1.本发明涉及一种根据权利要求1的条款的、用于在移动和/或静止的传送带装置或传送带机械处自动化转运松散材料的方法,该传送带装置或传送带机械用于地表采矿。本发明还涉及一种计算机程序、用于存储计算机程序的机器可读数据介质和可以执行根据本发明的方法的设备。
背景技术:
2.在表采矿中使用的连续运行的传送带系统的范围内的材料流以本身已知的方式在移动和/或静态材料承载传送装置之间的过渡处转运。在这种情况下,材料流的自由转运在所谓的转运点通过适当的传送转运斜槽执行,或者没有材料引导地自由转运。通过传送装置,由挖掘或采矿挖掘机(例如斗轮挖掘机)在挖掘现场的挖掘前部挖掘的材料或松散材料通常被转运到移动带桥或带式货车等,并且最终转运到具有布置在采场带上的行进轨道或料斗车(轨道承载的或基于底盘的)的轨道承载或基于底盘的运输系统,或例如自动或非自动翻斗车的运输车辆,来执行进一步运输。
3.为了使材料流在相应的转运点处的最大可靠转运的自动化,有必要根据各自涉及的传送装置的可用运动自由度使传送装置相对于彼此精确地定向。由此产生的必要对准任务在现有技术中通常由辅助人员执行,以便确保即使在相应存在的装置组件的多个传送装置的平移运动过程期间,材料流也连续且无损失地转运到整个传送系统的相应跟随的传送装置。
技术实现要素:
4.本发明基于这样的思想,以便允许在这里讨论的类型的传送带系统中的最大连续的材料流,该传送带系统设置在挖掘现场、特别是在至少两个传送装置之间的上述转运点处,通过与在转运点处涉及的传送装置的局部位置和/或优选地由此涉及的传送装置的水平(角度)定向相关的自由度的开环控制或闭环控制,来执行对布置在所谓转运点处的传送装置的自动调节。
5.根据根据本发明的方法和装置,尽可能地实时处理所涉及的传送装置的位置和/或角度数据(由传感器确定和/或基于模型导出),以便在相应的转运点处对所讨论类型的传送装置执行所需的精确定向。
6.根据所提出的方法的一个方面,该方法可以在程序上细分为以下三个技术部分:
7.1.根据第一过程部分,执行通过传感器实时记录涉及至少一个转运点的挖掘/传送装置的局部位置和/或角度定向。这些装置优选地涉及局部存在于这里所讨论类型的挖掘或传送系统的挖掘前部或采矿边缘处的装置组件。在这种情况下,通过传感器的记录可以通过雷达、通过至少一个参考物体(例如反射器环)、通过激光雷达(=光检测和测距)、通过本身已知的根据渡越时间原理等的应答器技术、或者通过本身已知的照相机技术来执
行。
8.作为替代或附加,可通过基于卫星的gnss对所涉及的传送装置的材料排放和材料接收区域的定位来执行记录,所述材料排放和材料接收区域存在于相应的转运点处。出于精度的原因,在这种情况下优选地使用d
‑
gps(差分gps)定位系统。
9.作为替代或附加,也可以基于模型,例如借助于装置固有位置和/或运行数据,例如通过适当的角度编码器或通过布置在传送装置外部的光学图像识别,来执行相应转运点的确定。
10.2.根据根据本发明的方法的第二过程部分,确定用于存在的传送系统的运行的适当过程变量,通过该过程变量,可以相对于相应的转运点尽可能精确地调节所涉及的传送装置的位置和/或水平定向。在这种情况下,可以预先计算分别跟随的工作步骤的上级挖掘过程规划,或者挖掘机的相应路径规划,或者至少局部存在的传送装置的相应路径规划,可选地跨越装置组件。
11.优选地存在于过程规划中的用于整个挖掘过程的模型在这种情况下还可以包括存在的采矿机(例如斗轮挖掘机)的挖掘前部处的环境检测以及涉及采矿机附近的传送装置的环境检测,具体地包括挖掘前部区域中的任何现有路堤几何形状和/或可能的障碍物。
12.3.根据本发明的方法的第三过程部分,借助于适当的驱动指令和/或所涉及的挖掘/传送装置的倾斜/提升运动,尤其是通过上级控制逻辑或相应的控制算法,来执行对存在的传送系统的整个装置组件的控制。
13.控制逻辑或控制算法优选以模块化的方式配置,使得通过相应的参数化可以扩展和简化装置组件中所涉及的挖掘和/或传送装置。因此,可以减少传送装置的数量和/或每个传送装置相应的自由度。此外,单独的装置可以根据情况以简化的方式“对接”到另外的装置。
