1.本发明涉及一种机械手领域,尤其涉及一种应用于精雕机中的抓取机械手。
背景技术:
2.众所周知,精雕机是数控机床的一种,由于它具有运行稳定可靠、加工质量好、效率高、操作简单及维护方便等优点,使得它能应用对电子产品的屏幕或背壳上的玻璃进行加工。
3.其中,在精雕机中,离不开机械手的使用,以借助机械手来实现玻璃基板的自动上下料的目的。
4.但是,在中国专利申请号201911070321.8所公开的精雕机的自动取放料机构中,由于它采用中置的结构,再结合上料工作跨度大,使得现有精雕机的自动取放料机构两端晃动大、稳定性不好、占用空间大及密封设计要求高。
5.因此,急需要一种大跨度、刚性强且占用空间小的抓取机械手来克服上述的缺陷。
技术实现要素:
6.本发明的目的在于提供一种大跨度、刚性强且占用空间小的抓取机械手。
7.为实现上述目的,本发明的抓取机械手包括座体、沿y轴方向滑设于所述座体的第一水平滑移立架、沿y轴方向滑设于所述座体的第二水平滑移立架、沿z轴方向滑设于所述第一水平滑移立架的第一上下滑座、沿z轴方向滑设于所述第二水平滑移立架的第二上下滑座、装配于所述第一上下滑座并用于驱使所述第一上下滑座滑移的第一上下驱动器、装配于所述第二上下滑座并用于驱使所述第二上下滑座滑移的第二上下驱动器、装配于所述座体并用于驱使所述第一水平滑移立架和第二水平滑移立架同步滑移的水平驱动器、悬置于所述座体上方的转臂、装配于所述第一上下滑座的旋转驱动器及安装于所述转臂且呈相对布置的第一抓取组件和第二抓取组件。所述第一水平滑移立架沿x轴方向呈间隔开的并排布置,所述转臂沿所述x轴方向延伸且第一端与所述旋转驱动器的输出端连接,所述转臂的第二端装配于所述第二上下滑座。
8.较佳地,本发明的抓取机械手还包括装配于所述第二上下滑座的滑移伸缩支撑机构,所述转臂的第二端装配于所述滑移伸缩支撑机构,所述滑移伸缩支撑机构与所述转臂的第二端之间还可沿所述x轴方向彼此相对滑移。
9.较佳地,所述滑移伸缩支撑机构包含接合座、轴承、法兰座、第一螺丝、第二螺丝及直线伸缩驱动器,所述直线伸缩驱动器安装于所述第二上下滑座,所述直线伸缩驱动器的输出端沿所述x轴方向布置,所述法兰座沿所述x轴方向位于所述第一上下滑座和第二上下滑座之间,所述法兰座的第一侧与所述直线伸缩驱动器的输出端固定连接,所述法兰座的第二侧朝远离所述第二上下滑座的方向延伸出一阶梯轴,所述轴承通过其内圈套装于所述阶梯轴,所述接合座套装于所述轴承的外圈,所述接合座远离所述法兰座的一侧开设有轴向导引防转槽,所述转臂的第二端呈匹配地装配于所述轴向导引防转槽中且可相对地沿x
轴方向于所述轴向导引防转槽中滑移,所述第一螺丝沿x轴的反向从所述接合座邻近所述法兰座的一侧穿入所述接合座并与所述轴承的外圈抵挡,所述第二螺丝沿x轴的正向从所述轴向导引防转槽穿入所述阶梯轴并与所述轴承的内圈抵挡。
10.较佳地,所述滑移伸缩支撑机构还包含呈匹配的置于所述轴向导引防转槽中的防转导滑块、设于所述防转导滑块和所述阶梯轴之间的弹簧及套装于所述法兰座、接合座和第二上下滑座三者上的密封套,所述防转导滑块在所述弹簧的作用下与所述转臂之第二端抵接。
11.较佳地,所述阶梯轴开设有用于供所述弹簧套装的套装腔。
12.较佳地,所述法兰座和直线伸缩驱动器两者在所述第二上下滑座上呈相对的异侧布置。
13.较佳地,本发明的抓取机械手还包括装配于所述座体并分别与所述第一水平滑移立架和第二水平滑移立架连接的同步传动机构,所述水平驱动器通过所述同步传动机构驱使所述第一水平滑移立架和第二水平滑移立架做同步的滑移。
