1.本发明涉及空气悬架导向臂制造领域,具体为一种导向臂自动打磨系统及自动打磨方法。
背景技术:
2.空气悬架导向臂是商用车的一个重要部件,在空气悬架中起承载和导向作用,受力复杂,其表面质量对疲劳寿命影响很大。导向臂制造需经过轧制、弯曲、扭转成型和热处理等多个热加工工序,因此工件三维尺寸波动较大、表面存在压痕和微裂纹等少量缺陷。
3.为消除表面缺陷,目前的方法是,人工用吊具将工件吊装到工作台板上,手持角磨机人工打磨,打磨质量依赖操作者的经验很不稳定,同时存在效率低、劳动强度大、作业环境差等问题,不能满足导向臂的批量生产的需求。
技术实现要素:
4.针对现有技术中存在的导向臂打磨质量不稳定和效率低下的问题,本方案提供了一种针对导向臂自动打磨的方法,用于提高打磨质量和提高打磨效率。
5.本发明提供的具体方案如下:
6.导向臂自动打磨系统,包括
7.第一机器人,其末端安装有机械抓手;所述第一机器人用于实现对导向臂的上料和下料;
8.打磨台,用于导向臂的放置;所述打磨台上设置有用于实现对导向臂宽度方向夹紧的第一夹紧装置和对导向臂厚度方向夹紧的第二夹紧装置;所述第一机器人将导向臂放置到所述打磨台上并由所述第一夹紧装置、第二夹紧装置进行夹紧;和
9.第二机器人,其末端安装有恒力控制装置和打磨头,所述第二机器人用于实现对所述导向臂的打磨。
10.进一步的,所述第一机器人的末端处还安装有视觉检测装置,所述视觉检测装置用于对所述导向臂进行两次扫描;其中第一次扫描确定导向臂的中心孔,以引导所述机械抓手抓取所述导向臂中心孔部位后上料放置到所述打磨台上;第二次扫描获取固定在所述打磨台上的导向臂需打磨区域的详细特征,并上传到上位机生成打磨路径,传给第二机器人按照打磨路径执行打磨。
11.进一步的,所述视觉检测装置还包括底板、结构光源和相机,所述结构光源和相机固定在所述底板上,所述结构光源为所述相机提供光源,所述相机与所述上位机电连接。
12.进一步的,所述第一夹紧装置包括驱动器、两组对称布置的水平滑块和两组夹紧体;
13.所述驱动器固定连接在机架上板上;两组水平滑块滑动连接在所述驱动器的导向轨道内,所述夹紧体分别与所述水平滑块一一对应固定;两组所述夹紧体相对的内侧固定有夹紧板,所述驱动器驱动所述水平滑块、夹紧体和夹紧板一起相对运动以在导向臂宽度
方向实现对所述导向臂的夹紧或者松开。
14.进一步的,所述第二夹紧装置包括夹具座和设置在所述夹具座左右两侧的夹紧执行机构;
15.所述夹具座固定在机架中板上;
16.所述夹紧执行机构包括直线夹紧缸、第一连杆、压紧臂和第二连杆;所述直线夹紧缸固定在所述夹具座上;所述第一连杆的下端通过螺纹与所述直线夹紧缸的活塞杆连接;上端通过第一销轴连接压紧臂;所述第二连杆的上端通过第二销轴与所述压紧臂的中部连接,下端通过第三销轴转动支撑在所述夹具座上;
17.所述直线夹紧缸的运动带动所述第一连杆上下移动,以推动所述压紧臂绕第二销轴旋转,从而在导向臂厚度方向实现对导向臂的向下压紧或向上松开。
18.进一步的,每个所述压紧臂上用于夹紧所述导向臂的端面均设有可拆卸的压块,所述压紧臂通过所述压块实现对所述导向臂的压紧。
19.进一步的,所述第一夹紧装置和所述第二夹紧装置上均设有行程开关,所述行程开关用于感知不同宽度、厚度的导向臂,使得所述第一夹紧装置和所述第二夹紧装置对所述导向臂夹紧。
20.采用本技术方案所达到的有益效果为:
21.1.通过在打磨台上设置夹紧装置(第一夹紧装置和第二夹紧装置),实现对导向臂上下左右的同步夹紧,为打磨质量的提升提供了极大地促进作用;同时利用机器人及视觉系统,自动规划打磨路径,利用恒力控制磨头控制打磨参数,也提高了打磨质量。
22.2.第一机器人负责上下料和扫描检测、第二机器人负责打磨、相互配合打磨的设计,使打磨效率大大提高,自动打磨生产率是人工打磨的3倍;并且通过自动化连线,降低了劳动强度,改善了作业环境,具有良好的综合经济效益,便于推广。
23.对于此,本方案提出了具体的打磨方法,具体包括如下步骤:
