1.本实用新型涉及光刻技术领域,尤其涉及光刻系统。
背景技术:
2.光刻是指利用光学复制的方法把图形印制在光敏记录材料上,然后通过刻蚀的方法将图形转移到晶圆片上来制作电子电路的技术。
3.dmd(digital micromirror device,数字微镜器件)无掩膜光刻技术是从传统光学光刻技术衍生出的一种新技术,因为其曝光成像的方式与传统投影光刻基本相似,区别在于使用数字dmd代替传统的掩膜,其主要原理是通过计算机将所需的光刻图案通过软件输入到dmd芯片中,根据图像中的黑白像素的分布来改变dmd芯片微镜的转角,并通过准直光源照射到dmd芯片上形成与所需图形一致的光图像投射到基片表面,通过控制样品台的移动实现大面积的微结构制备。相对于传统的光刻设备,dmd无掩膜光刻机无需掩膜,节约了生产成本和周期。
4.然而现有方案中,为了增加dmd的扫描清晰度,通常将dmd中的各微镜错开设置,然而在该方案中如果需要更改清晰度,只能更换不同参数的dmd,成本较高。
技术实现要素:
5.本实用新型的目的在于提供一种光刻系统,进而解决现有方案中在需要更改清晰度时需要更换不同参数的dmd更换成本较高的问题。
6.本实用新型的目的采用以下技术方案实现:
7.第一方面,提供了一种光刻系统,所述光刻系统包括:机台、工作台和数字微镜器件dmd,所述dmd设置在所述机台上,所述工作台用于设置被光刻对象,所述dmd所在平面与所述被光刻对象所在平面之间的角度为预设角度γ。
8.通过将dmd所在平面与被光刻对象所在平面之间的角度设置为预设角度,避免了现有方案中在需要更改清晰度时需要更换不同参数的dmd成本较高的问题,达到了可以通过调整dmd所在平面与被光刻对象所在平面之间的角度方便快捷的实现清晰度调整的效果。
9.可选的,所述dmd包括多个微镜,每个所述微镜的形状是矩形,将所述微镜的第一边的长度记为m,将所述微镜的第二边的长度记为n,将目标长度记为p,所述预设角度γ由所述m、所述n和所述p确定。
10.可选的,所述dmd包括在高度方向上叠加设置的k个dmd,k为大于1的整数。
11.通过在高度方向上叠加设置k个dmd,达到了在扫描过程中dmd的扫描精度。
12.可选的,k=2。
13.可选的,所述dmd与所述被光刻对象在第一方向和第二方向上相对运动。
14.通过控制dmd和被光刻对象在第一方向和第二方向上相对运动,避免了现有方案中在需要更改清晰度时需要更换不同参数的dmd成本较高的问题,达到了可以通过调整运
动主体的运动速度进而方便快捷的实现清晰度调整的效果。
15.可选的,dmd固定设置在所述机台上;
16.所述机台同时在所述第一方向和所述第二方向上运动;或者,
17.所述工作台同时在所述第一方向和所述第二方向上运动;或者,
18.所述机台在所述第一方向上运动,同时所述工作台在所述第二方向上运动;或者,
19.所述机台在所述第二方向上运动,同时所述工作台在所述第一方向上运动。
20.通过上述多种控制方式实现dmd和被光刻对象在第一方向和第二方向上的相对运动,达到了可以根据不同应用场景适当选择,提高了实际扫描的灵活度,扩大应用范围的效果。
21.可选的,所述dmd非固定地设置在所述机台上;
22.所述机台在所述第一方向上运动,同时所述dmd在所述第二方向上运动;或者,
23.所述机台在所述第二方向上运动,同时所述dmd在所述第一方向上运动。
24.通过上述多种控制方式实现dmd和被光刻对象在第一方向和第二方向上的相对运动,达到了可以根据不同应用场景适当选择,提高了实际扫描的灵活度,扩大应用范围的效果。
25.可选的,所述dmd非固定地设置在所述机台上;
26.所述工作台在所述第一方向上运动,同时所述dmd在所述第二方向上运动;或者,
27.所述工作台在所述第二方向上运动,同时所述dmd在所述第一方向上运动。
28.通过上述多种控制方式实现dmd和被光刻对象在第一方向和第二方向上的相对运动,达到了可以根据不同应用场景适当选择,提高了实际扫描的灵活度,扩大应用范围的效果。
29.可选的,所述dmd包括多个微镜,每个所述微镜的形状是矩形,将所述微镜的第一边的长度记为m,将所述微镜的第二边的长度记为n,将目标长度记为p,所述dmd与所述被光刻对象之间的相对运动方向与所述第一方向形成的锐角夹角θ由所述m、所述n、所述p和所述γ确定。
30.通过计算θ,进而控制运动主体按照计算得到的θ进行运动,达到了可以准确控制dmd扫描的清晰度的效果。