14.较佳地,所述同步传动机构包含第一转轮、第二转轮、绕设传动件及中间同步轴,所述座体为两个且沿所述x轴方向彼此间隔并排布置,所述第一转轮和第二转轮各装配于每个所述座体上,同一所述座体上的第一转轮和第二转轮还沿所述y轴方向呈隔开的对齐布置,同一所述座体上的第一转轮和第二转轮套装有所述绕设传动件,所述中间同步轴的一端与一个所述座体上的第一转轮固定连接,所述中间同步轴的另一端与另一个所述座体上的第一转轮固定连接,所述水平驱动器驱使一个所述座体上的第一转轮转动,所述第一水平滑移立架与一个所述座体上的绕设传动件固定连接,所述第二水平滑移立架与另一个所述座体上的绕设传动件固定连接。
15.较佳地,所述第一水平滑移立架安装有沿所述y轴方向布置并与所述第一上下滑座连接的第一带传动组件,所述第一上下驱动器通过所述第一带传动组件驱使所述第一上下滑座滑移;所述第二水平滑移立架安装有沿所述y轴方向布置并与所述第二上下滑座连接的第二带传动组件,所述第二上下驱动器通过所述第二带传动组件驱使所述第二上下滑座滑移。
16.较佳地,所述第一抓取组件和第二抓组件各为真空吸附结构。
17.与现有技术相比,由于转臂的第一端受到装配于第一上下滑座的旋转驱动器的输出端支撑,以及转臂的第二端受到第二上下滑座的支撑,同时,第一水平滑移立架和第二水平滑移立架被水平驱动器驱使做同步的滑移,因此,使得本发明的抓取机械手具有实现跨度大、刚性强且占用空间小的优点。
附图说明
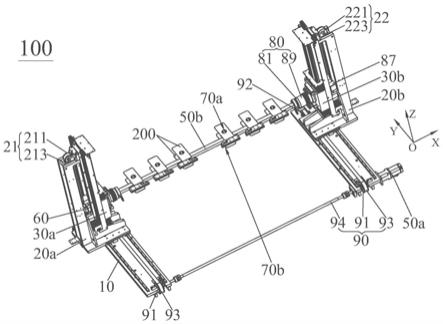
18.图1是本发明的抓取机械手的立体结构示意图。
19.图2是图1所示的抓取机械手沿y轴正向投影的平面结构示意图。
20.图3是本发明的抓取机械手中的座体、水平驱动器、同步传动机构、部分的第一水平滑移立架及部分的第二水平滑移立架组装在一起时的立体结构示意图。
21.图4是本发明的抓取机械手中的转臂及转臂上的第一抓取组件和第二抓取组件的立体结构示意图。
22.图5是本发明的抓取机械手中的第二上下滑座及第二上下滑座上的滑移伸缩支撑机构的立体结构示意图。
23.图6是图5所示的立体分解结构示意图。
24.图7是图5所示被过其中心线的平面剖切后的内部结构示意图。
具体实施方式
25.为了详细说明本发明的技术内容、构造特征,以下结合实施方式并配合附图作进一步说明。
26.请参阅图1及图2,本发明的抓取机械手100包括座体10、沿y轴方向滑设于座体10的第一水平滑移立架20a、沿y轴方向滑设于座体10的第二水平滑移立架20a、沿z轴方向滑设于第一水平滑移立架20a的第一上下滑座30a、沿z轴方向滑设于第二水平滑移立架20b的第二上下滑座30b、装配于第一上下滑座30a并用于驱使第一上下滑座30a滑移的第一上下驱动器40a、装配于第二上下滑座30b并用于驱使第二上下滑座30b滑移的第二上下驱动器40b、装配于座体10并用于驱使第一水平滑移立架20a和第二水平滑移立架20b同步滑移的水平驱动器50a、悬置于座体10上方的转臂50b、装配于第一上下滑座30a的旋转驱动器60及安装于转臂50且呈相对布置的第一抓取组件70a和第二抓取组件70b。第一水平滑移立架20a沿x轴方向与第二水平滑移立架20b呈隔开的并排布置,转臂50b沿x轴方向延伸,转臂50b的第一端与旋转驱动器60的输出端连接,以使得转臂50b的第一端与旋转驱动器60的输出端装配在一起,从而由旋转驱动器60驱使转臂50b旋转,转臂50b的第二端装配于第二上下滑座30b,由第二上下滑座30b对转臂50b的第二端提供支撑,从而使得沿x轴方向做大跨度布置的转臂50b之两端受到支撑而刚性强。需要说明的是,前述的相对布置是指两者方向正好相反,例如,在图1、图2及图4中,第一抓取组件70a朝上布置而第二抓取组件70b朝下布置,较优的是,第一抓取组件70a和第二抓组件70b各为真空吸附结构,以真空吸附的方式对工件例如玻璃片200进行吸放操作,提高吸放操作的便利性,但不以附图所示为限。更具体地,如下:
