1.本发明涉及送餐机器人技术领域,具体涉及一种智能防疫送餐机器人。
背景技术:
2.经历过特殊时期,酒店业的发展受到重创,未来的发展又将何去何从。后疫情时代酒店业发展也将面临新的发展策略,包括提高卫生意识,强化清洁标准;改造户外空间,拓展创收能力;创造多功能空间,顺应趋势发展;倡导分餐制,顺应餐饮形式发展;强化康养意识,引导新型服务方式;开发科技功能,建设智慧酒店等。
3.不同的环境用于特殊的设计和生产,如餐厅配送机器人和送餐机器人,它们可以满足顾客的需求,如食品配送、自动充电、智能语音、自动导航、自主避障等。此外,在当今劳动力成本高的社会,使用智能机器人是合适的,具有广阔的市场和销售发展前景。没有必要休息或提供膳食,这比雇佣一名员工更节约成本。
4.在这样的背景下,我们推出了本发明的送餐机器人,为了解决酒店行业餐饮人流量大,人群密集,本产品可实现送餐上门的功能,利用agv导航技术寻找到顾客所在的酒店房间,住户通过人脸识别来打开储物门取餐,同时机器人会用红外测温将住户的体温信息通过物联网上传至控制室;本发明实现了酒店等环境下的智能化、自动化与信息化,解决了酒店餐饮就餐风险高,人工送餐工作量大,无法观察住户体温情况,在用户取餐时,各人的餐品没有很好的隔绝,可能会使得餐品被其他用户取餐时污染到的问题。
技术实现要素:
5.本发明要解决的技术问题是,针对现有技术存在的上述缺陷,提供了一种智能防疫送餐机器人,本发明结构新颖,构思巧妙,实现无接触自动化送餐,同时可进行人脸识别,并同时进行测温,将测温结果存储传送,温度超标时会发出警报,提醒专门的工作人员及时进行复测确认进而进行及时治疗,同时可进行杀菌处理,有利于使用。
6.本发明为解决上述技术问题所采用的技术方案是:一种智能防疫送餐机器人,包括agv小车、底座、机器人,机器人通过底座设置于agv小车上;机器人包括储物腔体、红外测温仪、人脸识别器、控制器,储物腔体上安设有储物门,打开储物门后即为储物腔,红外测温仪、人脸识别器和控制器均设置于储物腔体上,控制器分别与红外测温仪、人脸识别和agv小车连接。
7.按照上述技术方案,红外测温仪设置于储物门上,人脸识别器设置于红外测温仪一侧。
8.按照上述技术方案,储物腔体上还设有消毒系统,消毒系统包括储液箱和雾化喷头,储液箱通过输液管与雾化喷头连接,储液箱设置于储物腔体后端,雾化喷头设置于储物腔体顶部。
9.按照上述技术方案,储液箱内设有高液位机械开关、低液位机械开关。
10.按照上述技术方案,储物腔体内设置有储物箱,储物箱内安设有若干个储物机构,储物机构包括壳体、放置盒、第一伸缩移动机构和第二伸缩移动机构,壳体通过第二伸缩移动机构与储物箱连接,放置盒通过第一伸缩移动机构与壳体连接。
11.按照上述技术方案,第一伸缩移动机构包括第一丝杆和第一电机,第一丝杆的两端通过轴承与壳体两端连接,第一电机与第一丝杆的一端连接,第一丝杆上套设有第二移动块,第二移动块与放置盒连接;第二移动块通过螺纹与第一丝杆套接,第一电机驱动第一丝杆转动,第一丝杆通过第二移动块带动放置盒相对壳体沿第一丝杆长度方向来回移动伸出或回缩。
12.按照上述技术方案,第一丝杆的一侧设有导向柱,导向柱的两端与壳体连接固定,第二移动块套设于导向柱上,第一丝杆驱动第二移动块沿导向柱来回移动;导向柱与第一丝杆平行并排布置。
13.按照上述技术方案,第二伸缩移动机构包括第二丝杆和第二电机,第二丝杆的两端通过轴承与储物箱连接,第二电机与第二丝杆的一端连接,第二丝杆上套设有第一移动块,第一移动块与壳体连接;第二电机驱动第二丝杆转动,带动第一移动块沿第二丝杆的长度方向来回移动,使壳体相对于储物箱移入或伸出。