附图说明
31.下面结合附图和实施例对本实用新型进一步说明。
32.图1是本技术实施例提供的光刻系统的系统示意图;
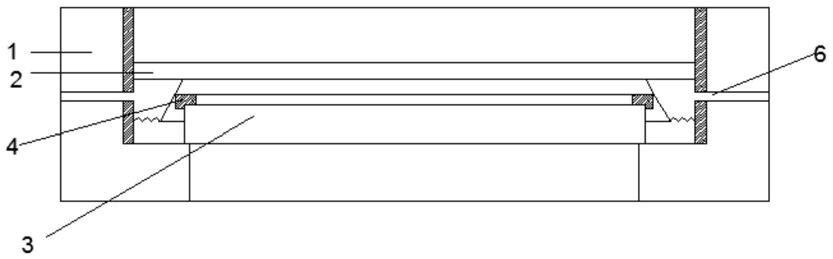
33.图2是本技术实施例提供的光刻系统的立体结构示意图;
34.图3是本技术实施例提供的dmd的结构示意图;
35.图4为本技术实施例提供的光刻系统在扫描过程中的扫描示意图;
36.图5为本技术实施例提供的光刻系统在扫描过程中的另一扫描示意图。
具体实施方式
37.下面,结合附图以及具体实施方式,对本实用新型做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的
实施例。
38.请参考图1,本技术提供的光刻系统包括机台11、工作台12和dmd13,所述dmd13设置在所述机台11上,所述工作台12用于设置被光刻对象100。机台11和工作台12均可以通过机械臂控制进而实现运动,并且,可以通过控制机台11运动进而实现dmd13跟随机台11一起运动,类似的,通过控制工作台12运动可以相应的实现被光刻对象100的运动。上述仅以控制机台11和工作台12运动来举例说明,实际实现时,机台11上的dmd13还可以通过机械臂直接控制来实现运动,类似的,被光刻对象100也可以直接连接机械臂,进而通过控制机械臂运动来实现被光刻对象100的运动。
39.可选的,如图1所示,所述光刻系统中还可以包括其他器件,比如包括dmd控制器14、工作台控制器15、图像生成器16。其中,光源发出的光经过dmd13处理后发送到被光刻对象100;dmd控制器14用于控制dmd13,并且此处所述的控制dmd13包括控制放置dmd13的机台11,或者,在dmd13也可以运动时,dmd控制器14同时用于控制放置dmd13的机台11以及dmd13;类似的,工作台控制器15用于控制工作台12。图像生成器16用于根据dmd13的扫描生成图像,并且在生成图像之后可以发送至其他设备进行处理,在此不再赘述。
40.以控制机台12的机械臂为拖链17来举例说明,请参考图2,其示出了一种可能的光刻系统的结构示意图。
41.在上述光刻系统中,dmd13所在的平面与被光刻对象100所在平面之间的角度为预设角度γ。γ为预先设定的角度,并且,根据实际需求γ可以设置为不同的值,在此不做赘述。
42.dmd13包括多个微镜131,每个微镜131的形状为矩形,多个微镜131组成的dmd13为尺寸更大的矩形,比如,请参考图3,其示出了dmd13的一种可能的结构示意图。实际实现时,dmd13中的微镜131的个数可以根据实际需求设置,比如,为3
×
5的微镜矩阵,又比如,为5
×
8的微镜矩阵等等,本实施例对此并不做限定。
43.将所述微镜131的第一边的长度记为m,将所述微镜131的第二边的长度记为n,将目标长度记为p,所述预设角度γ由所述m、所述n和所述p确定,其具体对应关系本技术并不做限定。
44.在将dmd13所在平面和被光刻对象100所在平面之间的角度设置为预设角度之后,可以根据实际应用需求调整光源的角度和位置,本实施例在此并不做限定。
45.在上述实施例中,dmd13可以有一个,也可以包括在高度方向上叠加设置的k个,k为大于1的整数。高度方向是指被光刻对象100和dmd13的设置方向,也即dmd13处于被光刻对象100的上方,在dmd13包括k个时,k个dmd13可以按照相同的方向叠加。通常情况下k为2,且2个dmd13叠加后交叠部分的宽度根据每个dmd13的宽度以及被光刻对象100的宽度决定,并且根据不同的应用场景叠加的宽度也有所不同,本实施例对此并不做限定。
46.通过叠加k个dmd13,进而通过叠加后的dmd13进行扫描,提高了dmd13的扫描精度。
47.实际实现时,dmd13在光刻扫描过程中,dmd13沿着第一方向扫描一条带,之后dmd13沿着第二方向步进一个dmd13尺寸,继续沿着第一方向的反向扫描一条带,再沿着第二方向的反向步进一个dmd13尺寸之后继续扫描,以此循环,直至全部扫描结束。也即,在本实施例中,第一方向可以为dmd13扫描的主扫描方向,第二方向为dmd13扫描的副扫描方向,副扫描方向为dmd13步进的方向。以下除特殊说明外,均以第一方向为主扫描方向,第二方
向为副扫描方向来举例说明。