27.如图1和图2所示,本发明的抓取机械手100还包括装配于第二上下滑座30b的滑移伸缩支撑机构80,转臂50b的第二端装配于滑移伸缩支撑机构80,滑移伸缩支撑机构80与转臂50b的第二端之间还可沿x轴方向彼此相对滑移,以使得滑移伸缩支撑机构80除对转臂50b的第二端提供支撑作用外,还能相对转臂50b的第二端滑移伸缩,故在上料换料时可以平移一段距离,给校正留出一定的校正空间,同时,增加了本发明的抓取机械手100的一个自由度,使得本发明的抓取机械手100的操作便利性更好。具体地,在图5至图7中,滑移伸缩支撑机构80包含接合座81、轴承82、法兰座83、第一螺丝84、第二螺丝85及直线伸缩驱动器86;直线伸缩驱动器86安装于第二上下滑座30b,由第二上下滑座30b为直线伸缩驱动器86提供安装的场所,并使得直线伸缩驱动器86跟随第二上下滑座30b一起滑移,直线伸缩驱动器86的输出端861沿x轴方向布置,以使得直线伸缩驱动器86沿x轴方向做直线的伸缩滑移;法兰座83沿x轴方向位于第一上下滑座30a和第二上下滑座30b之间,法兰座83的第一侧与直线伸缩驱动器86的输出端861固定连接,由直线伸缩驱动器86驱使法兰座83沿x轴方向做直线的伸缩滑移,法兰座83的第二侧朝远离第二上下滑座30b的方向延伸出一阶梯轴831;轴承82通过其内圈821套装于阶梯轴831,由阶梯轴831对轴承82提供支撑;接合座81套装于
轴承82的外圈822,以使得接合座81通过轴承82可转动地装配于阶梯轴831上,从而使得接合座81相对阶梯轴831的旋转更灵敏和更顺畅,接合座81远离法兰座83的一侧开设有轴向导引防转槽811;转臂50b的第二端呈匹配地装配于轴向导引防转槽811中且可相对地沿x轴方向于轴向导引防转槽811中滑移;第一螺丝84沿x轴的反向从接合座81邻近法兰座83的一侧穿入接合座81并与轴承82的外圈822抵挡,第二螺丝85沿x轴的正向从轴向导引防转槽811穿入阶梯轴831并与轴承82的内圈821抵挡,以借助第一螺丝84和第二螺丝85的配合而将轴承82固定,再借助轴承82而使接合座81沿x轴方向与法兰座83连接在一起,从而使得接合座81除能跟随法兰座83沿x轴方向滑移外,接合座81还能相对法兰座83转动,以满足转臂50b的第二端与接合座81同步转动的要求。更具体地,在图6和图7中,滑移伸缩支撑机构80还包含呈匹配的置于轴向导引防转槽811中的防转导滑块88、设于防转导滑块88和阶梯轴831之间的弹簧86及套装于法兰座83、接合座81和第二上下滑座30b三者上的密封套89,以借助密封套89在满足旋转和伸缩的前提下有效地保护了密封套89内的部件,从而保证了本发明的抓取机械手100的稳定性;防转导滑块88在弹簧86的作用下与转臂50b之第二端抵接;故在法兰座83、轴承82和接合座81三者一起被直线伸缩驱动器86带动沿x轴的正向做远离转臂50b之第二端的滑移过程中,借助弹簧86的伸缩变形而使得防转导滑块88与转臂50b的第二端一直保持抵接状态,从而确保转臂50b的第二端在滑移伸缩支撑机构80的伸缩过程中得到可靠的支撑。
28.其中,为确保弹簧87装配的可靠性,阶梯轴831开设有用于供弹簧87套装的套装腔8311(见图7);为使得法兰座83和直线伸缩驱动器85于第二上下滑座30b上的布局更合理,法兰座83和直线伸缩驱动器86两者在第二上下滑座30b上呈相对的异侧布置,例如,在图6中,法兰座83位于第二上下滑座30b的左侧而直线伸缩驱动器86位于第二上下滑座30b的右侧,举例而言,直线伸缩驱动器86为气缸,当然也可以选择为油缸或其它直线伸缩驱动器,故不以附图所示为限。