24.s1:第一机器人移动至上料架上方,视觉检测装置对导向臂进行一次扫描,确定导向臂位置,引导第一机器人上的机械抓手抓取导向臂至打磨台;
25.s2:导向臂在打磨台上,一端支承在支承块上,另一端支承在第二夹紧装置的夹具座上,机械抓手松开导向臂后,第一夹紧装置和第二夹紧装置分别从宽度方向和厚度方向对导向臂进行夹紧;
26.s3:第一机器人移至被夹紧的导向臂位上方,视觉检测装置对导向臂做二次扫描,获取打磨部位的详细几何特征,上传到上位机系统,生成打磨路径并传给第二机器人,第一机器人完成扫描后从打磨台返回上料架;
27.s4:第二机器人移至打磨台,按照规划的打磨路径带动打磨头依次进行粗磨、更换细打磨头、细磨工作,完成细磨后第二机器人移至磨具架更换粗打磨头,返回原位等待打磨台的控制信号;第一夹紧装置和第二夹紧装置松开并发出控制信号到第一机器人;
28.s5:第一机器人引导机械抓手抓取打磨完的导向臂移至下料架顺序摆放,放下导向臂后第一机器人返回上料架;
29.s6:循环重复以上步骤。
30.为了进一步的提高打磨效率,本方案特地将打磨台设置为两台,即打磨台包括第一打磨台和第二打磨台,两台所述打磨台对称分布在所述第一机器人和第二机器人之间,
基于两台打磨台,具体打磨包括如下步骤:
31.s1:第一机器人移动至上料架上方,视觉检测装置对导向臂进行一次扫描,确定导向臂位置,引导第一机器人上的机械抓手抓取导向臂至第一打磨台;
32.s2:导向臂在第一打磨台上,一端支承在支承块上,另一端支承在第二夹紧装置的夹具座上,机械抓手松开导向臂后,第一夹紧装置和第二夹紧装置分别从宽度方向和厚度方向对导向臂进行夹紧;
33.s3:第一机器人移至被夹紧的导向臂位上方,视觉检测装置对导向臂做二次扫描,获取打磨部位的详细几何特征,上传到上位机系统,生成打磨路径并传给第二机器人,第一机器人完成扫描后从第一打磨台返回上料架;
34.s4:第一机器人返回上料架后,重复s1的抓取将另一导向臂抓取至第二打磨台,继续重复s2、s3,完成扫描后返回原位等待,在第一机器人返回上料架的同时,第二机器人移至第一打磨台,按照规划的打磨路径带动打磨头依次进行粗磨、更换细打磨头、细磨工作,完成细磨后第二机器人移至磨具架更换粗打磨头;
35.s5:完成步骤s4后,第一打磨台发出第一夹紧装置和第二夹紧装置松开导向臂信号,第一机器人抓取第一打磨台上打磨完的导向臂移至下料架顺序摆放,放下导向臂后第一机器人返回上料架;
36.s6:完成步骤s4后,第二机器人再移至第二打磨台,按照规划的路径带动打磨头依次进行粗磨、更换细打磨头、细磨工作,完成细磨后第二机器人移至磨具架更换粗打磨头,返回原位等待第一打磨台的控制信号;
37.s7:第二打磨台发出第一夹紧装置和第二夹紧装置松开导向臂信号,第一机器人抓取第二打磨台上打磨完的导向臂移至下料架顺序摆放,放下导向臂后第一机器人返回上料架;
38.s8:依次重复循环以上步骤。
39.通过采用双打磨台的设计,配合第一机器人和第二机器人的来回配合使用,对于进一步提高打磨效率拥有极大地促进作用。
附图说明
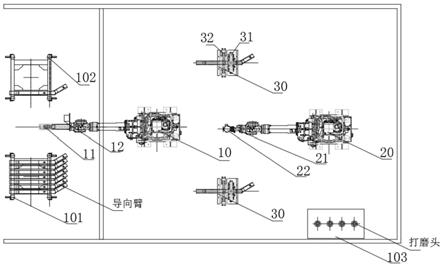
40.图1为本方案导向臂自动打磨系统的整体布局示意图。
41.图2为第一机器人的主视结构图。
42.图3为图2中m向的向视图。
43.图4为第二机器人的主视结构图。
44.图5为导向臂放置在打磨台上进行夹紧的平面结构图。
45.图6为图5中a-a的剖面展示图,展示第二夹紧装置的结构。
46.图7为图6中p向的向视图。
47.图8为图6中q向的向视图。
48.图9为第二夹紧装置松开状态的动作图。
49.图10为图5中b-b剖面展示图,展示第一夹紧装置的结构。
50.其中:10第一机器人、11机械抓手、12视觉检测装置、20第二机器人、21恒力控制装置、22打磨头、30打磨台、31第一夹紧装置、32第二夹紧装置、33工件检测开关、34机架上板、