14.根据所提出的方法的另一方面,上述逻辑或算法可以是基于控制的,整个装置组件的控制行为映射到控制结构中,并且因此不是针对传送系统的所有运行情况而被严格地指定。相应的控制算法还可以配置为通用的或自学习的,例如通过人工神经网络(ann)。因此,可以通过对在相应的转运点的区域中的至少两个挖掘和/或传送装置的运动的相关自由度的开环控制和/或闭环控制来执行对在相应的转运点处涉及的至少两个挖掘和/或传送装置的自动调节。在这种情况下,使用在相应的转运点处涉及的挖掘和/或传送装置的位置,和/或在相应的转运点处涉及的挖掘和/或传送装置的水平和/或竖直定向作为相关自由度。
15.根据另一方面,可以设置为,所提出的方法还用于控制传送系统,适当的传感器系统或基于模型的仿真用于确定在材料工作负荷变化的情况下是否应当修改或调节传送过程的速度。特别地,可以考虑在各个转运点处可靠地执行材料转运和/或考虑任何随后的分类和/或尺寸减小过程来执行这种调节。这是因为相对粗的开采材料减慢了尺寸减小过程,而相对细的工作负荷材料可能由于破碎系统的单元的速度不足而用材料压倒任何随后的破碎系统。
16.这种情况下,应当指出的是,借助于根据本发明的方法,特别是在执行上述过程模拟时,即使是通过传感器系统至少部分地自动化的现有传送系统,也仍然可以追溯地显著改进。
17.根据另一方面,可以设置为,借助于由传感器确定的、在相应的转运点处涉及的至少两个挖掘和/或传送装置的空间位置和/或定向、在这种情况下通过模型计算来计算在相应的转运点处涉及的挖掘和/或传送装置的适当位置和/或角度数据,借助于在相应的转运点处涉及的挖掘和/或传送装置的适当位置和/或角度数据执行对在相应的转运点的区域中的挖掘和/或传送装置的精确定向。
18.根据另一个方面,可以设置为,基于控制执行对在相应的转运点的区域中对至少两个挖掘和/或传送装置的空间位置和/或定向的调节,将在相应的转运点处涉及的至少两个挖掘和/或传送装置的闭环控制或开环控制行为映射到控制结构中。在这种情况下,还可以设置为,通过自学习算法来执行在相应转运点的区域中的至少两个挖掘和/或传送装置的空间位置和/或定向的基于控制的调整。
19.根据另一方面,可以设置为,根据传送过程的变化速度来执行对在相应的转运点处涉及的至少两个挖掘和/或传送装置的致动。
20.根据另一方面,为了通过具有挖掘机、至少一个带式货车和料斗车的传送带系统来执行,可以设置为,在对相应的转运点处涉及的至少两个挖掘和/或传送装置的致动中,使用与挖掘机的卸料吊杆相关并且与料斗车的位置相关的带式货车的前进速率和转动角度作为控制变量。在这种情况下,可以设置为,以总体上最佳地利用传送带系统的方式进一步指定挖掘机在挖掘现场的方向上的前进速率。
21.最后,根据又一方面,可以设置为,通过传感器记录传送带系统的第一传送系统中的第一材料流和传送带系统的第二传送系统中的第二材料流,并且在第一材料流和第二材料流存在差异的情况下,对挖掘机的前进速率执行适当的调节,通过调节补偿现有的偏差。
22.根据本发明同样提出的设备配置为在通过所提出的方法挖掘或采矿期间以基本自动化的方式控制这里讨论的类型的传送系统,特别是分别涉及的传送装置的空间移动和/或空间定向。
23.根据一个方面,所提出的设备可以具有用于确定在相应的转运点处涉及的挖掘和/或传送装置的空间位置和/或定向的传感器系统、用于借助于所确定的空间位置和/或定向并且基于挖掘过程的数据模型在传送带系统上执行挖掘过程的规划的计算模块,以及开环控制器和/或闭环控制器,用于借助于计划的挖掘过程致动和/或受控致动相应的转运点处所涉及的挖掘和/或传送装置。
24.本发明特别是可以用在挖掘和/或传送系统中,该挖掘和/或传送系统主要可用于在地上(在地表上)执行矿石或褐煤的地表(之上)采矿,但原则上也可用于在地下执行低下采矿来开采矿石、无烟煤、砂或岩石。也相应地在挖掘和/或传送系统中使用,用于开采用于水泥生产的松散原材料,或者在其他工业系统中使用,其中松散材料或物质需要通过这里讨论的类型的传送带技术在相对长的距离上传送。