14.按照上述技术方案,储物门的中部设置有开关把手,开关把手的表面开设有防滑纹,,储物腔体的上端一侧设有通风口。
15.按照上述技术方案,沿机器人的移动路径上的停留点均布置有rfid标签,机器人储物腔体上设有rfid读取装置,rfid读取装置与控制器连接;所述rfid标签埋设于机器人移动路径中每一户的门前处,其内部存储对应路径点的停止编码数据,rfid标签采用st04
‑
1型。
16.按照上述技术方案,agv小车的底端安装有若干个行走轮。
17.按照上述技术方案,控制器连接有蜂鸣器,控制器通过无线传输模块与控制室,将对应人员的体温测量数据传输至控制室内。
18.本发明具有以下有益效果:本发明结构新颖,构思巧妙,实现无接触自动化送餐,同时可进行人脸识别,并同时进行测温,将测温结果存储传送,温度超标时会发出警报,提醒专门的工作人员及时进行复测确认进而进行及时治疗,同时可进行杀菌处理,有利于使用;有效的解决了现有的酒店行业餐饮人流量大,人群密集、酒店餐饮就餐风险高,人工送餐工作量大,无法观察住户体温情况,在用户取餐时,各人的餐品没有很好的隔绝,可能会使得餐品被其他用户取餐时污染到的问题。
附图说明
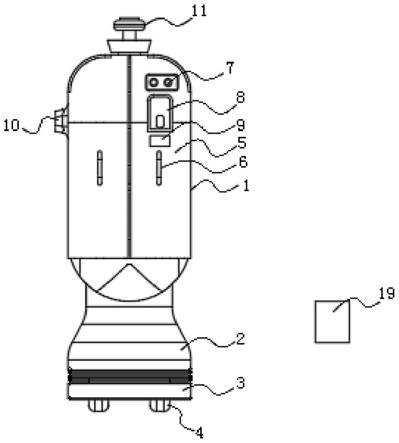
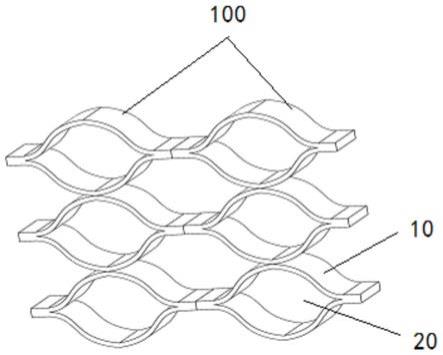
19.图1是本发明实施例中智能防疫送餐机器人的主视图;图2是图1的后视图;图3是本发明实施例中储液箱的内部结构示意图;图4是本发明实施例中储物腔内的结构示意图;图5是本发明实施例中储物机构的结构示意图;图6是图5的俯视图;
图7是本发明实施例中放置盒的结构示意图;图中,1
‑
机器人;2
‑
底座;3
‑
agv小车;4
‑
行走轮;5
‑
储物门;6
‑
开关把手;7
‑
红外测温仪;8
‑
人脸识别器;9
‑
无线传输模块;10
‑
通风口;11
‑
雾化喷头;12
‑
储液箱;13
‑
plc控制器;14
‑
蜂鸣器;15
‑
输液管;16
‑
储液腔;17
‑
高液位机械开关;18
‑
低液位机械开关;19
‑
rfid标签;20
‑
储物箱;21
‑
储物机构;22
‑
腔体;23
‑
第一丝杆;24
‑
导向柱;25
‑
第一伺服电机;26
‑
第一移动块;27
‑
第二丝杆;28
‑
第一丝孔;29
‑
第二伺服电机;30
‑
固定块;31
‑
第二移动块;32
‑
放置盒;33
‑
第二丝孔;34
‑
导向孔。
具体实施方式
20.下面结合附图和实施例对本发明进行详细说明。
21.参照图1~图7所示,本发明提供的一个实施例中的智能防疫送餐机器人,包括agv小车3、底座2、机器人1,机器人1通过底座2设置于agv小车3上;机器人1包括储物腔体、红外测温仪7、人脸识别器8、控制器13,储物腔体上安设有储物门5,打开储物门5后即为储物腔,红外测温仪7、人脸识别器8和控制器均设置于储物腔体上,控制器分别与红外测温仪、人脸识别和agv小车(3)连接。
22.进一步地,红外测温仪7设置于储物门5上,人脸识别器8设置于红外测温仪7一侧。
23.进一步地,储物腔体上还设有消毒系统,消毒系统包括储液箱12和雾化喷头11,储液箱12通过输液管15与雾化喷头11连接,储液箱12设置于储物腔体后端,雾化喷头11设置于储物腔体顶部。
