1.本发明涉及车辆及其控制装置。
背景技术:
2.对车辆的周围的状况进行监视并进行用于躲避与其他车辆、人的碰撞的动作的功能已经被实用化。在专利文献1中记载了在车辆驻车时执行该功能。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2015
‑
081022号公报
技术实现要素:
6.发明所要解决的问题
7.在停车场中,由于车辆以低速移动,因此存在在车辆周围移动的车辆、行人较多的倾向。因此,用于进行上述躲避动作的处理负荷较大。另外,在用于驻车的移动中转弯半径较小,因此有时周围的物体的检测精度降低。本发明的一个方面的目的在于提供一种用于在适当的情况下执行碰撞躲避功能的技术。
8.用于解决问题的手段
9.鉴于上述问题,提供一种控制装置,其是车辆的控制装置,其中,所述控制装置具备:驻车判定部,其判定所述车辆是否想要在驻车空间进行驻车;以及碰撞躲避部,其能够执行用于躲避与向同所述车辆的长度方向交叉的方向进行移动的物体的碰撞的躲避功能,在所述车辆想要在所述驻车空间进行驻车的期间内,在所述车辆的长度方向与所述驻车空间的长度方向所成的角大于阈值的情况下,所述碰撞躲避部使所述躲避功能无效,在所述车辆的长度方向与所述驻车空间的长度方向所成的角小于所述阈值的情况下,所述碰撞躲避部使所述躲避功能有效。
10.发明效果
11.根据上述手段,能够在适当的情况下执行碰撞躲避功能。
附图说明
12.图1是对实施方式所涉及的车辆的构成例进行说明的框图。
13.图2是对实施方式所涉及的碰撞躲避功能进行说明的示意图。
14.图3a以及图3b对实施方式所涉及的驻车时的动作进行说明的图。
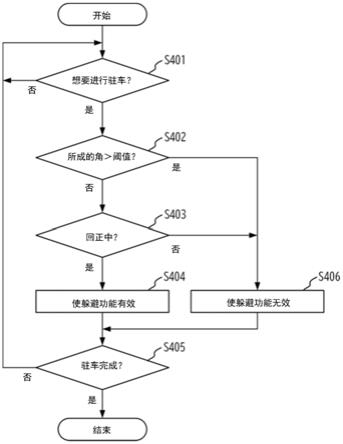
15.图4是对实施方式所涉及的控制方法的详细内容进行说明的流程图。
16.附图标记说明
17.1:车辆;2:控制装置;20~29:ecu;201:交叉路口;202l:检测区域;202r:检测区域。
具体实施方式
18.以下,参照附图对本发明的实施方式进行说明。在各种实施方式中,对相同的要素标注相同的附图标记,并省略重复的说明。另外,各实施方式能够适当地进行变更、组合。
19.图1是本发明的一个实施方式所涉及的车辆1的框图。在图1中,以俯视图和侧视图示出了车辆1的概要。作为一个例子,车辆1是轿车型的四轮乘用车。车辆1可以是这样的四轮车辆,也可以是两轮车辆、其他类型的车辆。
20.车辆1包括对车辆1进行控制的车辆用控制装置2(以下,简称为控制装置2)。控制装置2包括通过车内网络而连接为可通信的多个ecu20~ecu29。各ecu包括以cpu为代表的处理器、半导体存储器等存储器、与外部设备的接口等。在存储器中存储有处理器所执行的程序、处理器在处理中使用的数据等。各ecu可以具备多个处理器、存储器以及接口等。例如,ecu20具备处理器20a和存储器20b。通过由处理器20a执行存储在存储器20b中的程序所包含的命令,由此执行ecu20所进行的处理。取而代之地,ecu20也可以具备用于执行ecu20所进行的处理的asic等专用的集成电路。对于其他ecu而言也是同样的。
21.以下,对各ecu20~ecu29所负责的功能等进行说明。此外,关于ecu的数量、所负责的功能,可以进行适当设计,也可以比本实施方式更细化或者整合。
22.ecu20执行与车辆1的自动行驶相关的控制。在自动驾驶中,对车辆1的转向、加速减速中的至少任一项进行自动控制。基于ecu20的自动行驶可以包括不需要由驾驶员进行的行驶操作的自动行驶(也可以被称为自动驾驶)、和用于对驾驶员所进行的行驶操作进行辅助的自动行驶(也可以被称为驾驶辅助)。
23.ecu21对电动动力转向装置3进行控制。电动动力转向装置3包括根据驾驶员对方向盘31的驾驶操作(转向操作)而使前轮转向的机构。另外,电动动力转向装置3包括发挥用于辅助转向操作或者使前轮自动转向的驱动力的马达、对转向角进行检测的传感器等。在车辆1的驾驶状态为自动驾驶的情况下,ecu21根据来自ecu20的指示而对电动动力转向装置3进行自动控制,并对车辆1的行进方向进行控制。
