1.本技术属于仓储技术领域,尤其涉及一种仓储机器人的同步装置。
背景技术:
2.仓储,一般是指具有储存设施,对货物进行集中、整理、保管和分发等工作的场所。目前现有的货物一般存放在仓库中,而仓库中的货栈都比较高,普通吊具使用钢丝绳将货物从低层吊取到高层货栈时,由于货物的自重,在吊取过程中会带来运动的不稳定性,也比较容易左右摆动、发生磕碰等,为此我们提供了一种仓储机器人的同步装置。
技术实现要素:
3.针对上述现有技术的缺点或不足,本技术提供了一种仓储机器人的同步装置,其通过驱动电机连接减速机构,带动两侧的锥齿轮,再由锥齿轮分别连接并带动两个提升轴同时沿相反方向转动,从而实现卷轴体内的钢带同步并减速运动,有效地解决了吊取货箱带来的不稳定性。
4.为解决上述技术问题,本技术通过以下技术方案来实现:
5.一种仓储机器人的同步装置,包括:固定板、驱动电机、减速机构、连杆及同步机构;所述驱动电机安装在固定板上;所述驱动电机与减速机构可相对转动连接;所述减速机构与同步机构可相对转动连接。
6.进一步地,所述减速机构包括:第一减速器、第二减速器及第三减速器;其中,所述驱动电机与第二减速器连接,所述连杆可贯穿地连接第二减速器;所述第一减速器和第三减速器分别连接于连杆的两端。
7.进一步地,所述第一减速器、第二减速器及第三减速器均具有内部空心结构。
8.进一步地,所述同步机构包括:第一小锥齿轮、第二小锥齿轮、第三大锥齿轮及第四大锥齿轮;其中,所述第一小锥齿轮和所述第二小锥齿轮分别连接所述连杆的两端;所述第一小锥齿轮和所述第二小锥齿轮分别与所述第三大锥齿轮及所述第四大锥齿轮滚动啮合。
9.进一步地,所述第一小锥齿轮与所述第三大锥齿轮为轴交角呈90度的圆锥齿轮;所述第二小锥齿轮与所述第四大锥齿轮均为轴交角呈90度的圆锥齿轮。
10.进一步地,所述第一小锥齿轮与所述第三大锥齿轮的啮合传动比等于所述第二小锥齿轮与所述第四大锥齿轮的啮合传动比。
11.进一步地,还包括:提升机构,与所述同步机构可相对转动连接。
12.进一步地,所述提升机构包括:第一提升轴和第二提升轴;所述第一提升轴和所述第二提升轴分别连接所述同步机构的第三大锥齿轮和第四大锥齿轮。
13.进一步地,所述第一提升轴上靠近所述第三大锥齿轮的一端设有第一卷轴体;所述第二提升轴上靠近所述第四大锥齿轮的一端设有第二卷轴体。
14.进一步地,所述第一卷轴体和所述第二卷轴体内设有钢带;所述第一卷轴体和所
述第二卷轴体均为绝缘体。
15.与现有技术相比,本技术具有如下技术效果:
16.(1)本技术中,通过驱动电机带动减速机构,再由减速机构通过连杆带动同步机构转动,可以实现整个转置运转速度的控制,又实现提升轴同步反向转动,从而带动钢带提升货物时更加稳定和牢固,保证了装置运转的同步和顺畅。
17.(2)本技术中,驱动电机通过第二减速器将动力直接输出到连杆上,带动连杆匀速转动;所述第一减速器和第三减速器,与所述第二减速器的传动规格和属性完全相同,通过在同一连杆上设置所述所述第一减速器、第二减速器和第三减速器,以最大程度确保所述第一减速器和第三减速器分别向外输出的动力匀速且相同,从而实现两根提升轴获得的动力具有减速性和同步性。
18.(3)本技术中,通过设置所述第一小锥齿轮、第二小锥齿轮、第三大锥齿轮及第四大锥齿轮,从而实现传动系统更加同步和稳定。