25.根据本发明的计算机程序被配置为执行该方法的每个步骤,特别是当所述计算机程序在计算机装置或控制装置上运行时。允许在电子控制装置上实施根据本发明的方法,而不必对电子控制装置执行结构修改。为此目的,提供机器可读数据介质,在该机器可读数据介质上存储根据本发明的计算机程序。通过在设备或相应的电子控制装置上执行根据本发明的计算机程序,获得根据本发明的设备,该设备配置为通过根据本发明的方法运行这里所讨论类型的传送带系统,或者控制相应的传送带运行。
26.本发明的其他优点和配置可以在说明书和附图中找到。在附图中,相同或功能等同的元件或特征具有相同的附图标记。
27.应当理解,在不脱离本发明的范围的情况下,上述特征和下面将要解释的特征不仅可以在分别指定的组合中使用,而且可以在其他组合中或单独使用。
附图说明
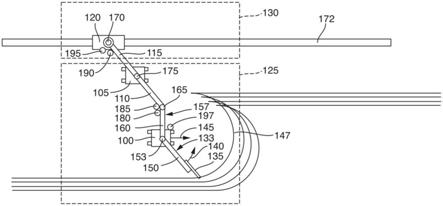
28.图1示出包括根据本发明的传感器系统的采矿或斗轮挖掘机以及位于矿床的挖掘或采矿边缘处的相应传送装置的典型空间布置的示意性平面图。
29.图2借助于组合的流程图/框图示出根据本发明的方法或设备的示例性实施例。
30.图3示出根据本发明的用于本文所讨论类型的传送系统的自动运行的基于传感器的模拟计算的示例性实施例。
具体实施方式
31.下面将参照用于通过斗轮挖掘机开采矿石的地上传送系统的示例性实施例来描述根据本发明的用于运行这里所讨论类型的传送系统的方法和相应的控制设备。然而,该方法和设备也可以相应地用在以另一种方式使用的地上或地下挖掘/传送系统中,例如用于矿石、煤、砂或岩石的开采。
32.这里所讨论类型的传送系统通常包括与挖掘机配合的多个材料传送装置。在挖掘过程或采矿过程期间,传送装置相对于彼此和相对于挖掘机的空间布置或定向可以是计算机建模的。在这种情况下,对建模最有影响的过程部分是布置在挖掘机与料斗车之间的传送桥或带式货车的精确定位和空间定向。
33.图1示出了示例性装置布置或装置组件,包括布置在挖掘前部117处的挖掘机100(在当前情况下为用于地表采矿的斗轮挖掘机)、具有接收吊杆110和卸料吊杆115的带式货车105以及在本示例性实施例中布置在行进轨道上的料斗车120。
34.在这种情况下应当指出的是,在本示例性实施例中由斗轮挖掘机100和带式运货车105组成的装置组件代表根据虚线125的第一传送系统,并且能够在行进轨道上移动的料斗车120代表根据虚线130的相应的第二传送系统。因此,第一传送系统125基本用于松散材料的近挖掘运输离开,并且具有料斗车120的第二传送系统130基本用于将已经挖掘的松散材料进一步传送至相对较远的装载地点,例如用于将松散材料装载到运输车辆上,例如卡车或另外的轨道车辆,例如货运列车。
35.还应当指出的是,根据替代的装置布置或根据替代的使用场景,斗轮挖掘机100还可以将松散材料直接递送到料斗车120,在该场景中,在所述斗轮挖掘机100和所述料斗车120之间没有布置带式货车105。
36.斗轮挖掘机100以本身已知的方式具有斗轮135,斗轮135可转动地安装在水平地平面(=附图的平面)中,并且通常也垂直于水平地平面安装在第一传送吊杆133上。通过第一传送吊杆133和因此斗轮135对应于第一箭头方向140的水平横向运动以及斗轮135或对应地挖掘机100在所谓的“采矿边缘”147处沿第二箭头方向145的向前运动,挖掘或开采松散材料。
37.由斗轮挖掘机100挖掘的松散材料通过布置在第一传送吊杆133上的第一传送带
150在设置在斗轮挖掘机100上的固定转运或连接部位155处馈送到布置在第二传送吊杆157上的材料移除第二传送带160。
