1.本实用新型涉及自动化技术领域,特别涉及一种自动化机械设备用一体化机械手。
背景技术:
2.现有技术中,授权公布号cn206939936u的专利公开了一种废旧配件转移的自动化机械设备,包括底座,所述底座的上表面固定连接有支撑杆,所述支撑杆的上端固定连接有支撑板,所述支撑板的上表面一侧固定连接有第一电机,所述第一电机的端口位置轴连接有螺纹杆,所述支撑板的上表面另一侧固定连接有轴座,所述轴座的内侧活动套接螺纹杆的另一端,所述螺纹杆的表面活动套接有定位座,所述定位座的下端固定连接支撑板的上表面,所述螺纹杆的表面螺纹连接有螺纹套,所述螺纹套的下端固定连接有联动杆,该废旧配件转移的自动化机械设备,能够有效的将小型废旧零件进行统一回收,并进行通过升高和移动,使得废旧零件能够倒入回收池内,但其仍需要人工进行上料,费时费力,影响上料效率,如果回收桶内的废旧配件掉落在人身上将会造成人员损伤,安全性差。
技术实现要素:
3.本实用新型提供一种自动化机械设备用一体化机械手,所要解决的问题是授权公布号为cn206939936u的一种废旧配件转移的自动化机械设备,需要人工进行上料,费时费力,影响上料效率,安全性差。
4.为了解决上述技术问题,本实用新型采用以下技术方案:一种自动化机械设备用一体化机械手,包括第一机械臂,所述第一机械臂的一端固定连接有电机,所述电机的输出端通过第一转轴固定连接有蜗杆,所述蜗杆的两侧均啮合有蜗轮,所述蜗轮的上表面固定连接有驱动杆,所述驱动杆的一端通过第一连接轴活动连接有机械爪,所述机械爪的上表面通过第二连接轴活动连接有连接杆,所述连接杆的一端活动连接有固定杆,所述固定杆的下端固定连接有连接板。
5.优选的,所述第一机械臂的一端与连接板固定连接,所述连接板的上表面固定连接有支撑板,所述第一转轴与支撑板之间设置有轴承。
6.优选的,所述蜗轮的内表面通过第二转轴与连接板活动连接。
7.优选的,所述驱动杆的一端通过第一连接销和第二连接销与涡轮的上表面固定连接。
8.优选的,所述机械爪的一端固定连接有夹板,所述夹板的表面设置有防滑纹。
9.优选的,所述第一机械臂的一端活动连接有第二机械臂,所述第二机械臂的下端活动连接有安装座,所述安装座的下表面活动连接有转动座,所述转动座的下表面固定连接有固定座。
10.相对于现有技术,本实用新型通过电机、蜗杆、蜗轮、驱动杆、机械爪和连接杆的设置,在进行废旧配件上料时,转动座、第一机械臂和第二机械臂分别进行转动,使第一机械
臂转动至废旧配件的上方,电机工作通过第一转轴带动蜗杆转动,蜗杆通过蜗轮和驱动杆带动机械爪缩小一定角度,使夹板对废旧配件进行夹持,转动座、第一机械臂和第二机械臂相互配合将夹板移动至回收桶的上方,此时,电机反转,使机械爪张开一定角度,废旧配件即可自行落至回收桶中,有效解决了人工进行上料,费时费力,影响上料效率,安全性差的问题。
附图说明
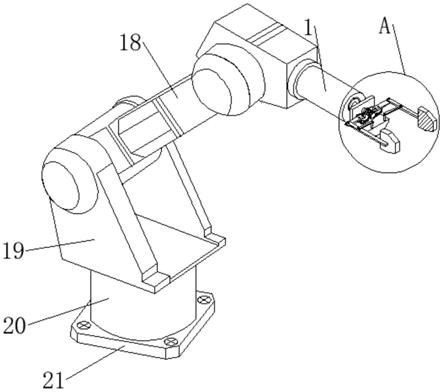
11.图1为本实用新型立体结构示意图;
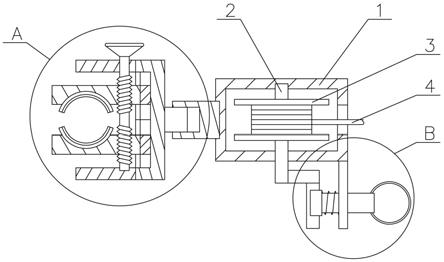
12.图2为本实用新型图1中a处结构放大示意图。
13.图中:1、第一机械臂;2、电机;3、第一转轴;4、蜗杆;5、蜗轮;6、驱动杆;7、机械爪;8、连接杆;9、固定杆;10、连接板;11、支撑板;12、轴承;13、第二转轴;14、第一连接销; 15、第二连接销;16、夹板;17、防滑纹;18、第二机械臂;19、安装座;20、转动座;21、固定座。
具体实施方式
14.如图1~2所示,一种自动化机械设备用一体化机械手,包括第一机械臂1,第一机械臂1的一端固定连接有电机2,电机2的输出端通过第一转轴3固定连接有蜗杆4,蜗杆4的两侧均啮合有蜗轮5,蜗轮5的上表面固定连接有驱动杆6,驱动杆6的一端通过第一连接轴活动连接有机械爪7,机械爪7的上表面通过第二连接轴活动连接有连接杆8,连接杆8的一端活动连接有固定杆9,固定杆9的下端固定连接有连接板10。