19.(4)本技术中,通过第三大锥齿轮和第四大锥齿轮的啮合传动,将动力传递到与所述第三大锥齿轮和第四大锥齿轮相连接的提升轴上,使得两组提升轴平稳匀速且同步运行。
附图说明
20.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
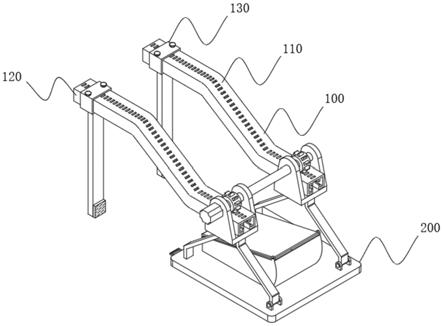
21.图1是本技术一实施例的的结构示意图;
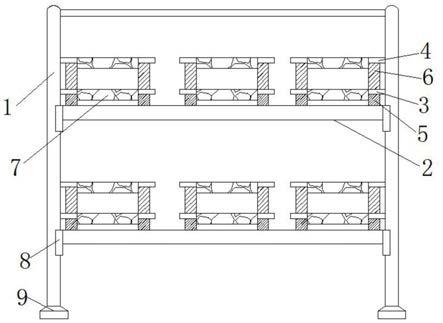
22.图2是图1的前视图;
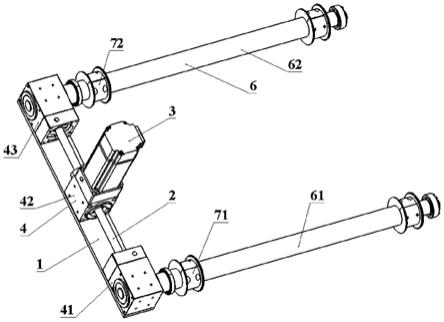
23.图3是本技术一实施例的锥齿轮的结构示意图;
24.图4是本技术一实施例的锥齿轮的局部放大图;
25.图5是本技术一实施例的钢带的结构示意图。
26.图中:1—固定板,2—连杆,3—驱动电机,4—减速机构,41—第一减速器,42—第二减速器,43—第三减速器,5—同步机构,51—第一小锥齿轮,52—第二小锥齿轮,53—第三大锥齿轮,54—第三大锥齿轮,6—提升机构,61—第一提升轴,62—第二提升轴,71—第一卷轴体,72—第二卷轴体,8—钢带。
具体实施方式
27.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.如图1至图5所示,在本技术的其中一个实施例中,一种仓储机器人的同步装置,包括:固定板1、驱动电机3、减速机构4、连杆2及同步机构5;所述驱动电机3安装在固定板1上;所述驱动电机3与减速机构4可相对转动连接;所述减速机构4与同步机构5可相对转动连接。
29.本实施例通过驱动电机3带动减速机构4,再由减速机构4通过连杆2带动同步机构
5转动,可以实现整个转置运转速度的控制,又实现提升轴同步反向转动,从而带动钢带8提升货物时更加稳定和牢固,保证了装置运转的同步和顺畅。
30.进一步地,所述减速机构4包括:第一减速器41、第一减速器42及第一减速器43;其中,所述驱动电机3与第一减速器42连接,所述连杆2可贯穿地连接第一减速器42,所述第一减速器41和第一减速器43分别连接于连杆2的两端。
31.在本实施例中,驱动电机3通过第一减速器42将动力直接输出到连杆2上,带动连杆2匀速转动;所述第一减速器41和第一减速器43,与所述第一减速器42的传动规格和属性完全相同,通过在同一连杆2上设置所述所述第一减速器41、第一减速器42和第一减速器43,以最大程度确保所述第一减速器41和第一减速器43分别向外输出的动力匀速且相同,从而实现两根提升轴获得的动力具有减速性和同步性。
32.进一步地,所述同步机构5包括:第一小锥齿轮51、第二小锥齿轮52、第三大锥齿轮53及第四大锥齿轮54;其中,所述第一小锥齿轮51和所述第二小锥齿轮52分别连接所述连杆2的两端;所述第一小锥齿轮51和所述第二小锥齿轮52分别与所述第三大锥齿轮53及所述第四大锥齿轮54滚动啮合。由于锥齿轮传动特点是降低了轮齿小端的齿顶高,从而减小了齿顶过尖的可能性;且齿根圆角半径较大,有利于提高轮齿的承载能力、刀具寿命和储油润滑,一般的应用场合是轻载和低速场合,因此通过设置所述第一小锥齿轮51、第二小锥齿轮52、第三大锥齿轮53及第四大锥齿轮54,从而实现传动系统更加同步和稳定。