38.在第一转运点(tp1)165处,发生由斗轮挖掘机100递送的松散材料到带式货车105的转运。在斗轮挖掘机100的挖掘或开采运行期间,即,特别是在挖掘机沿第二箭头方向145向前运动同时斗轮转动运动期间,斗轮挖掘机100的转运点(tp1)165处的非固定转运必须逐渐地尽可能多地与带式货车105的接收吊杆110空间对应,使得在转运期间,没有松散材料从第二传送带160和/或接收吊杆110落下而且因此在挖掘过程中丢失。
39.在本示例性实施例中,带式火车105的卸料吊杆115到料斗车120的转运点表示第二同样非固定的转运点(tp2)170,因为料斗车120也需要在斗轮挖掘机100的前进方向145上相应地重新调节。
40.在这种情况下,应当强调的是,在本示例性实施例中,带式货车105的接收吊杆110和卸料吊杆115可转动地安装在拖车175上并且以固定的方式彼此连接,并且因此不能彼此独立地水平移动。
41.然而,应当指出,本发明原则上还包括带式货车105的接收吊杆110和卸料吊杆115相对于彼此可转动地(可旋转地)安装在拖车175上的使用场景。在这种情况下,还应当强调的是,本发明包括布置这里所讨论的类型的传送装置的所有可能的方式,需要致动器和/或传感器分别对所讨论的装置的基本移动自由度执行至少一次访问。
42.因此,在本示例性实施例中,在两个转运点(tp1)165和(tp2)170处分别自由传送松散材料需要在斗轮挖掘机100沿第二箭头方向145向前移动期间对相应的两个转运点165、170执行恒定调节或重新对准,具体地,一方面在斗轮挖掘机100与带式运货车105之间,另一方面在带式运货车与料斗车120之间。在本示例性实施例中,料斗车120表示相应的铁路网172的轨道运输车辆。
43.在这种情况下应当指出的是,也可以设置配置为带式传送或运输车辆(例如自动或非自动运行的自卸卡车)的采场带,而不是特别地用于从挖掘前部117或从前述第二传送系统130进一步运输挖掘的松散材料的铁路网172。
44.此外,为了最佳运行,整个传送系统还需要对第一传送系统125和第二传送系统130的最佳利用。除了在相应的转运点165、170处必须尽可能不存在采矿损失的要求之外,整个传送系统中的载荷分布因此也应当尽可能均匀地执行。同时,不应超过各传送装置各自允许的最大采矿量或相应的采矿重量。
45.在这方面应当指出的是,材料流的这种载荷分布优选地仅在前述挖掘机100(或移动破碎机等)之后执行,具体地,在这里所讨论的类型的传送系统的区域中,通过前述传送装置和在相应的转运点传送挖掘的或开采的松散材料的现有材料流。
46.借助于根据本发明的方法和设备,可以满足图1所示的传送系统的运行的上述要求,所述方法和设备允许通过适当的传感器系统和上述模型计算来自动化各个转运点的调节。此外,还可以通过学习方法,例如借助于人工神经网络(ann),额外地改进分别存在的传送装置的位置和/或定向的相应所需的动态调整的精度。
47.在本示例性实施例中,上述传感器系统包括分别协作的应答器对180、185和190、195,应答器对180、185布置在相应的转运点(tp1、tp2)165、170处。在这种情况下,第一应答器180布置在斗轮挖掘机100的第二传送吊杆157上,并且第二应答器185布置在带式货车
105的接收吊杆110上。第三应答器190布置在带式货车105的卸料吊杆115上,第四应答器195布置在料斗车120上。应答器对180
‑
195可以分别由两个有源应答器(即配备有自己的能量供应的两个应答器)形成,或者由一个有源应答器和一个无源应答器的相应组合形成。借助于应答器,可以自动地确定在转运点165或170处涉及的传送装置100、105、120的两个端部区域是否彼此足够接近或彼此之上,从而在转运期间没有松散材料从传送系统损失。
48.还应当指出,优选地,绝对测量位置传感器和相对测量传感器两者都是对这里所讨论类型的装置组件的现有运行状况执行上述建模的先决条件。在这种情况下,这两种传感器类型可以基于非常不同或不同的物理测量原理。
49.图2借助于组合的框图/流程图示出了根据本发明的方法或设备的示例性实施例。所示的方法在本示例性实施例中基于已知的传感器系统,在本示例中基于应答器技术,用于记录在相应的转运点(tp1、tp2)165、170处涉及的传送装置100、105、120的相关位置数据。