48.在上述实施例中,dmd13和被光刻对象100在第一方向和第二方向上相对运动,其相对运动方式可以包括如下几种可能的实现方式:
49.第一种,在dmd13固定设置在机台11上时,运动方式包括:
50.所述机台11同时在所述第一方向和所述第二方向上运动;或者,
51.所述工作台12同时在所述第一方向和所述第二方向上运动;或者,
52.所述机台11在所述第一方向上运动,同时所述工作台12在所述第二方向上运动;或者,
53.所述机台11在所述第二方向上运动,同时所述工作台12在所述第一方向上运动。
54.第二种,在所述dmd13非固定地设置在所述机台11上,相对运动方式包括:
55.所述机台11在所述第一方向上运动,同时所述dmd13在所述第二方向上运动;或者,
56.所述机台11在所述第二方向上运动,同时所述dmd13在所述第一方向上运动。
57.第三种,在所述dmd13非固定地设置在所述机台11上,相对运动方式包括:
58.所述工作台12在所述第一方向上运动,同时所述dmd13在所述第二方向上运动;或者,
59.所述工作台12在所述第二方向上运动,同时所述dmd13在所述第一方向上运动。
60.以上仅以通过上述控制方式控制运动主体运动来举例说明,实际实现时,还可能包括更多的实现方式,本实施例对其具体运动方式并不做限定。
61.在一种可能的实施方式中,dmd13与所述被光刻对象100之间的相对运动方向与所述第一方向形成的锐角夹角θ由所述m、所述n、所述p和所述γ确定。并且,在确定得到θ之后,即可根据确定运动主体在第一方向上的运动速度v1以及在第二方向上相对运动的运动速度v2,请参考图4,其示出了一种可能的光刻扫描方式。确定得到的v2/v1=tanθ。
62.另外,请参考图5,其示出了dmd13和被光刻对象100发生相对运动之后,dmd13光刻扫描的扫描示意图。
63.综上所述,通过提供一种包括机台11、工作台12和数字微镜器件dmd13的光刻系统,所述dmd13设置在所述机台11上,所述工作台12用于设置被光刻对象100,所述dmd13所在平面与所述被光刻对象100所在平面之间的角度为预设角度γ。避免了现有方案中在需要更改清晰度时需要更换不同参数的dmd13成本较高的问题,达到了可以通过调整dmd13所在平面与被光刻对象100所在平面之间的角度方便快捷的实现清晰度调整的效果。
64.此外,实际使用时实现同样的光刻效果,光刻系统的配置可以有多种,在本实施例中,上述光刻系统还可以实现如下功能:
65.第一,获取至少两种光刻配置方案的评价参数,所述评价参数包括硬件配置参数、工艺成本以及工时中的至少一种;
66.可选的,光刻配置方案可以包括多种配置参数,可以根据配置参数与评价参数之间的对应关系来确定每种光刻配置方案的评价参数。其中,配置参数和评价参数之间的对应关系可以为根据大数据预先设置的对应关系。
67.作为另一种可能的实现方式,还可以通过神经网络来获取每种光刻配置方案的评价参数,此时,本步骤可以包括:
68.对于所述至少两种光刻配置方案中的每种光刻配置方案,将所述光刻配置方案的配置参数输入至目标神经网络,所述目标神经网络的输出即为所述光刻配置方案的评价参数,所述目标神经网络为根据样本光刻配置方案的配置参数以及每个样本光刻配置方案的评价参数预先训练得到的网络。
69.光刻配置方案的配置参数可以包括,dmd13的个数、dmd13的精度、dmd13的尺寸中的至少一种。
70.第二,根据每种光刻配置方案的评价参数进行光刻配置推荐。
71.在获取到每种方案的评价参数之后,即可根据评价参数进行光刻配置推荐。可选的,用户在使用光刻系统之前,可以设置自己的使用需求,光刻系统根据用设置的使用需求进行推荐。比如,用户需要清晰度最高,则可以根据各种方案的评价参数推荐清晰度最高的光刻配置方案;又比如,需要成本最低,则可以根据各种方案的评价参数推荐成本最低的光刻配置方案,在此不再赘述。
72.本实用新型从使用目的上,效能上,进步及新颖性等观点进行阐述,其设置有的实用进步性,已符合专利法所强调的功能增进及使用要件,本实用新型以上的说明及附图,仅为本实用新型的较佳实施例而已,并非以此局限本实用新型,因此,凡一切与本实用新型构造,装置,特征等近似、雷同的,即凡依本实用新型专利申请范围所作的等同替换或修饰等,皆应属本实用新型的专利申请保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。