33.进一步地,所述第一减速器41、第一减速器42及第一减速器43均具有内部空心结构。以便连杆2贯穿进三个减速器中,从而实现同轴传动。
34.进一步地,所述第一小锥齿轮51与所述第三大锥齿轮53为轴交角呈90度的圆锥齿轮;所述第二小锥齿轮52与所述第四大锥齿轮54均为轴交角呈90度的圆锥齿轮。
35.进一步地,所述第一小锥齿轮51与所述第三大锥齿轮53的啮合传动比等于所述第二小锥齿轮52与所述第四大锥齿轮54的啮合传动比。通过设置两组锥齿轮相同的啮合传动比,从而实现两组传动的一致性。
36.进一步地,还包括:提升机构6,与所述同步机构5可相对转动连接。
37.优选地,所述提升机构6包括:第一提升轴61和第二提升轴62;所述第一提升轴61和所述第二提升轴62分别连接所述同步机构5的第三大锥齿轮53和第四大锥齿轮54。
38.在本实施例中,通过第三大锥齿轮53和第四大锥齿轮54的啮合传动,将动力传递到与所述第三大锥齿轮53和第四大锥齿轮54相连接的提升轴上,使得两组提升轴平稳匀速且同步运行。
39.进一步地,所述第一提升轴61上靠近所述第三大锥齿轮53的一端设有第一卷轴体71;所述第二提升轴62上靠近所述第四大锥齿轮54的一端设有第二卷轴体72。
40.进一步地,所述第一卷轴体71和所述第二卷轴体72内设有钢带8;所述第一卷轴体71和所述第二卷轴体72均为绝缘体。
41.如图2所述,在本技术的其中一个实施例中,所述第一卷轴体71和所述第二卷轴体72内分别装有卷缩其内部的可拉出的钢带8,钢带8的拉出开口方向均位于所述第一卷轴体71和所述第二卷轴体72的外侧,因此两组提升轴同步运动的方向是反向的,钢带8用于连接到货箱上,从而实现提升起货箱。
42.本技术中,通过驱动电机带动减速机构,再由减速机构通过连杆带动同步机构转
动,可以实现整个转置运转速度的控制,又实现提升轴同步反向转动,从而带动钢带提升货物时更加稳定和牢固,保证了装置运转的同步和顺畅。
43.本技术中,驱动电机通过第一减速器将动力直接输出到连杆上,带动连杆匀速转动;所述第一减速器和第一减速器,与所述第一减速器的传动规格和属性完全相同,通过在同一连杆上设置所述所述第一减速器、第一减速器和第一减速器,以最大程度确保所述第一减速器和第一减速器分别向外输出的动力匀速且相同,从而实现两根提升轴获得的动力具有减速性和同步性。
44.本技术中,通过设置所述第一小锥齿轮、第二小锥齿轮、第三大锥齿轮及第四大锥齿轮,从而实现传动系统更加同步和稳定。
45.本技术中,通过第三大锥齿轮和第四大锥齿轮的啮合传动,将动力传递到与所述第三大锥齿轮和第四大锥齿轮相连接的提升轴上,使得两组提升轴平稳匀速且同步运行。
46.以上实施例仅用以说明本技术的技术方案而非限定,参照较佳实施例对本技术进行了详细说明。本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和范围,均应涵盖在本技术的权利要求范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。