技术特征:
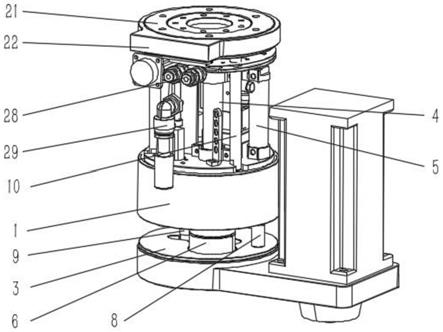
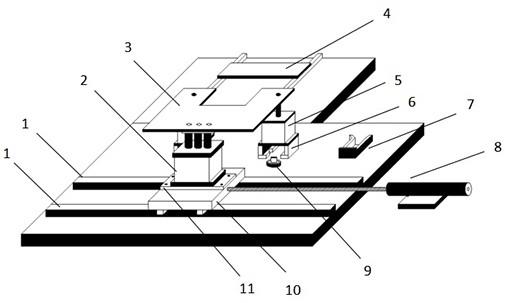
1.一种主动力位补偿器,其特征在于,包括打磨活动端(3)、固定座(1)以及与机器人末端相连的固定端(2),所述固定座(1)设置于所述打磨活动端(3)和所述固定端(2)之间,所述固定座(1)与所述固定端(2)的下端固定连接,所述固定座(1)上设置有用于提供打磨力位补偿的动力组件(4)、用于提供打磨重力补偿的重力平衡组件(5)、用于测量与地面水平夹角的倾角测量组件(12)以及用于测量是否相对地面位置变化的测距组件(11);所述动力组件(4)设置有动力浮动接头(7),所述动力浮动接头(7)的一端与所述动力组件(4)的输出端连接,所述动力浮动接头(7)的另一端与所述打磨活动端(3)连接;所述重力平衡组件(5)设置有平衡浮动接头(8),所述平衡浮动接头(8)的一端与所述重力平衡组件(5)的输出端连接,所述平衡浮动接头(8)的另一端与所述打磨活动端(3)连接;所述固定座(1)与所述打磨活动端(3)之间设置有导向模组(9),所述导向模组(9)的一端与所述固定座(1)固连接,所述导向模组(9)的另一端与所述打磨活动端(3)连接;所述动力浮动接头(7)的下端与所述打磨活动端(3)之间设置有测力组件(6)。2.根据权利要求1所述的一种主动力位补偿器,其特征在于,所述固定端(2)包括缸体(21)以及上端盖(22),所述缸体(21)的顶部设置有安装槽,所述上端盖(22)的下侧封盖于所述安装槽的上侧开口处,所述安装槽内设置有采集卡(25),所述采集卡(25)通过固定板(24)固定于所述安装槽内,所述上端盖(22)的上侧设置有用于与机器人末端法兰连接的上连接法兰(23)。3.根据权利要求2所述的一种主动力位补偿器,其特征在于,所述上端盖(22)与所述固定座(1)之间周向间隔设置有多个支撑杆(10),所述支撑杆(10)的一端与所述上端盖(22)固定连接,所述支撑杆(10)的另一端与所述固定座(1)固定连接。4.根据权利要求2所述的一种主动力位补偿器,其特征在于,所述上端盖(22)的下侧壁与所述缸体(21)的顶端端面之间设置有第一密封圈(26),所述上连接法兰(23)与所述下端盖(33)之间设置有第二密封圈(27)。5.根据权利要求2所述的一种主动力位补偿器,其特征在于,所述缸体(21)的侧面设置有气路安装板,所述气路安装板上设置有气路件(28),所述气路件(28)分别与所述动力组件(4)和所述重力平衡组件(5)气路连接。6.根据权利要求2所述的一种主动力位补偿器,其特征在于,所述缸体(21)上设置有消音器(29)组件,所述消音器(29)组件的一端与所述缸体(21)的侧壁连接。7.根据权利要求1
‑
6任一项所述的一种主动力位补偿器,其特征在于,所述导向模组(9)包括导杆(91)和导套(92),所述导杆(91)与所述导套(92)滑动连接,所述导套(92)与所述固定座(1)固定连接,所述导杆(91)的下端与所述打磨活动端(3)固定连接。8.根据权利要求7所述的一种主动力位补偿器,其特征在于,所述打磨活动端(3)包括打磨电机(32)、打磨座(31)以及下端盖(33),所述打磨电机(32)固定于所述打磨座(31)的一端上侧,所述下端盖(33)固定于所述打磨座(31)的另一端上侧,所述下端盖(33)与所述打磨座(31)之间设置有第三密封圈(34),所述平衡浮动接头(8)、所述导杆(91)以及所述测力组件(6)的下端均与所述下端盖(33)的上侧壁固定连接。9.根据权利要求1