24.ecu22以及ecu 23进行对检测车辆的周围状况的检测单元41~检测单元43的控制以及检测结果的信息处理。检测单元41是对车辆1的前方进行拍摄的摄像机(以下,有时表述为摄像机41。),在本实施方式的情况下,在车辆1的车顶前部安装于前窗的车厢内侧。通过对摄像机41所拍摄到的图像进行分析,能够提取出目标物的轮廓、道路上的车道的划分线(白线等)。
25.检测单元42是光学雷达(light detection and ranging)(以下,有时表述为光学雷达42),对车辆1的周围的目标物进行检测,或者对与目标物之间的距离进行测距。在本实施方式的情况下,设置有五个光学雷达42,在车辆1的前部的各角部各设置有一个,在后部中央设置有一个,在后部各侧方各设置有一个。检测单元43是毫米波雷达(以下,有时表述为雷达43),对车辆1的周围的目标物进行检测,或者对与目标物之间的距离进行测距。在本实施方式的情况下,设置有五个雷达43,在车辆1的前部中央设置有一个,在前部各角部各设置有一个,在后部各角部各设置有一个。
26.ecu22进行对一方的摄像机41、各光学雷达42的控制以及检测结果的信息处理。ecu23进行对另一方的摄像机41、各雷达43的控制以及检测结果的信息处理。通过具备两组对车辆的周围状况进行检测的装置,能够提高检测结果的可靠性,另外,通过具备摄像机、
光学雷达、雷达这样的不同种类的检测单元,能够多方面地进行车辆的周边环境的分析。
27.ecu24进行对陀螺仪传感器5、gps传感器24b、通信装置24c的控制以及检测结果或通信结果的信息处理。陀螺仪传感器5对车辆1的旋转运动进行检测。能够根据陀螺仪传感器5的检测结果、车轮速度等对车辆1的行进路线进行判定。gps传感器24b对车辆1的当前位置进行检测。通信装置24c与提供地图信息、交通信息的服务器进行无线通信,并获取这些信息。ecu24能够访问在存储器中构建的地图信息的数据库24a,ecu24进行从当前所在地到目的地的路线搜索等。ecu24、地图数据库24a、gps传感器24b构成所谓的导航装置。
28.ecu25具备车与车之间通信用的通信装置25a。通信装置25a与周边的其他车辆进行无线通信,并进行车辆间的信息交换。
29.ecu26对动力装置6进行控制。动力装置6是输出使车辆1的驱动轮旋转的驱动力的机构,例如包括发动机和变速器。ecu26例如根据由设置在油门踏板7a上的操作检测传感器7a所检测到的驾驶员的驾驶操作(油门操作或加速操作)而对发动机的输出进行控制,或者基于车速传感器7c所检测到的车速等信息来切换变速器的变速挡。在车辆1的驾驶状态为自动驾驶的情况下,ecu26根据来自ecu20的指示而对动力装置6进行自动控制,并对车辆1的加速减速进行控制。
30.ecu27对包括方向指示器8(转向灯)的照明器件(前照灯、尾灯等)进行控制。在图1的例子的情况下,方向指示器8设置于车辆1的前部、车门镜以及后部。
31.ecu28进行对输入输出装置9的控制。输入输出装置9进行对驾驶员的信息的输出和来自驾驶员的信息的输入的接受。语音输出装置91通过语音对驾驶员报告信息。显示装置92通过图像的显示对驾驶员报告信息。显示装置92例如配置于驾驶席正面,并构成仪表盘等。此外,在此举例示出了语音和显示,但是也可以通过振动、光来报告信息。另外,也可以组合语音、显示、振动或者光中的多个来报告信息。进一步地,还可以根据待报告的信息的等级(例如紧急度)而使组合不同或者使报告方式不同。输入装置93是配置在驾驶员能够操作的位置而对车辆1进行指示的开关组,还可以包括语音输入装置。
32.ecu29对制动装置10、驻车制动器(未图示)进行控制。制动装置10例如是盘式制动装置,设置于车辆1的各车轮,通过对车轮的旋转施加阻力来使车辆1减速或者停止。ecu29例如根据由设置在制动踏板7b上的操作检测传感器7b所检测到的驾驶员的驾驶操作(制动操作)而对制动装置10的工作进行控制。在车辆1的驾驶状态为自动驾驶的情况下,ecu29根据来自ecu20的指示而对制动装置10进行自动控制,并对车辆1的减速以及停止进行控制。制动装置10、驻车制动器还能够为了维持车辆1的停止状态而进行工作。另外,在动力装置6的变速器具备驻车锁止机构的情况下,还能够为了维持车辆1的停止状态而使所述驻车锁止机构工作。