35机架中板、101上料架、102下料架、103磨具架、131支架、132导向座、133第一滑动轴承、134连接杆、135抓手第一连接板、136抓手第二连接板、137抓手第三连接板、138第二滑动轴承、139弹性挡圈、311驱动器、312水平滑块、313夹紧体、314夹紧板、321夹具座、322直线夹紧缸、323第一连杆、324压紧臂、325第二连杆。
具体实施方式
51.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
52.本实施例提供了一种导向臂自动打磨系统,通过利用该自动打磨系统代替传统的靠经验进行人工打磨的方式,并且通过采用本打磨系统,对于改善打磨质量和提高打磨效率具有极大的促进作用。
53.具体的,参见图1,导向臂自动打磨系统包括第一机器人10、第二机器人20和打磨台30,打磨台30布置设置在第一机器人10和第二机器人20之间;导向臂自动打磨系统中还设置了上料架101、下料架102、磨具架103。
54.在第一机器人10的末端(即安装端)安装有机械抓手11;第一机器人10通过驱使机械抓手11实现从上料架101上对导向臂的抓取或者将打磨完成的导向臂按顺序放置到下料架102上;打磨台30主要用于导向臂的放置;本方案中在打磨台30上设置有用于实现对导向臂宽度方向夹紧的第一夹紧装置31和对导向臂厚度方向夹紧的第二夹紧装置32;为了保证打磨质量的稳定性,需要对放置到所述打磨台30上的导向臂进行全方位的夹紧,使得导向臂在上下左右方向均保持稳定,因此,在第一机器人10抓取导向臂放置到打磨台30上后,第一夹紧装置31、第二夹紧装置32配合动作以完成对导向臂的全方位夹紧;第二机器人20主要用于实现对导向臂的打磨,在第二机器人的末端(即安装端)安装有恒力控制装置21、电机和打磨头22,电机固连在恒力控制装置21上,打磨头22通过快速夹持装置与电机输出轴连接,在进行具体打磨时,恒力控制装置21可以保证打磨头22施加在导向臂上的打磨力的均衡,以提高打磨质量;磨具架103用于放置多个备用的粗细打磨头22,以实现自动更换。
55.本实施例中,在第一机器人10的末端处还安装有视觉检测装置12,视觉检测装置12为本方案中重要的组成构件,主要起到两个作用,即视觉检测装置12用于对导向臂进行两次扫描:
56.其一:在第一机器人10对导向臂进行上料抓取时的扫描,即利用视觉检测装置12扫描确定放置在上料架101上的导向臂的中心孔,以引导机械抓手11抓取导向臂中心孔部位后上料放置到打磨台30上。
57.其二:在导向臂被第一夹紧装置31、第二夹紧装置32夹紧后,视觉检测装置12扫描获取固定在打磨台30上的导向臂需打磨区域的详细特征,并上传到上位机生成打磨路径,传给第二机器人20按照打磨路径执行打磨。
58.相比于不采用视觉检测装置12,本方案通过设置视觉检测装置12,使得机器人对导向臂的抓取和打磨将变得更加的精确;通过将扫描确定中心孔功能和扫描确定打磨区域特征功能相结合,实现了利用一个装置(视觉检测装置12)在不同工序上的适用,相比于传统的不同工序需要单独视觉检测装置12的方案,本方案更加有利于降低企业的成本投入。
59.可选的,视觉检测装置12还包括底板、结构光源和相机,结构光源和相机固定在底
板上,结构光源为相机提供光源,相机与上位机电连接。
60.本实施例中,参见图2-图3,机械抓手11通过支架131与法兰盘连接,支架131下部连接板上固定安装两个导向座132,导向座132内镶有第一滑动轴承133,连接杆134滑动连接在第一滑动轴承133内,连接杆134下端与抓手第一连接板135通过锁紧螺母固定,抓手第二连接板136通过第一连接销与抓手第一连接板135转动连接,抓手第二连接板136通过两个对称布置的第二连接销与两个抓手第三连接板137转动连接,抓手第三连接板137转动连接处均镶有第二滑动轴承138,第二连接销轴向用弹性挡圈139限位,抓手第三连接板137下固定有两个电磁铁。
