技术特征:
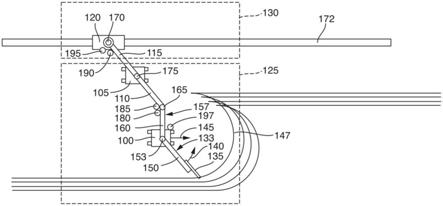
1.一种用于运行传送带系统的方法,所述传送带系统具有至少两个挖掘和/或传送装置(100、105、120),用于移除在挖掘现场(147)挖掘的松散材料,其中,用于转运传送材料的转运点(165、170)分别形成在所述至少两个挖掘和/或传送装置(100、105、120)之间,其特征在于,通过传感器(180、185、190、195、197)确定在相应转运点处涉及的至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向,并且通过基于所确定的空间位置和/或定向来致动(215)在相应转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120),以调节在相应的转运点(165、170)的区域中的所述至少两个挖掘和/或传送装置(100、105、120)的位置和/或定向。2.根据权利要求1所述的方法,其特征在于,通过对在相应的转运点(165、170)的区域中的所述至少两个挖掘和/或传送装置(100、105、120)在运动的相关自由度的开环控制和/或闭环控制(215),执行对在相应的转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120)的自动调节。3.根据权利要求2所述的方法,其特征在于,使用在相应的转运点(165、170)处涉及的挖掘和/或传送装置(100、105、120)的位置和/或在相应的转运点(165、170)处涉及的挖掘和/或传送装置(100、105、120)的水平和/或竖直定向作为相关自由度。4.根据前述权利要求中任一项所述的方法,其特征在于,借助于由传感器确定的、在相应的转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向,通过模型计算来计算在相应的转运点(165、170)处涉及的挖掘和/或传送装置(100、105、120)的适当位置和/或角度数据,借助于在相应的转运点(165、170)处涉及的挖掘和/或传送装置(100、105、120)的适当位置和/或角度数据执行对在相应的转运点(165、170)的区域中的所述挖掘和/或传送装置(100、105、120)精确定向。5.根据前述权利要求中任一项所述的方法,其特征在于,通过雷达借助于至少一个参考物体和/或通过激光雷达和/或通过应答器技术和/或通过基于卫星的gps定位和/或通过相机技术来执行通过传感器对在相应转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向的确定。6.根据权利要求5所述的方法,其特征在于,基于借助于在涉及的所述挖掘和/或传送装置(100、105、120)的装置固有位置和/或运行数据的模型,执行通过传感器对在相应的转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向的确定。7.根据前述权利要求中任一项所述的方法,其特征在于,借助于存在于相应的转运点(165、170)处的传送松散物料的材料排出和/或材料接收行为的渡越时间评估,另外执行对在相应的转运点(165、170)的区域中的所述至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向的调整。8.根据前述权利要求中任一项所述的方法,其特征在于,在对在相应的转运点(165、170)的区域中的所述至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向的调节中,考虑通过在所涉及的所述挖掘和/或传送装置的周围区域中执行的环境检测而检测到的物体。9.根据前述权利要求中任一项所述的方法,其特征在于,基于控制,执行对在相应的转运点(165、170)的区域中对所述至少两个挖掘和/或传送装置(100、105、120)的空间位置
和/或定向的调节,将在相应的转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120)的所述闭环控制或开环控制行为映射到控制结构中。10.根据权利要求9所述的方法,其特征在于,通过通用和/或自学习算法来执行对在相应的转运点(165、170)的区域中的所述至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向的基于控制的调节。11.根据前述权利要求中任一项所述的方法,其特征在于,根据传送过程的变化速度来执行对在相应的转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120)的致动(215)。12.根据前述权利要求中任一项所述的方法,通过具有挖掘机(100)、至少一个带式货车(105)和料斗车(120)的传送带系统来执行,其特征在于,在对相应的转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120)的致动(215)中,使用与所述挖掘机(100)的卸料吊杆(157)相关并且与所述料斗车(120)的位置相关的所述带式货车(105)的前进速率和转动角度作为控制变量。13.根据权利要求12所述的方法,其特征在于,以关于松散材料的材料流(300、305)最佳地利用所述传送带系统(100、105、120)的方式,指定所述挖掘机(100)在所述挖掘现场(147)的方向上的前进速率。14.根据权利要求13所述的方法,其特征在于,通过传感器记录所述传送带系统(100、105、120)的第一传送系统(125)中的第一材料流(300)和所述传送带系统(100、105、120)的第二传送系统(130)中的第二材料流(305),并且在所述第一材料流和所述第二材料流存在差异的情况下,对所述挖掘机(100)的前进速率执行适当的调节,通过所述调节来补偿现有的偏差。15.一种计算机程序,被配置为执行根据权利要求1至14中任一项所述的方法中的每个步骤。16.一种机器可读数据介质,所述机器可读数据介质上存储有根据权利要求15所述的计算机程序。17.一种设备,被配置为通过根据权利要求1至14中任一项所述的方法来控制用于传送岩石形式的材料的传送带系统。18.根据权利要求17所述的设备,其特征在于:传感器系统(180、185、190、195),用于确定在相应的转运点(165、170)处涉及的挖掘和/或传送装置(100、105、120)的空间位置和/或定向(205);计算模块(210),用于借助于所确定的空间位置和/或定向(205)在传送带系统(100、105、120)上执行对挖掘过程的规划;和开环控制器和/或闭环控制器(215),用于借助于计划的挖掘过程致动在相应的转运点(165、170)处涉及的所述挖掘和/或传送装置(100、105、120)。
技术总结
本发明涉及一种用于运行传送系统的方法和设备,所述传送系统具有至少两个挖掘和/或传送装置(100、105、120),用于移除在挖掘现场(147)挖掘的松散材料,其中,用于转运传送材料的转运点(165、170)分别形成在所述至少两个挖掘和/或传送装置(100、105、120)之间,其中特别是设置为,通过传感器(180、185、190、195、197)确定在相应转运点处涉及的至少两个挖掘和/或传送装置(100、105、120)的空间位置和/或定向,并且通过基于所确定的空间位置和/或定向来致动(215)在相应转运点(165、170)处涉及的所述至少两个挖掘和/或传送装置(100、105、120),以调节在相应的转运点(165、170)的区域中的所述至少两个挖掘和/或传送装置(100、105、120)的位置和/或定向。位置和/或定向。位置和/或定向。
技术研发人员:丹尼尔
受保护的技术使用者:蒂森克虏伯股份公司
技术研发日:2020.03.20
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。