33.参照图2,对能够由车辆1的控制装置2执行的碰撞躲避功能进行说明。如图2所示,车辆1到达交叉路口201。车辆1能够通过安装于车辆1的前侧左侧方的检测单元43(雷达43)而检测出检测区域202l所包含的物体。另外,车辆1能够通过安装于车辆1的前侧右侧方的检测单元43(雷达43)而检测出检测区域202r所包含的物体。
34.控制装置2在检测到在检测区域202l以及检测区域202r中包含物体的情况下,判定该物体是否有可能与车辆1发生碰撞。例如,控制装置2可以在检测到的物体向与车辆1的长度方向1a交叉的方向移动的情况下,判定为存在发生碰撞的可能性。控制装置2可以进一
步基于车辆1的速度以及物体的速度来判定发生碰撞的可能性。车辆1的长度方向1a也可以被称为车辆1的前后方向。
35.例如,在图2的例子中,设为车辆203也正在朝向交叉路口201行驶。车辆1的控制装置2检测出在检测区域202l中包含车辆203。由于车辆203的长度方向203a与车辆1的长度方向1a交叉,因此控制装置2判定为车辆1有可能与车辆203发生碰撞。
36.在判定为车辆1有可能与其他物体发生碰撞的情况下,控制装置2执行用于躲避与车辆203的碰撞的动作(以下,称为碰撞躲避动作)。具体而言,作为碰撞躲避动作,控制装置2可以通过显示装置92向驾驶员警告有可能与车辆203发生碰撞。取而代之地,或者在此基础上,控制装置2可以通过使制动装置10进行动作而使车辆1减速。控制装置2可以在警告碰撞的可能性时,向驾驶员提示检测到的物体的位置(例如,左或右)和检测到的物体的种类(例如,车辆、人、自行车)。
37.在图2的例子中,作为躲避对象的物体以车辆203为例。取而代之地,躲避对象的物体也可以是人、自行车等其他物体。在图2的例子中,通过雷达43检测到检测区域202l所包含的物体。取而代之地,检测区域202l所包含的物体既可以通过光学雷达、摄像机进行检测,也可以通过光学雷达、摄像机以及雷达的任意的组合来进行检测。对于检测区域202r而言也是同样的。
38.参照图3a以及图3b,对车辆1想要在驻车空间进行驻车的情况下的碰撞躲避动作进行说明。假设车辆1想要在驻车空间301进行驻车。具体而言,车辆1朝向驻车空间301以低速后退,并根据需要为了进行回正而前进。该动作可以通过驾驶员所进行的手动驾驶来进行,也可以通过车辆1所具有的自动驻车功能来进行。
39.将车辆1的长度方向1a与驻车空间301的长度方向301a所成的角表示为角302。驻车空间301的长度方向301a是与车辆1笔直地驻车于驻车空间301的情况下的车辆1的长度方向1a一致的方向。在划出与相邻的驻车空间之间的划分线的情况下,驻车空间301的长度方向301a也可以是与该划分线平行的方向。
40.如图3a所示,在角302较大的情况下,即使存在向车辆1接近的车辆303,车辆303也不包含在检测区域202l以及检测区域202r内。因此,即使控制装置2执行碰撞躲避功能,也无法正确地判定与车辆303发生碰撞的可能性。另一方面,如图3b所示,在角302较小的情况下,车辆303包含在检测区域202l内,因此控制装置2能够正确地判定与车辆303发生碰撞的可能性。因此,在本发明的一部分实施方式中,基于角302的大小来切换碰撞躲避功能的有效/无效。由此,能够减少碰撞躲避功能中的误检测的产生,并且能够减轻控制装置2的运算负荷。在上述的例子中,对驻车空间301的长度方向301a与其他车辆303的行进方向交叉(例如,正交)的情况进行了说明,但如纵列驻车那样,即使上述方向平行也能够应用本发明。
41.接着,参照图4,对控制装置2控制车辆1的方法的一个例子进行说明。图4的方法例如通过由ecu20的处理器20a执行存储在ecu20的存储器20b中的程序的命令来进行处理。取而代之地,也可以由专用的硬件(例如,电路)来执行各步骤。该方法根据车辆1起步而开始执行。
42.在步骤s401中,控制装置2判定车辆1是否想要在驻车空间进行驻车。控制装置2在车辆1想要在驻车空间进行驻车的情况下(步骤s401中的“是”)使处理转移至步骤s402,在除此以外的情况下(步骤s401中的“否”)重复进行步骤s401。这样,在步骤s401中,控制装置