61.优选的,抓手第一连接板135上安装了两个限位装置,以限制第一连接销的过量摆动,机械抓手11与导向臂接触处设检测开关装置,机械抓手11外侧设置防护罩。
62.本实施例中,参见图4,恒力控制装置21另一端与电机固连,电机输出端与打磨头22相连接,打磨头22磨具分为两种,粗打磨头磨具为金刚石平面砂轮,细打磨头磨具为平面砂布轮,打磨头22与电机主轴采用气动快换夹紧结构,磨具架103上分别放置多个粗细打磨头22,更换打磨头22由第二机器人自动完成。
63.优选的,恒力控制装置21的组成包括:力传感器、位移传感器、加速度传感器等。
64.优选的,第一机器人10和第二机器人20采用六轴机器人。
65.可选的,参见图5,在打磨台30上的左右两端各设置有一个工件检测开关33,该工件检测开关33用于感知是否有工件(导向臂)放入,在检测有导向臂放置后发出信号控制第一夹紧装置31、第二夹紧装置32进行夹紧操作;并且在导向臂打磨部位的下方设有接屑盘。
66.可选的,打磨台区域设置粉尘收集管道和除尘系统。
67.为了便于第一夹紧装置31、第二夹紧装置32的安装,打磨台30上还设置有机架上板34和机架中板35。
68.本实施例中,参见图10,第一夹紧装置31包括驱动器311、两组对称布置的水平滑块312和两组夹紧体313;,其中驱动器311固定连接在机架上板34上;两组水平滑块312滑动连接在驱动器311的导向轨道内,夹紧体313分别与水平滑块312一一对应固定;两组夹紧体313相对的内侧固定有夹紧板314,驱动器311驱动水平滑块312、夹紧体313和夹紧板314一起相对运动以在导向臂宽度方向实现对导向臂的夹紧或者松开。
69.可以理解为,在第一夹紧装置31中,通过驱动器311、水平滑块312、夹紧体313和夹紧板314彼此配合,实现对导向臂在左右方向(宽度方向)上的夹紧。
70.可选的,第一夹紧装置31夹紧行程可调,其松夹和夹紧位置由行程开关控制,该行程开关用于感知导向臂的宽度,其夹紧力可通过调节驱动器311的工作压力来调整。
71.本实施例中,参见图6-图8,第二夹紧装置32包括夹具座321和设置在夹具座321左右两侧的夹紧执行机构;其中夹具座321固定在机架中板35上;每个夹紧执行机构包括直线夹紧缸322、第一连杆323、压紧臂324和第二连杆325;直线夹紧缸322固定在夹具座321上;第一连杆323的下端通过螺纹与直线夹紧缸322的活塞杆连接;第一连杆323的上端通过第一销轴连接压紧臂324;第二连杆325的上端通过第二销轴与压紧臂324的中部连接,第二连杆325的下端通过第三销轴转动支撑在夹具座321上。
72.在具体工作时,位于夹具座321左右两侧的直线夹紧缸322开始伸缩运动,带动第一连杆323上下移动,第一连杆323推动压紧臂324绕第二销轴旋转,压紧臂324的压紧端在
导向臂厚度方向实现对导向臂的向下压紧或向上松开。
73.这里通过利用两个压紧臂324旋转开合的方式实现对导向臂的夹紧,有利于导向臂的放置;即在导向臂准备放入时,两个直线夹紧缸322回缩,使得两个压紧臂324形成方便导向臂竖直直接放入的放置口(参见图9),在导向臂放入完成后,两个直线夹紧缸322伸出,使得压紧臂324绕第二销轴旋转实现对导向臂的夹紧(参见图6)。
74.需要注意的是,第二连杆325这里主要用于为压紧臂324提供可转动的支点,同时为了保证压紧臂324的正常运动的路径行程,应保证第二连杆325不被固定,即第二连杆325的一端通过第二销轴与压紧臂324转动铰接,其另一端通过第三销轴与夹具座321转动铰接。
75.可选的,考虑到压紧的使用频率,可能会对压紧臂324的压紧端造成一定的磨损,为了避免频繁拆卸压紧臂324造成压紧精度的偏移,本方案在每个压紧臂324上用于夹紧导向臂的端面(即压紧端)均设有可拆卸的压块,压紧臂324通过压块实现对导向臂的压紧;这样即使压块受到磨损,操作者仅仅需要快速更换压块即可,方便操作使用。