15.具体使用时,首先将该机械手安装在指定的位置上,然后将该机械手各个零部件之间与外部的控制装置进行连接,使得该机械手被外部的智能设备进行控制,并且通过外部的智能设备对该机械手进行运行过程的编程,使得该机械手进行运行,在进行废旧配件上料时,转动座20、第一机械臂1和第二机械臂18分别进行转动,使第一机械臂1转动至废旧配件的上方,电机2工作通过第一转轴3 带动蜗杆4转动,蜗杆4通过蜗轮5和驱动杆6带动机械爪7缩小一定角度,使夹板16对废旧配件进行夹持,转动座20、第一机械臂1 和第二机械臂18相互配合将夹板16移动至回收桶的上方,此时,电机2反转,使机械爪7张开一定角度,废旧配件即可自行落至回收桶中。
16.优选的,第一机械臂1的一端与连接板10固定连接,连接板10 的上表面固定连接有支撑板11,第一转轴3与支撑板11之间设置有轴承12,通过轴承12的设置,降低第一转轴3与支撑板11之间的摩擦力。
17.优选的,蜗轮5的内表面通过第二转轴13与连接板10活动连接。
18.优选的,驱动杆6的一端通过第一连接销14和第二连接销15 与蜗轮5的上表面固定连接。
19.优选的,机械爪7的一端固定连接有夹板16,夹板16的表面设置有防滑纹17,通过防滑纹17的设置,增大夹板16与废旧配件之间的摩擦力。
20.优选的,第一机械臂1的一端活动连接有第二机械臂18,第二机械臂18的下端活动连接有安装座19,安装座19的下表面活动连接有转动座20,转动座20的下表面固定连接有固定座21。
21.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用
新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种自动化机械设备用一体化机械手,其特征在于:包括第一机械臂(1),所述第一机械臂(1)的一端固定连接有电机(2),所述电机(2)的输出端通过第一转轴(3)固定连接有蜗杆(4),所述蜗杆(4)的两侧均啮合有蜗轮(5),所述蜗轮(5)的上表面固定连接有驱动杆(6),所述驱动杆(6)的一端通过第一连接轴活动连接有机械爪(7),所述机械爪(7)的上表面通过第二连接轴活动连接有连接杆(8),所述连接杆(8)的一端活动连接有固定杆(9),所述固定杆(9)的下端固定连接有连接板(10)。2.根据权利要求1所述的一种自动化机械设备用一体化机械手,其特征在于:所述第一机械臂(1)的一端与连接板(10)固定连接,所述连接板(10)的上表面固定连接有支撑板(11),所述第一转轴(3)与支撑板(11)之间设置有轴承(12)。3.根据权利要求1所述的一种自动化机械设备用一体化机械手,其特征在于:所述蜗轮(5)的内表面通过第二转轴(13)与连接板(10)活动连接。4.根据权利要求1所述的一种自动化机械设备用一体化机械手,其特征在于:所述驱动杆(6)的一端通过第一连接销(14)和第二连接销(15)与蜗轮(5)的上表面固定连接。5.根据权利要求1所述的一种自动化机械设备用一体化机械手,其特征在于:所述机械爪(7)的一端固定连接有夹板(16),所述夹板(16)的表面设置有防滑纹(17)。6.根据权利要求1所述的一种自动化机械设备用一体化机械手,其特征在于:所述第一机械臂(1)的一端活动连接有第二机械臂(18),所述第二机械臂(18)的下端活动连接有安装座(19),所述安装座(19)的下表面活动连接有转动座(20),所述转动座(20)的下表面固定连接有固定座(21)。
技术总结
本实用新型涉及一种自动化机械设备用一体化机械手,包括第一机械臂,所述第一机械臂的一端固定连接有电机,所述电机的输出端通过第一转轴固定连接有蜗杆,所述蜗杆的两侧均啮合有涡轮,所述涡轮的上表面固定连接有驱动杆;本实用新型通过电机、蜗杆、涡轮、驱动杆、机械爪和连接杆的设置,在进行废旧配件上料时,电机工作通过第一转轴带动蜗杆转动,蜗杆通过涡轮和驱动杆带动机械爪缩小一定角度,使夹板对废旧配件进行夹持,转动座、第一机械臂和第二机械臂相互配合将夹板移动至回收桶的上方,电机反转,使机械爪张开,废旧配件即可自行落至回收桶中,有效解决了人工进行上料,费时费力,影响上料效率,安全性差的问题。安全性差的问题。安全性差的问题。
技术研发人员:刘琼
受保护的技术使用者:襄阳职业技术学院
技术研发日:2021.06.08
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。