1.本实用新型涉及机械加工制造领域,尤其是涉及一种工业机器人自动化喷砂及回收装置。
背景技术:
2.目前,工业机器人已广泛应用于各行各业,随着中国传统产业升级的逐步深入和劳动者对劳动环境要求的进一步提高,机器人越来越发挥其在喷涂行业生产过程中的显着作用。
3.喷砂是通过喷枪借助于空气压力,将高速的砂粒喷射到需要处理的工件表面,去除工件外表面的氧化皮、油污等残留物,提高工件的光洁度及抗疲劳性,使工件外表更美观,好看,表面的机械性能得到改善。
4.在现有的喷砂作业生产上,大体上主要经由工作人员将待喷砂工件放置于喷砂工位上,工作人员再通过手持喷砂枪进行人工喷砂处理,效率低下,喷砂过程中漂浮于空气的砂粒一经人体吸入,容易对身体产生危害,同时,喷砂过程中漂浮的砂粒粉尘难以有效回收,造成资源浪费。
技术实现要素:
5.本实用新型的目的是针对上述问题,提供一种操作简单、经由工业机器人代替人工进行喷砂、提高喷砂效率、充分回收喷砂粉尘的工业机器人自动化喷砂及回收装置。
6.本实用新型的目的是这样实现的:包括工件上下料及输送机构、喷砂机构、供砂及回收机构、除尘机构和上位机;工件上下料及输送机构包括输送转台、工件工装、激光定位组件、伺服电机和减速器,输送转台设置于喷砂室的内部,喷砂室通过固定于喷砂室内部的分隔板分隔为上下料区及喷砂区,工件工装呈环形列阵布设于输送转台上,激光定位组件设置于喷砂室的内部并控制每个工件的定位,输送转台通过伺服电机的驱动及减速器的传动而控制工件工装的转动;喷砂机构包括六轴工业机器人及与六轴工业机器人连接的喷枪,六轴工业机器人外包裹防护服而设置于喷砂室内部的机架上,由喷枪对喷砂区的工件进行喷砂处理;供砂及回收机构包括旋风分离器、送砂管道和回砂管道,喷砂砂粒经由旋风分离器的下方接出的送砂管道连接喷枪喷射而出,机架下方设置的漏斗对喷砂期间的多余砂粒回收经回砂管道进入旋风分离器的上方;除尘机构通过吸尘管道对旋风分离器的排风除尘;上位机通过控制软件的操作界面对六轴工业机器人控制动作。
7.本实用新型,工件工装设置定位销钉、定位导条和工件锁紧机构,工件架设在定位导条上通过工件锁紧机构锁紧并通过定位销钉固定定位在工件工装上。
8.本实用新型,喷枪连接送砂管道的接口为进砂口,喷枪的进砂口同侧设置有入气口,喷枪的另一侧为出砂口。
9.本实用新型,在喷砂室的前侧设置观察门,在喷砂室的上下料侧设置开关门。
10.本实用新型,在除尘机构设置有滤芯除尘器,除尘机构设置有检修梯。
11.本实用新型,具有以下有益效果:
12.1)、使用工业机器人代替人工进行喷砂作业,通过伺服电机对机器人喷砂路径的精准定位控制,可以确保每个工件喷砂效果一致,砂层厚薄均匀,大大增加产品的合格率,同时,使用工业机器人代替人工进行喷砂作业,避免工作人员长期接触喷砂粉尘,大大降低了对人体的危害;
13.2)、通过安装在输送转台上面的工装组件,工作人员可以提前将待喷砂工件放置于工装组件处,并使用激光定位组件进行定位,确保每一块待喷砂工件位置一致,保证喷砂效果。同时,通过分隔板隔开上下料区及喷砂区,工作人员在上料的同时,可以通过上位机软件控制进行已上料工件的喷砂工作,节省人工的同时大大增加了喷砂效率;
14.3)、使用六轴工业机器人进行喷砂作业,相比较现有喷砂机,喷砂范围更大,姿态更加灵活,能够实现工件多角度喷砂的作业要求,喷砂厚度均匀,不需要再进行二次喷砂,提高了经济效益。
15.下面实施例结合附图说明对本实用新型作进一步的说明。
附图说明
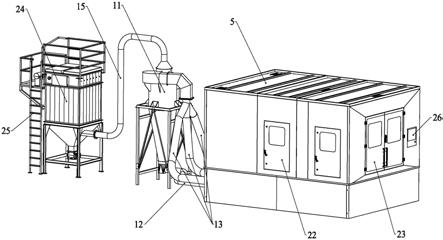
16.图1是本实用新型的一个实施例的立体结构示意图;
17.图2是图1实施例的工件上下料及输送机构和喷砂机构的主体结构示意图;
18.图3是图1实施例的输送机构的主体结构示意图;
19.图4是图1实施例的送转台的立体结构示意图;
20.图5是图1实施例的工件工装的立体结构示意图;
21.图6是图1实施例的喷枪的立体结构示意图。
