一种机械臂可变式c型传感器
技术领域
1.本实用涉及机械臂传感器技术方面领域,主要涉及到一种机械臂可变式c型传感器。
背景技术:
2.随着机械行业的快速进步发展的同时,当前对于机械行业的生产和使用,机械的使用基本都是需要传感器对机械结构的受力情况进行采集,并且进行有效的监控作用,现阶段所采用的主要是传感器来对机械臂进行传感器应力采集,尤其是对于c型传感器的使用,但是传统的c型传感器结构固定,主要是通过滑动杆对应力感应球进行顶紧式的固定,但是在推进时会在滑动杆上出现旋转扭力,并且会把旋转扭力传送到应力感应球上,会导致应力球的应力采集数据出现误差,导致测量精度较低,数据采集不准确。
3.因此,提供一种机械臂可变式c型传感器,通过对机械臂的c型传感器的结构进行优益改进,在应力感应球和传感器架侧壁之间设置旋转推动式微调节装置,能够有效的实现滑动杆的无旋转式推进,能够有效的避免推进式的旋转扭力传输对应力感应球的应力采集影响,能够有效的避免数据采集误差,有效的提高应力采集的精度,能够有效的提高刺激精准度,同时,本技术采用手动式的旋转微调节推进,既能够有效的避免旋转应力的影响,还能够有效的提高推进精度,进行精准的为调节,且本技术的结构简单,制作和更换方便,有利于广泛使用和生产,降低c型传感器的生产制造成本,就成为本领域技术人员亟需解决的问题。
技术实现要素:
4.本实用新型的目的是提供一种机械臂可变式c型传感器,通过对机械臂的c型传感器的结构进行优益改进,在应力感应球和传感器架侧壁之间设置旋转推动式微调节装置,能够有效的实现滑动杆的无旋转式推进,能够有效的避免推进式的旋转扭力传输对应力感应球的应力采集影响,能够有效的避免数据采集误差,有效的提高应力采集的精度,能够有效的提高刺激精准度,同时,本技术采用手动式的旋转微调节推进,既能够有效的避免旋转应力的影响,还能够有效的提高推进精度,进行精准的为调节,且本技术的结构简单,制作和更换方便,有利于广泛使用和生产,降低c型传感器的生产制造成本。
5.为解决背景技术中所述技术问题,本实用新型采用以下技术方案:
6.一种机械臂可变式c型传感器,包括传感器架和应力感应球,所述的传感器架设为c型结构,所述的传感器架一侧壁上设有支撑块,所述的传感器架的两臂之间设有应力感应球,所述的应力感应球一侧直接与支撑块接触式连接,应力感应球另一侧通过顶紧式固定装置与传感器架的另一侧壁连接,所述的顶紧式固定装置包括顶紧块和滑动杆,所述的滑动杆一端穿过传感器架另一侧壁上的滑动孔后与顶紧块一侧连接,所述的顶紧块另一侧直接与应力感应球接触式连接,所述的滑动杆上的连接环与传感器架侧壁之间通过旋转推动式微调节的微调节装置。
7.优选地,所述的微调节装置包括旋转调节杆、平推块和调节环,所述的传感器架外端上设有调节固定块,所述的调节环一端垂直固定在调节固定块上,所述的平推块垂直固定在连接环侧壁上,所述的旋转调节块一端嵌入到调节环另一端的调节槽内,旋转调节杆另一端穿过平推块的旋转孔连接,手动式的旋转微调节推进,既能够有效的避免旋转应力的影响,还能够有效的提高推进精度,进行精准的为调节。
8.优选地,所述的平推块两侧的旋转调节杆上对称设有定位块,能够有效的实现推进跟随,提高推动时的稳定程度。
9.优选地,所述的平推块的旋转孔内设有滚轴式的旋转轴承套,能够有效的降低旋转时的摩擦力,能够使推进更加顺滑。
10.优选地,所述的调节环表面均匀设有倾斜设置的交叉螺纹。
11.优选地,所述的滑动杆的侧壁上设有平滑挡块,所述的平滑挡块滑动嵌入到滑动孔内壁上对应的平滑槽内,所述的平滑挡块和平滑槽相互配合,能够有效的避免滑动杆出现旋转应力。
12.优选地,所述的滑动杆的侧壁还均匀设有限位块,且所述的限位块设为半球状结构。
