车载导航装置处理通过语音交互单元提醒驾驶者向后侧观察,压力传感单元通过与电动车的动力控制端电连接,作转动动作的车辆,动力控制端收到压力传感单元信号而减少动力输出,多层次的提高行车转向安全。
附图说明
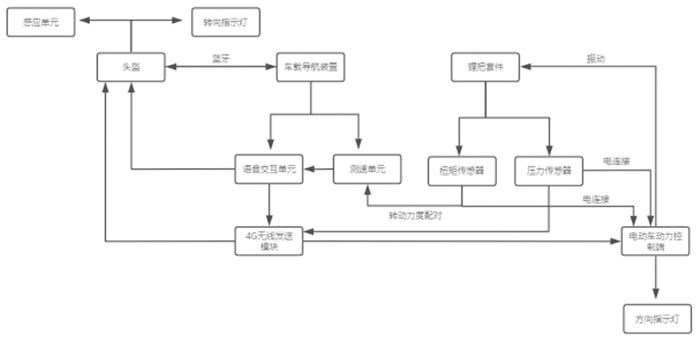
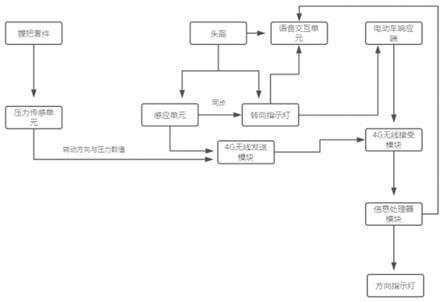
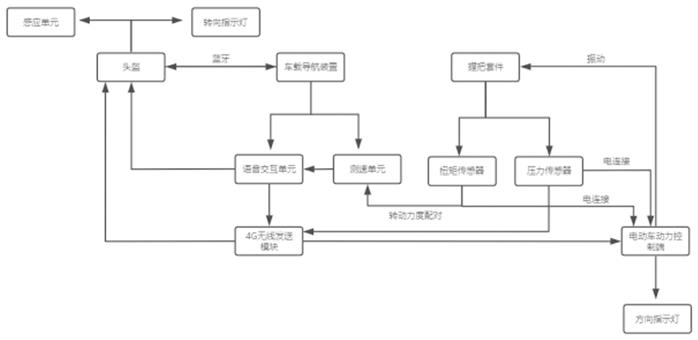
20.图1为本发明一种驾驶电动车辅助系统及其辅助方法的工作流程图。
具体实施方式
21.下面结合附图所示的各实施方式对本发明进行详细说明,但应当说明的是,这些实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
22.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
23.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
24.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本技术中的具体含义。
25.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
26.请参图1所示出的本发明的一种驾驶电动车辅助系统及其辅助方法的具体实施方式。
27.一种驾驶电动车辅助系统及其辅助方法,包括:具有测速单元以及语音交互单元的车载导航装置,具有感应单元与转向指示灯的头盔,握把套件,设置于握把套件上扭矩传感器与压力传感单元,所述感应单元,能够识别驾驶者脑袋转动方向,并直接启动头盔的转向指示灯工作,包括以下步骤:s1,头盔与车载导航装置通过蓝牙相连,并通过语音交互单元的指示路线行驶,测速单元进行测速。s2,通过扭矩传感器对握把套件的转动力度进行测定,并与测速单元配对,通过语音交互单元对动力时速进行播报,所述扭矩传感器将力度数据通过4g无线发送模块发送至车载导航装置的4g无线接收模块,并通过语音交互单元对动力时速进行播报。在所述s2中,扭矩传感器通过与电动车的动力控制端电连接,握把套件的转动力度快速增大或快速减小,所述动力控制端将时速限制在低档模式,所述低档模式在时速每小时15千米氛围以内。s3,车载导航装置通过语音交互单元发出转向提醒,并将转向信号通过4g无线发送模块发送至握把套件的动力控制端,动力控制端激活靠近待转向的一侧设置的握把套件上的振动单元,该握把套件发生振动。s4,电动车车头转动时,通过握把套件的内端朝向电动车处设有的压力传感单元,识别电动车车头的转动方向,并将转动信息通过4g无线发送模块发送至头盔以及动力控制端,启动方向指示灯与转向指示灯指示后
方车位。所述压力传感单元测得的压力数值区间呈跳跃式增大,所述动力控制端将时速限制在低档模式,所述低档模式在时速每小时15千米氛围以内。在所述s4中,收到转动信息的头盔将转动信息通过蓝牙传送至车载导航装置,经车载导航装置处理通过语音交互单元提醒驾驶者向后侧观察。在所述s4中,压力传感单元通过与电动车的动力控制端电连接,作转动动作的车辆,动力控制端收到压力传感单元信号而减少动力输出。在所述s4中,所述压力传感单元测得的压力数值区间与动力控制端的时速档位相配对,从而对转向车速进行优化调控。
28.具体的,一种驾驶电动车辅助系统及其辅助方法,能够提高行车安全,对驾驶者的行车作出智能化导向,弥补了驾驶者的操作缺陷。通过将车载导航装置与头盔相连,能够帮助驾驶者对行驶路线的提示,通过在头盔上设置感应单元与转向指示灯,通过感应单元对驾驶者脑袋转动方向的跟踪,并利用转向指示灯对后方车辆进行第一次提示。扭矩传感器对驾驶者转动握把进行监测,并通过与测速单元匹配,利用语音交互单元对驾驶者提示,能够最快的帮助驾驶者了解实时车速。根据车载导航装置的路线选定,第一次通过语音交互单元对驾驶者发出转向提醒,第二次,车载导航装置将转向信号发出至握把套件的相应接受模块,从而驱动转向的一侧握把套件振动,达到第二次触感提醒。在电动车车头转动时,利用设于握把套件内端的压力传感单元识别转动方向,并将转动信息通过4g无线发送模块发送至头盔以及动力控制端,启动方向指示灯与转向指示灯指示后方车位,实现对后方车辆的第二次提示。整个系统的行车安全措施相当完善,对电动车驾驶者在转向时提供了智能化的导向辅助,提高了行车安全。
29.收到转动信息的头盔将转动信息通过蓝牙传送至车载导航装置,经车载导航装置处理通过语音交互单元提醒驾驶者向后侧观察,压力传感单元通过与电动车的动力控制端电连接,作转动动作的车辆,动力控制端收到压力传感单元信号而减少动力输出,多层次的提高行车转向安全。
30.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。