24.进一步地,储液箱内设有高液位机械开关、低液位机械开关;储液箱12的一侧安装有plc控制器13,plc控制器13的一侧安装有蜂鸣器14,储液箱12的内部设置有储液腔16,储液腔16的顶部安装有高液位机械开关17,储液腔16的底部安装有低液位机械开关18,高液位机械开关17和低液位机械开关18均电性连接plc控制器13,plc控制器13电性连接蜂鸣器14,使用时,当储液腔16内的液位处于低液位机械开关18位置处时,低液位机械开关18将信号传递给plc控制器13,plc控制器13控制蜂鸣器14发出蜂鸣声,提醒储液腔16内部液位不足,需要及时补充消毒液,若液位加至高液位机械开关17时,高液位机械开关17将信号传递给plc控制器13,plc控制器13分析后控制蜂鸣器14发出与低液位不同的蜂鸣声,提醒加液人员停止加液,便于进行液位监测。
25.进一步地,储物腔内设置有储物箱20,储物箱20内安设有若干个储物机构21,储物机构21包括壳体22、放置盒32、第一伸缩移动机构和第二伸缩移动机构,壳体22通过第二伸缩移动机构与储物箱20连接,放置盒32通过第一伸缩移动机构与壳体22连接。
26.进一步地,第一伸缩移动机构包括第一丝杆23和第一伺服电机25,第一丝杆23的两端通过轴承与壳体22两端连接,第一伺服电机25与第一丝杆23的一端连接,第一丝杆23上套设有第二移动块31,第二移动块31与放置盒32连接;第二移动块31通过螺纹与第一丝杆23套接,第一伺服电机25驱动第一丝杆23转动,第一丝杆23通过第二移动块31带动放置盒32相对壳体22沿第一丝杆23长度方向来回移动。
27.进一步地,第一丝杆23的一侧设有导向柱24,导向柱24的两端与壳体22连接固定,第二移动块31套设于导向柱24上,第一丝杆23驱动第二移动块31沿导向柱24来回移动;导向柱24与第一丝杆23平行并排布置。
28.进一步地,第二伸缩移动机构包括第二丝杆27和第二伺服电机29,第二丝杆27的两端通过轴承与储物箱31连接,第二伺服电机29与第二丝杆27的一端连接,第二丝杆27上套设有第一移动块26,第一移动块26与壳体22连接;第二伺服电机29驱动第二丝杆27转动,带动第一移动块26沿第二丝杆27的长度方向来回移动,使壳体22相对于储物箱31移入或伸出。
29.进一步地,机器人1位于储物门5的内侧设置有储物箱20,储物箱20的内部安装有若干个储物机构21,储物机构21包括壳体22、第一丝杆23、导向柱24、第一伺服电机25、第一移动块26、第二丝杆27、第一丝孔28、第二伺服电机29、固定块30、第二移动块31、放置盒32、第二丝孔33和导向孔34,壳体22嵌入设置在储物箱20内,壳体22的中部安装有第一丝杆23,第一丝杆23的两侧均设置有导向柱24,第一丝杆23的一端安装有第一伺服电机25,壳体22的两侧对称设置有四个第一移动块26,第一移动块26的中部插接有第二丝杆27,第一移动块26对应第二丝杆27位置处开设有第一丝孔28,第二丝杆27的一端安装有第二伺服电机29,第二丝杆27的一端通过轴承安装有固定块30,固定块30固定在储物箱20上,第一丝杆23和导向柱24上套接有第二移动块31,第二移动块31的顶端设置有放置盒32,第二移动块31对应第一丝杆23位置处开设有第二丝孔33,第二移动块31对应导向柱24位置处开设有导向孔34。
30.进一步地,储物门5的中部设置有开关把手6,开关把手6的表面开设有防滑纹,,储物腔体的上端一侧设有通风口10。
31.进一步地,沿机器人的移动路径上的停留点均布置有rfid标签,机器人储物腔体上设有rfid读取装置,rfid读取装置与控制器连接;所述rfid标签19埋设于机器人1移动路径中每一户的门前处,其内部存储对应路径点的停止编码数据,当移动平台读取到停止数据后,暂停一端时间,等待住户操作,用户开始操作则按操作顺序进行,操作完成后,按轨迹继续运行;若一端时间之后没有用户进行人为的操作,则机器人继续沿着轨迹运行。