13.优选地,所述的传感器架的内壁上还设有稳定块,所述的稳定块、顶紧块和顶紧块和与应力感应球的接触端均设有向内的球面结构的限位槽。
14.本实用新型的有益效果是:
15.1)、在应力感应球和传感器架侧壁之间设置旋转推动式微调节装置,能够有效的实现滑动杆的无旋转式推进,能够有效的避免推进式的旋转扭力传输对应力感应球的应力采集影响,能够有效的避免数据采集误差,有效的提高应力采集的精度,能够有效的提高刺激精准度。
16.2)、同时,本技术采用手动式的旋转微调节推进,既能够有效的避免旋转应力的影响,还能够有效的提高推进精度,进行精准的为调节。
17.3)、且本技术的结构简单,制作和更换方便,有利于广泛使用和生产,降低c型传感器的生产制造成本。
附图说明
18.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
19.图1为本实用新型一种机械臂可变式c型传感器的结构示意图。
具体实施方式
20.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将对本实用新型作进一步的详细介绍。
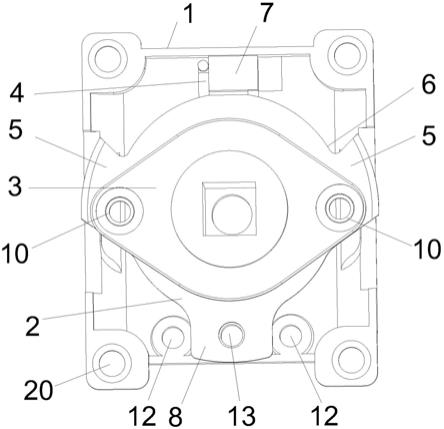
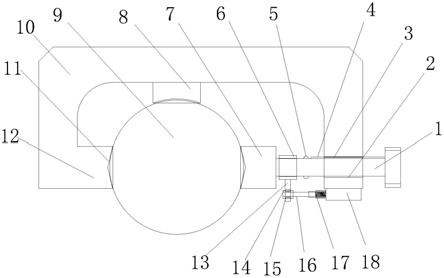
21.请参考图1,一种机械臂可变式c型传感器,包括传感器架10和应力感应球9,所述的传感器架10设为c型结构,所述的传感器架10一侧壁上设有支撑块12,所述的传感器架10的两臂之间设有应力感应球9,所述的应力感应球一侧直接与支撑块12接触式连接,应力感
应球9另一侧通过顶紧式固定装置与传感器架10的另一侧壁连接,所述的顶紧式固定装置包括顶紧块7和滑动杆1,所述的滑动杆1一端穿过传感器架10另一侧壁上的滑动孔2后与顶紧块7一侧连接,所述的顶紧块7另一侧直接与应力感应球9接触式连接,所述的滑动杆1上的连接环6与传感器架10侧壁之间通过旋转推动式微调节的微调节装置。
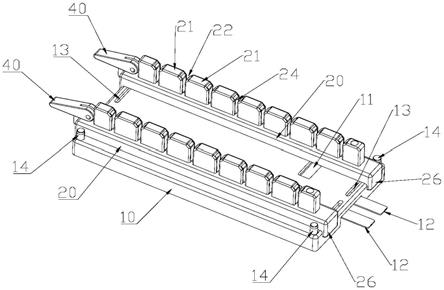
22.本实施例中,所述的微调节装置包括旋转调节杆16、平推块13和调节环17,所述的传感器架10外端上设有调节固定块18,所述的调节环17一端垂直固定在调节固定块18上,所述的平推块13垂直固定在连接环17侧壁上,所述的旋转调节杆16一端嵌入到调节环17另一端的调节槽内,旋转调节块16另一端穿过平推块13的旋转孔15连接,手动式的旋转微调节推进,既能够有效的避免旋转应力的影响,还能够有效的提高推进精度,进行精准的为调节。
23.本实施例中,所述的平推块13两侧的旋转调节杆16上对称设有定位块14,能够有效的实现推进跟随,提高推动时的稳定程度。
24.本实施例中,所述的平推块13的旋转孔15内设有滚轴式的旋转轴承套,能够有效的降低旋转时的摩擦力,能够使推进更加顺滑。
25.本实施例中,所述的调节环17表面均匀设有倾斜设置的交叉螺纹。
26.本实施例中,所述的滑动杆1的侧壁上设有平滑挡块4,所述的平滑挡块4滑动嵌入到滑动孔2内壁上对应的平滑槽3内,所述的平滑挡块4和平滑槽3相互配合,能够有效的避免滑动杆1出现旋转应力。
27.本实施例中,所述的滑动杆1的侧壁还均匀设有限位块5,且所述的限位块5设为半球状结构。
28.本实施例中,所述的传感器架10的内壁上还设有稳定块8,所述的稳定块8、顶紧块7和顶紧块12和与应力感应球9的接触端均设有向内的球面结构的限位槽11。
29.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。