1.一种2自由度快速反射镜属于返反射镜技术领域。
背景技术:
2.随着科学技术的不断发展,各行业各的技术都有了质得飞跃,尤其是快速反射镜行业,快速反射镜主要用于航空航天领域,近年来随着中小型无人机的市场化,小型航空相机的也逐步被应用于各种航拍当中,快速反射镜的主要作用的是调节目标光源与接受器之间的光束传播方向,传统快速反射镜结构复杂、响应速度慢、定位精度低,为此我们设计了一款一种2自由度快速反射镜,其特点是高精度、高相应速度、高稳定性,鉴于此一种2自由度快速反射镜正是业内急需。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种2自由度快速反射镜,解决了传统反射镜结构复杂、响应速度慢、定位精度低等问题。
4.本实用新型解决其技术问题是采取以下技术方案实现的:
5.一种2自由度快速反射镜,是由旋转机构、摆动机构组成,其中旋转机构与摆动机构通过旋转机构中的固定片连接固定,通过旋转机构中的微步进电机旋转运动,带动摆动机构做旋转运动,摆动机构中的微步进电机旋转带动摆动机构旋转运动,从而完成带动反射镜做自由度运动,从而完成对光线的反射,在摆动机构中设置有硅位移传感器与固定架嵌入式连接,在固定架内圈安装有压电陶瓷,通过硅位移传感器探测光线角度,把探测数据实时传输给压电陶瓷,通过压电陶瓷驱动带动反射镜片进行二次微调完成工作。
附图说明
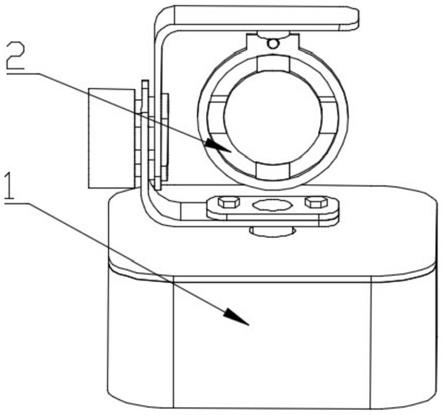
6.参阅图1是一种2自由度快速反射镜的结构图;
7.参阅图2、图3是图1中旋转机构1的结构示意图;
8.参阅图4是图1中摆动机构2的结构示意图;
具体实施方式
9.参阅图1、图2、图3、图4,本具体实施方式的一种2自由快速反射镜,是由旋转机构1、摆动机构2组成,其中旋转机构1与摆动机构2通过旋转机构1 中的下固定板104连接固定,通过旋转机构1中的下微步进电机105旋转运动,带动摆动机构2做旋转运动,摆动机构2中的微步进电机201旋转带动摆动机构 2旋转运动,从而完成带动反射镜片208做2自由度运动,从而完成对光线的反射,在摆动机构2中设置有硅位移传感器209与固定架206通过螺栓连接,在固定架206内圈安装有压电陶瓷207,通过硅位移传感器209探测光线角度,把探测数据实时传输给压电陶瓷207,通过压电陶瓷207驱动带动反射镜片208进行二次微调完成工作。
10.参阅图2、图3,旋转机构1是由顶盖101、底壳102、十字固定架103、下固定板104、下微步进电机105组成,其中顶盖101与底壳102通过螺栓连接固定,下微步进电机105与底壳102通过十字固定架103连接固定,下固定板104 与下微步进电机105头部旋转轴通过过盈配合连接。
11.参阅图4,摆动机构2是由微步进电机201、固定板202、旋转臂203、摆动臂204、固定座205、固定架206、压电陶瓷207、反射镜片208、硅位移传感器 209组成,其中微步进电机201与固定板202通过过盈配合连接,旋转臂203与微步进电机201前端通过螺栓锁紧,摆动臂204与微步进电机201头部旋转轴通过固定板202连接固定,固定座205与摆动臂204通过螺栓固定连接,固定架 206与固定座205通过螺栓锁紧固定,压电陶瓷207与固定架206通过焊接方式连接固定,反射镜片208与压电陶瓷207通过螺栓连接固定,硅位移传感器209 与固定架206通过螺栓连接固定。