76.可选的,第二夹紧装置32夹紧行程可调,在直线夹紧缸322旁设行程开关控制,该行程开关用于感知导向臂的厚度,其夹紧力可通过调节直线夹紧缸322的工作压力实现调整。
77.优选的,作业区域设安全围栏。
78.下面对具体的打磨方法做详细步骤介绍:
79.实施例一(打磨台仅为一台的打磨方法)
80.s1:第一机器人移动至上料架上方,视觉检测装置对导向臂进行一次扫描,确定导向臂位置,引导第一机器人上的机械抓手抓取导向臂至打磨台;
81.s2:导向臂在打磨台上,一端支承在支承块上,另一端支承在第二夹紧装置的夹具座上,机械抓手松开导向臂后,第一夹紧装置和第二夹紧装置分别从宽度方向和厚度方向对导向臂进行夹紧;
82.s3:第一机器人移至被夹紧的导向臂位上方,视觉检测装置对导向臂做二次扫描,获取打磨部位的详细几何特征,上传到上位机系统,生成打磨路径并传给第二机器人,第一机器人完成扫描后从打磨台返回上料架;
83.s4:第二机器人移至打磨台,按照规划的打磨路径带动打磨头依次进行粗磨、更换细打磨头、细磨工作,完成细磨后第二机器人移至磨具架更换粗打磨头,返回原位等待打磨台的控制信号;第一夹紧装置和第二夹紧装置松开并发出控制信号到第一机器人;
84.s5:第一机器人引导机械抓手抓取打磨完的导向臂移至下料架顺序摆放,放下导向臂后第一机器人返回上料架;
85.s6:循环重复以上步骤。
86.实施例二(基于两台打磨台)
87.为了进一步的提打磨效率,本方案特地将打磨台设置两台,即打磨台包括第一打磨台和第二打磨台,两台所述打磨台对称分布在所述第一机器人和第二机器人之间,基于两台打磨台,具体打磨包括如下步骤:
88.s1:第一机器人移动至上料架上方,视觉检测装置对导向臂进行一次扫描,确定导向臂位置,引导第一机器人上的机械抓手抓取导向臂至第一打磨台;
89.s2:导向臂在第一打磨台上,一端支承在支承块上,另一端支承在第二夹紧装置的夹具座上,机械抓手松开导向臂后,第一夹紧装置和第二夹紧装置分别从宽度方向和厚度方向对导向臂进行夹紧;
90.s3:第一机器人移至被夹紧的导向臂位上方,视觉检测装置对导向臂做二次扫描,获取打磨部位的详细几何特征,上传到上位机系统,生成打磨路径并传给第二机器人,第一机器人完成扫描后从第一打磨台返回上料架;
91.s4:第一机器人返回上料架后,重复s1的抓取将另一导向臂抓取至第二打磨台,继续重复s2、s3,完成扫描后返回原位等待,在第一机器人返回上料架的同时,第二机器人移至第一打磨台,按照规划的打磨路径带动打磨头依次进行粗磨、更换细打磨头、细磨工作,完成细磨后第二机器人移至磨具架更换粗打磨头;
92.s5:完成步骤s4后,第一打磨台发出第一夹紧装置和第二夹紧装置松开导向臂信号,第一机器人抓取第一打磨台上打磨完的导向臂移至下料架顺序摆放,放下导向臂后第一机器人返回上料架;
93.s6:完成步骤s4后,第二机器人再移至第二打磨台,按照规划的路径带动打磨头依次进行粗磨、更换细打磨头、细磨工作,完成细磨后第二机器人移至磨具架更换粗打磨头,返回原位等待第一打磨台的控制信号;
94.s7:第二打磨台发出第一夹紧装置和第二夹紧装置松开导向臂信号,第一机器人抓取第二打磨台上打磨完的导向臂移至下料架顺序摆放,放下导向臂后第一机器人返回上料架;
95.s8:依次重复循环以上步骤。
96.通过采用本技术方案,利用第一夹紧装置和第二夹紧装置实现对导向臂上下左右的同步夹紧,为打磨质量的提升提供了极大地促进作用;同时利用机器人及视觉系统,自动规划打磨路径,利用恒力控制磨头控制打磨参数,也提高了打磨质量;第一机器人负责上下料和扫描检测、第二机器人负责打磨、相互配合打磨的设计,使打磨效率大大提高,自动打磨生产率是人工打磨的3倍;并且通过自动化连线,降低了劳动强度,改善了作业环境,具有良好的综合经济效益,便于推广。
97.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。