50.作为替代或附加,可以基于雷达或基于光来产生所需的传感器系统,例如通过“激光雷达”系统,该系统然后同样布置在分别涉及的传送装置的转运点165、170(参见图1)的区域中。作为替代或附加,在转运点165、170处涉及的挖掘/传送装置100、105、120的位置和/或定向也可以借助于基于卫星的gnss数据来确定。在这种情况下,基于使用的位置,可以采用那里可用的最佳卫星定位系统。作为替代或附加,也可以采用光学传感器系统,例如借助于ir传感器、激光传感器或基于本身已知的相机技术的传感器系统。
51.在挖掘机100处,可以另外设置同样优选地通过传感器运行的环境检测197,用于对采矿边缘147、特别是可能的障碍物、例如树立在道路上的植被或一组树木(堤坝)执行空间监测,为了根据本发明运行这里所讨论的类型的挖掘/传送系统,还能够预先对整个挖掘和开采过程执行精确和可靠的规划。
52.在本示例性实施例中,图2所示的方法另外基于图1所示的(本地)传送装置组件的计算机辅助模型模拟。模型模拟一方面包括对分别存在的传送装置组件的可能的运动过程(运动学)的基于模型的计算,即,特别是在其中涉及的挖掘/传送装置100、105、120的可能的运动过程期间发生的这些装置或机器的位置和/或定向。
53.此外,示例性实施例中的模型计算包括挖掘过程本身的计算模型200,即,对于图1所示的挖掘机100的铲斗轮135的假定横向挖掘运动发生的相应碎片或松散材料的材料量和/或尺寸分布。此外,借助于模型计算,由两个传送系统125、130组成的局部挖掘/传送装置组件以这样的方式运行,即,尽可能优化地利用两个传送系统125、130。在这种情况下,可以寻求所涉及的挖掘/传送装置100、105、120的采矿或松散材料的最大均匀载荷分布、最大开采量以及在转运点165、170处的最小可能或甚至没有采矿或材料损失。
54.通过计算模块210、借助于传感器系统180
‑
195递送的与所描述的转运点相关的位置数据205来执行对挖掘过程的规划,特别是整个本地传送链或本地涉及的挖掘/传送装置100、105、120的相应所需的调节。在这种情况下,考虑挖掘/传送装置100、105、120的运动的可能的自由度。挖掘过程的规划特别是基于这样的知识,即这里所讨论的类型的装置组件的各个装置的空间定向可以总是在引导装置上(自动地)定向。如已经提到的,挖掘过程的模型可以另外基于前述环境检测197的传感器数据。
55.在局部挖掘/传送装置组件的运动的预测规划期间,计算在挖掘机100或斗轮135
的运行中以及在带式货车105和料斗车120的运动中可能的时间流逝或与时间相关的运动曲线。
56.借助于上述进一步的约束,例如最大均匀的载荷分布和避免超过最大允许采矿量,整个装置组件通过控制器(例如本身已知的可编程逻辑控制器(plc))来致动215。可以以本身已知的方式通过对斗轮挖掘机100的相应驱动指令、斗轮135的相应倾斜运动和对带式货车105的移动传送桥110、115的相应驱动指令来执行该致动。驱动指令可以例如涉及关于所涉及的挖掘/传送装置的位置和/或对准的向前运动值的调节。这些调节确保尽可能没有开采的材料在这里所讨论的类型的转运点(tp1、tp2)165、170处从传送带落下并且因此在进一步的传送过程中损失。
57.代替所描述的预测规划,所描述的方法还可以配置为能够学习的基于ann的系统或自动控制系统或自学习调节器。在这样的控制系统中,可以将挖掘/传送装置组件的整个挖掘过程的所需挖掘量或挖掘机100的与所需挖掘量相关的向前运动值指定为设定点变量。因此,可以通过闭环控制以如下方式来调节作为实际变量的挖掘机100的向前运动的当前值适当即执行当前所涉及的挖掘/传送装置100、105、120的在转运点(tp1、tp2)165、170处无损失地转运所开采的材料所需要的运动。