32.rfid标签19采用st04
‑
1型,rfid标签19工作频率为125khz,通信接口为rs232,通信波特率为9600bps,读卡距离超过10cm,支持emid和fdx
‑
b两种格式的电子标签。
33.进一步地,agv小车3的底端安装有若干个行走轮4。
34.进一步地,控制器连接有蜂鸣器,控制器通过无线传输模块9与控制室,将对应人员的体温测量数据传输至控制室内。
35.本实施例中红外测温仪7采用mlx90614型,人脸识别器8采用esp32
‑
cam型。
36.进一步地,机器人1储藏室的底部设置有一个限位开关,正常状态下开关被餐盒压住处于闭合状态,住户取完餐后餐盒被拿走,开关断开,控制芯片接收到信号后控制机器人1沿着轨迹继续行进,机器人1的控制芯片采用ipa15w4k58s4单片机;本发明的工作原理:本发明使用时,机器人1通过底部设置的agv小车3行至住户位置处时,即相应的rfid标签19标签位置处,当住户在人脸识别器8位置处进行完面部识别操作之后,机器人1上的红外测温仪7开始工作,对住户进行体温测量,完成完体温测量之后并通过无线传输模块9传输至控制室,此时,机器人1将根据红外测温仪7所检测的住户体温数据判断住户是否体温正常,成年人正常体温普遍36.3℃~37.2℃这个范围,以此为依据,若所测得该住户的体温介于该正常范围之间,则显示体温正常,打开机器人1存餐的储物门5,同时控制对应位置的第一伺服电机25工作,第一伺服电机25工作带动第一丝杆23转动,第
一丝杆23转动与第二移动块31上开设的第二丝孔33的配合下,使得第二移动块31在第一丝杆23上向外侧移动一端距离后停止,即第二移动块31的右端处于第一丝杆23的最右端停止,此时,第二伺服电机29工作,第二伺服电机29工作带动第二丝杆2转动,第二丝杆2转动与第一移动块26上开设的第一丝孔28的配合下,使得第一移动块26在第二丝杆2上向右侧移动,直至第一移动块26移动至固定块30位置处,第一移动块26的移动距离等于第二移动块31的长度,此时放置盒32完全处于外部,使用者即可将放置盒32内部的餐品取出,其余餐品不会推出,保证其余餐品的密封性,避免疫情时的污染,进行后续操作,如若该住户体温不正常,则机器人1将报警,此时存餐储物门5不打开,并通过无线传输模块9通知现场的工作人员,将由指定工作人员对该住户进行二次人工体温,并送往医院进行进一步检查;在进行体温检测的过程中无论住户是否显示体温正常,其体温检测结果都将上传至云平台,便于后期对当天疫情数据分析统计,并反馈至微信公众号供工作人员掌握目前疫情状况,安装的雾化喷头11可在机器人1行进过程中对酒店走廊进行杀菌消毒,在机器人1停止移动时,雾化喷头11会停止工作,防止误喷到人体。
37.本发明结构新颖,构思巧妙,无需人工接触时送餐,同时可进行人脸识别,并同时进行测温,放餐与取餐时,各人的餐品不会相互干扰,保证卫生,将测温结果输送至控制室,温度超标时会发出警报给专门的工作人员,提醒专门的工作人员及时进行复测确认进而进行及时治疗,同时可进行杀菌处理,有利于使用。
38.以上的仅为本发明的较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等效变化,仍属本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。