12.需要强调的是,本实用新型中的压电陶瓷、微步进电机、固定架、旋转臂、摆动臂、硅传感器等等,均属于本领域技术人员所能够理解,基于本实用新型提供的技术方案能够实施的,在此不予赘述。本领域技术人员应该理解,本领域技术人员结合现有技术以及上述实施例可以实现所述变化例,在此不予赘述。这样的变化例并不影响本发明的实质内容,在此不予赘述。以上对本发明的较佳实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;任何熟悉本领域的技术人员,在不脱离本发明技术方案作出许多可能的变动和修饰,或修改为等同变化的等效实施例,这并不影响本发明的实质内容。因此凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
技术特征:
1.一种2自由度快速反射镜,其特征是,是由旋转机构(1)、摆动机构(2)组成,其中旋转机构(1)与摆动机构(2)通过旋转机构(1)中的下固定板(104)连接固定,通过旋转机构(1)中的下微步进电机(105)旋转运动,带动摆动机构(2)做旋转运动,摆动机构(2)中的微步进电机(201)旋转带动摆动机构(2)旋转运动,从而完成带动反射镜片(208)做2自由度运动,从而完成对光线的反射,在摆动机构(2)中设置有硅位移传感器(209)与固定架(206)通过螺栓连接,在固定架(206)内圈安装有压电陶瓷(207),通过硅位移传感器(209)探测光线角度,把探测数据实时传输给压电陶瓷(207),通过压电陶瓷(207)驱动带动反射镜片(208)进行二次微调完成工作。2.根据权利要求1所述一种2自由度快速反射镜,其特征是,旋转机构(1)是由顶盖(101)、底壳(102)、十字固定架(103)、下固定板(104)、下微步进电机(105)组成,其中顶盖(101)与底壳(102)通过螺栓连接固定,下微步进电机(105)与底壳(102)通过十字固定架(103)连接固定,下固定板(104)与下微步进电机(105)头部旋转轴通过过盈配合连接。3.根据权利要求1所述一种2自由度快速反射镜,其特征是,摆动机构(2)是由微步进电机(201)、固定板(202)、旋转臂(203)、摆动臂(204)、固定座(205)、固定架(206)、压电陶瓷(207)、反射镜片(208)、硅位移传感器(209)组成,其中微步进电机(201)与固定板(202)通过过盈配合连接,旋转臂(203)与微步进电机(201)前端通过螺栓锁紧,摆动臂(204)与微步进电机(201)头部旋转轴通过固定板(202)连接固定,固定座(205)与摆动臂(204)通过螺栓固定连接,固定架(206)与固定座(205)通过螺栓锁紧固定,压电陶瓷(207)与固定架(206)通过焊接方式连接固定,反射镜片(208)与压电陶瓷(207)通过螺栓连接固定,硅位移传感器(209)与固定架(206)通过螺栓连接固定。
技术总结
一种2自由度快速反射镜,是由旋转机构、摆动机构组成,其中旋转机构与摆动机构通过旋转机构中的固定片连接固定,通过旋转机构中的微步进电机旋转运动,带动摆动机构做旋转运动,摆动机构中的微步进电机旋转带动摆动机构旋转运动,从而完成带动反射镜做自由度运动,从而完成对光线的反射,在摆动机构中设置有硅位移传感器与固定架嵌入式连接,在固定架内圈安装有压电陶瓷,通过硅位移传感器探测光线角度,把探测数据实时传输给压电陶瓷,通过压电陶瓷驱动带动反射镜片进行二次微调完成工作。陶瓷驱动带动反射镜片进行二次微调完成工作。陶瓷驱动带动反射镜片进行二次微调完成工作。
技术研发人员:王南 杨柏涛 孙佳丽 丁向东 顾宪强 姜君 任元 张曦予 陈玉丹 徐志峰 张昊 姜忠雪
受保护的技术使用者:长春市求以得科技有限公司
技术研发日:2021.01.07
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。