58.在图3中,借助于示例性实施例更详细地表示图2中提到的计算。在这种情况下,再次假设图1所示的传送系统包括斗轮挖掘机100、带式货车105和料斗车120。然而,应当指出,在具有两个或更多带式货车的示例性实施例中,将相应地需要考虑另外的转运点,例如在两个带式货车的情况下具有附加转运点(这里未示出)的三个转运点。
59.由于图1所示的接收吊杆110相对于带式货车105的卸料吊杆115的固定布置,因此当前的优化或对准问题包括合适的转运点(tp1)165和合适的转运点(tp2)117的两个位置变量。该优化用于确保挖掘/传送装置100、105、120的端部区域在挖掘过程中的任何时间在转运点(tp1、tp2)165、170处尽可能地布置在彼此上方。
60.在该对准或优化问题中,在本示例性实施例中,使用带式货车105相对于斗轮挖掘机100的卸料吊杆157的前进速率和转动角度或定向以及料斗车120沿着轨道172的位置作为用于调节的影响量。斗轮挖掘机100在图1所示的第二箭头方向145上、在采矿边缘147的方向上的前进速率在这种情况下以这样的方式指定,即以最大可能的材料(数量)吞吐量最佳地利用两个传送系统125、130。
61.使用可以通过传感器系统180、185、190、195来测量或确定的以下量作为用于优化的可能的可变运行量:
62.‑
斗轮挖掘机100的卸料吊杆157的转动角度和高度位置,
63.‑
带式货车105的位置,
64.‑
带式货车105的传送桥110、115的转动角度和高度位置以及布置在那里的所有可单独移动的吊杆,以及
65.‑
料斗车120沿着轨道172的位置。
66.根据通过传感器系统180
‑
195记录的位置数据,也可以以本身已知的方式计算上述角度数据。因此,根据通过两个传感器185、190记录的位置数据,不仅可以看出带式货车105的接收吊杆110和卸料吊杆115的两个端部区域的水平位置,还可以看出由接收吊杆110和卸料吊杆115形成的传送桥的水平角度,例如,相对于斗轮挖掘机100的前进方向145,可
以以本身已知的方式三角测量地确定。
67.在图3所示的程序中,第一传送系统125中的当前第一材料流300和第二传送系统130中的当前第二材料流305通过本身已知的传感器系统(这里未示出)初始地记录或确定。将这两个值300、305馈送到第一计算模块310,在第一计算模块310中,根据这两个值300、305的可能偏差来计算铲斗轮挖掘机100的前进速率的适当调节,通过该适当调节可以消除或补偿可能的偏差。
68.通过在计算310期间获得的向前运动数据,以相应的指定的前进速率致动315斗轮挖掘机100。
69.基于由此获得的斗轮挖掘机100的前进速率,特别是基于当前由传感器系统180
‑
195记录的前述位置数据325,通过第二计算模块320来执行对整个挖掘/输送链100、105、120(包括吊杆157、110、115)的模型计算或仿真,以便确定斗轮挖掘机100的卸料吊杆157、带式货车105和料斗车120在运行中的适当的控制干预或措施。通过这些措施实现的目的是,由于上述原因,所涉及的挖掘/传送装置尽可能精确地定向在上述转运点165、170处。因此,这些措施或调节可以几乎实时地执行,特别是在斗轮挖掘机100的前进速率可能存在改变的情况下。另外,这些措施在第二计算模块中转换为上述变量的改变。
70.从模型计算320获得的上述变量的变化通过第三计算模块330转换成用于所涉及的挖掘/传送装置100、105、120的运行的特定控制指令或修改的控制指令。通过这些控制指令,最终致动335挖掘/传送装置100、105、120。
71.然后返回程序的开始,并且再次记录或确定两个传送系统125、130中的当前材料流300、305。由此,再次计算斗轮挖掘机100的前进速率的适当调节,并且如所述继续该程序,以便允许所述优化过程的自动化。
72.应该强调的是,三个计算模块310、320和330也可以以单个计算模块的形式实现,因为计算架构在当前情况下并不重要。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。