‑
6所述的一种主动力位补偿器,其特征在于,所述测距组件(11)包括测距挡板(113)、滑杆(112)以及固定件(111),所述滑杆(112)设置于所述固定件(111)上,
所述固定件(111)与所述固定座(1)固定连接,所述滑杆(112)与所述测距挡板(113)浮动连接。10.一种根据权利要求1
‑
9任一项所述主动力位补偿器的力位补偿控制方法,其特征在于,所述力位补偿控制方法包括:(一)参数设置:根据待打磨工件的打磨加工要求,设定打磨加工参数,包括打磨加工所需的目标力f1参数设置、打磨活动端的重量m参数设置以及重力平衡组件输出的所需重力补偿的平衡力f2参数设置;(二)倾角测量:倾角测量组件实时测量所述主动力位补偿器与地面的水平夹角β;(三)接触确定:通过测力组件测量到有压力输入用时测距组件测量到与有相对地面位置变化时,确定打磨活动端与待打磨工件接触;(四)输出力计算:接触确定后,根据步骤一的目标力f1、平衡力f2、重量m、以及步骤二的水平夹角β计算得到所述主动力位补偿器的动力组件所需输出的输出力f3,计算公式如下:f3=f1 f2
‑
m*g*cosβ其中,g为重力常数,g=9.8n/kg;(五)输出力输入:将步骤四得到的输出力f3换算为动力组件所需输入的压强p,向所述动力组件提供满足所需压强p的气压;(六)末端力测量:测力组件实时测量末端力,得到末端力f4';(七)末端力判断:判断末端力f4'是否等于目标力f1,若f4'=f1,则动力组件持续输出;若f4'≠f1,根据末端力f4'与目标力f1的差值,调整输入动力组件的气压;(八)调整效验:测力组件测量调整后的末端力,得到末端力f4",判断末端压力f4"是否等于目标力f1,若f4"=f1,则动力组件持续输出;若f4"f1,重新执行步骤(二)至步骤(七),直至f4"=f1。
技术总结
本发明涉及一种主动力位补偿器及其控制方法,主动力位补偿器包括打磨活动端、固定座以及与机器人末端相连的固定端,固定座设置于打磨活动端和固定端之间,固定座与固定端的下端固定连接,固定座上设置有用于提供打磨力位补偿的动力组件、用于提供打磨重力补偿的重力平衡组件、用于测量与地面水平夹角的倾角测量组件以及用于测量是否相对地面位置变化的测距组件;力位补偿控制方法包括:参数设置、倾角测量、接触确定、输出力计算、输出力输入、末端力测量、末端力判断以及调整效验。本发明采用双动力补偿结构,能够适应不同工况下平稳的打磨,能够精确的提供打磨力位补偿,保障打磨的精度,抗干扰能力强。抗干扰能力强。抗干扰能力强。
技术研发人员:吕春年 任君坪 尹洪靖 庹奎 郑登华 王贤福
受保护的技术使用者:重庆智能机器人研究院
技术研发日:2021.08.06
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。