29.如图1至图3所示,本发明的抓取机械手100还包括装配于座体10并分别与第一水平滑移立架20a和第二水平滑移立架20b连接的同步传动机构90,水平驱动器50a通过同步传动机构90驱使第一水平滑移立架20a和第二水平滑移立架20b做同步的滑移。具体地,在图1至图3中,同步传动机构90包含第一转轮91、第二转轮92、绕设传动件93及中间同步轴94;座体10为两个且沿x轴方向彼此间隔并排布置,第一转轮91和第二转轮92各装配于每个座体10上,即每个座体10上各安装有第一转轮91和第二转轮92,同一座体10上的第一转轮91和第二转轮92还沿y轴方向呈隔开的对齐布置,同一座体10上的第一转轮91和第二转轮92套装有绕设传动件93;中间同步轴94的一端与一个座体10上的第一转轮91固定连接,中间同步轴94的另一端与另一个座体10上的第一转轮91固定连接;水平驱动器50a驱使一个座体10上的第一转轮91转动,以借助中间同步转94来确保两个座体10上的第一转轮91一起做同步转动;第一水平滑移立架20a与一个座体10上的绕设传动件93固定连接,第二水平滑移立架20b与另一个座体10上的绕设传动件93固定连接;以实现由同一个水平驱动器50a驱使第一水平滑移立架20a和第二水平滑移立架20b做同步滑移的目的,故性价比更好。举例而言,在图3中,第一转轮91和第二转轮92为带轮,对应地,绕设传动件93为皮带,而水平驱动器50a为电机;当然,根据实际需要,第一转轮91和第二转轮92可为链轮,对应地,绕设传动件93为链条,故不以附图所示为限。值得注意者,虽然在图1和图3中前方那个轮被作为第
一转轮91,后方那个轮作为第二转轮92,但是,根据实际需要而可将后方那个轮作为第一转轮91,将前方的那个轮作为第二转轮92。
30.如图1和图2所示,第一水平滑移立架20a安装有沿y轴方向布置并与第一上下滑座30a连接的第一带传动组件21,第一上下驱动器40a通过第一带传动组件21驱使第一上下滑座30a滑移,以使得第一上下驱动器40a借助第一带传动组件21能更平稳顺畅地驱使第一上下滑座30a做上下滑移;第二水平滑移立架20b安装有沿y轴方向布置并与第二上下滑座30b连接的第二带传动组件22,第二上下驱动器40b通过第二带传动组件22驱使第二上下滑座30b滑移,以使得第二上下驱动器40b借助第二带传动组件22能更平稳顺畅地驱使第二上下滑座30b做上下滑移。举例而言,第一带传动组件21包含安装于第一水平滑移立架20a的上带轮211、安装于第一水平滑移立架20a的下带轮212及套设于上带轮211和下带轮212的传动带213,第一上下滑座30a与传动带213固定连接,第一上下驱动器40a为电机并驱使下带轮212转动;同理,第二带传动组件22也包含安装于第二水平滑移立架20b的上带轮221、安装于第二水平滑移立架20b的下带轮222及套设于上带轮221和下带轮222的传动带223,第二上下滑座30b与传动带223固定连接,第二上下驱动器40b为电机并驱使下带轮222转动,故不以此为限。需要说明的是,根据实际需要,第一上下驱动器40a可做成驱使上带轮211转动,同理,第二上下驱动器40b可做成驱使上带轮221转动。
31.与现有技术相比,由于转臂50b的第一端受到装配于第一上下滑座30a的旋转驱动器60的输出端支撑,以及转臂50b的第二端受到第二上下滑座30b的支撑,同时,第一水平滑移立架20a和第二水平滑移立架20b被水平驱动器50a驱使做同步的滑移,因此,使得本发明的抓取机械手100具有实现跨度大、刚性强且占用空间小的优点。
32.需要说明的是,x轴方向、y轴方向及z轴方向是以附图所示为准;另,根据实际需要可将滑移伸缩支撑机构80删除;此外,前述的轴向导引防转槽811和防转导滑块88是一种允许轴向滑移并阻挡旋转的结构,例如它们的轮廓是图6所示的由方形轮廓及接合在方形轮廓之每边上的半圆轮廓构成的组合轮廓,当然,也可以为凸多边形轮廓等,故不以此为限。
33.以上所揭露的仅为本发明的较佳实例而已,不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,均属于本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。