22.图中,1、输送转台;2、工件工装;3、伺服电机;4、减速器;5、喷砂室;6、分隔板;7、工件;8、六轴工业机器人;9、喷枪;10、机架;11、旋风分离器;12、送砂管道;13、回砂管道;14、漏斗;15、吸尘管道;16、销钉;17、定位导条;18、工件锁紧机构;19、进砂口;20、入气口;21、出砂口;22、观察门;23、开关门;24、滤芯除尘器;25、检修梯;26、上位机。
具体实施方式
23.参照图1至图6,本实施例是一种工业机器人自动化喷砂及回收装置,包括工件上下料及输送机构、喷砂机构、供砂及回收机构、除尘机构和上位机;工件上下料及输送机构包括输送转台1、工件工装2、激光定位组件、伺服电机3和减速器4,输送转台设置于喷砂室5的内部,喷砂室通过固定于喷砂室内部的分隔板6分隔为上下料区及喷砂区,分隔板中间设置有一透明pvc板,用于人工观察喷砂工作过程,工件工装呈环形列阵布设于输送转台上,激光定位组件设置于喷砂室的内部并控制六个工件7的定位,输送转台通过伺服电机的驱动及减速器的传动而控制工件工装的转动;喷砂机构包括六轴工业机器人8及与六轴工业机器人连接的喷枪9,六轴工业机器人外包裹防护服而设置于喷砂室内部的机架10上,由喷枪对喷砂区的工件进行喷砂处理;供砂及回收机构包括旋风分离器11、送砂管道12和回砂管道13,喷砂砂粒经由旋风分离器的下方接出的送砂管道连接喷枪喷射而出,机架下方设置的漏斗14对喷砂期间的多余砂粒回收经回砂管道进入旋风分离器的上方;除尘机构通过吸尘管道15对旋风分离器的排风除尘;上位机26通过控制软件的操作界面对六轴工业机器
人控制动作;工件工装设置定位销钉16、定位导条17和工件锁紧机构18,工件架设在定位导条上通过工件锁紧机构锁紧并通过定位销钉固定定位在工件工装上,定位导条适应工件的长度、高度而自由调整,与工件锁紧机构配合,通过对工件进行压紧,通过调整锁紧机构在槽孔的前后位置,可适应不同大小工件的锁紧要求;喷枪连接送砂管道的接口为进砂口19,喷枪的进砂口同侧设置有入气口20,喷枪的另一侧为出砂口21;在喷砂室的前侧设置观察门22,在喷砂室的上下料侧设置开关门23;在除尘机构设置有滤芯除尘器24,除尘机构设置有检修梯25。
24.本实施例,上位机及上位机系统包括15寸一体机电脑及上位机控制软件,在喷砂室侧面钣金开有一方形槽,一体机电脑嵌套于钣金内进行固定,并与六轴工业机器人系统plc通过tcp/ip方式进行通信,上位机控制软件安装于一体机电脑内,通过上位机控制软件操作界面进行机器人程序的调用,控制六轴工业机器人运行程序进行喷砂、停止,急停、加减速,生产状态显示功能。
25.本实用新型的工作过程如下:待喷砂工件经由操作人员在上下料区进行工件上料,通过工件工装进行固定锁紧,由上位机及上位机系统进行待喷砂工件型号的确认,确认完成后经由工件上下料及输送机构将待喷砂工件输送入喷砂区;待输送到位后,工业机器人的控制系统自动识别工件型号,并自动运行对应程序,存储于旋风分离器的砂粒经由送砂管道通过喷砂枪喷出,通过六轴工业机器人控制喷砂枪喷砂,将砂粒均匀的喷射在工件上;待工件喷砂完成后,经由工件上下料及输送机构将喷砂完成后的工件输送至上下料区处;在输送过程中,自动吹气清洁装置将对工件表面残留砂粒、粉尘和杂质进行吹净处理,完成整个工件的自动化喷砂过程;喷砂过程中,喷砂室内多余的砂粒在回收装置除尘机吸力作用下自动落入喷砂机架的漏斗内,通过送砂管道及回收管道、旋风分离器进行回收利用,通过滤芯除尘器进行砂粒中粉尘的除尘,避免多余的杂质混入砂粒,造成工件喷砂不良,提高工件喷砂的合格率。
26.另外,在本实施例中,共设置有六个工件工装及二个出砂口,根据实际喷砂工艺需求及工件的尺寸大小,工件工装及出砂口的数量可以根据实际需要进行增加或减少,以达到更好的喷砂效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。