2等待开始进行用于使车辆1驻车于驻车空间的动作。以下的步骤s402~s405在车辆1想要在驻车空间进行驻车的期间内执行。
43.控制装置2可以基于检测单元41~检测单元43的检测结果来判定车辆1是否想要在驻车空间进行驻车。具体而言,控制装置2可以基于在车辆1的附近存在驻车空间且车辆1以向驻车空间接近的方式开始移动(前进或后退)这一情况,判定为车辆1想要在驻车空间进行驻车。取而代之地,控制装置2也可以基于从驾驶员接受到自动驻车功能的开始的指示这一情况,判定为车辆1想要在驻车空间进行驻车。
44.在步骤s402中,控制装置2判定车辆1的长度方向1a与驻车空间的长度方向所成的角是否大于阈值。控制装置2在所成的角大于阈值的情况下(步骤s402中的“是”)使处理转移至步骤s406,在除此以外的情况下(步骤s402中的“否”)使处理转移至步骤s403。在该例子中,在所成的角与阈值相等的情况下,使处理转移至步骤s403,但也可以取而代之地使处理转移至步骤s406。在步骤s402中使用的阈值可以基于检测区域202l以及检测区域202r的大小来决定,并预先存储在存储器20b中。例如,阈值可以为20
°
、30
°
或45
°
等。
45.在步骤s403中,控制装置2判定车辆1是否为了进行回正而正在以远离驻车空间的方式进行移动。控制装置2在车辆1正在以远离驻车空间的方式进行移动的情况下(步骤s403中的“是”)使处理转移至步骤s404,在除此以外的情况下(步骤s403中的“否”)使处理转移至步骤s406。在车辆1暂时停止的情况下,控制装置2可以转移至步骤s404和步骤s406中的任一个步骤。
46.在车辆1正在以向驻车空间接近的方式进行移动的情况下,认为车辆1与向车辆1接近过来的物体发生碰撞的可能性较低。另一方面,在车辆1正在以远离驻车空间的方式进行移动的情况下,车辆1与向车辆1接近过来的物体发生碰撞的可能性变高。尤其是,在车辆1的长度方向1a与驻车空间的长度方向所成的角比阈值小、且如图3b所示那样车辆1的一半以上已经进入驻车空间301的情况下,车辆303有可能想要从车辆1的前方穿过而行驶。因此,在一部分实施方式中,基于车辆1的行进方向来切换碰撞躲避功能的有效/无效。此外,在其他实施方式中,也可以省略步骤s403。
47.在步骤s404中,控制装置2使碰撞躲避功能有效。在步骤s406中,控制装置2使碰撞躲避功能无效。在碰撞躲避功能有效的情况下,控制装置2如在图2中说明的那样执行车辆1的前侧方的物体的检测和基于与检测到的物体的碰撞可能性的碰撞躲避动作。在碰撞躲避功能无效的情况下,控制装置2不执行这样的动作。
48.在步骤s405中,控制装置2判定驻车是否已完成。控制装置2在驻车已完成的情况下(步骤s405中的“是”)结束处理,在除此以外的情况下(步骤s405中的“否”)使处理转移至步骤s401。在处理返回至步骤s401的情况下,控制装置2判定车辆1是否还想要进行驻车。在车辆1停止驻车而移动到其他场所的情况下,控制装置2重复进行步骤s401。
49.<实施方式的总结>
50.<项目1>
51.一种控制装置,其是车辆(1)的控制装置(2),其中,
52.所述控制装置具备:
53.驻车判定部(s401),其判定所述车辆是否想要在驻车空间(301)进行驻车;以及
54.碰撞躲避部,其能够执行用于躲避与向同所述车辆的长度方向交叉的方向(203a)
进行移动的物体(203)的碰撞的躲避功能,
55.在所述车辆想要在所述驻车空间进行驻车的期间内,
56.在所述车辆的长度方向与所述驻车空间的长度方向(301a)所成的角大于阈值的情况下,所述碰撞躲避部使所述躲避功能无效(s402、s406),
57.在所述车辆的长度方向与所述驻车空间的长度方向所成的角小于所述阈值的情况下,所述碰撞躲避部使所述躲避功能有效(s402、s404)。
58.根据该项目,能够在适当的情况下执行碰撞躲避功能。其结果是,能够减轻控制装置的处理负担,并且能够减少误检测的发生。
59.<项目2>
60.根据项目1所述的控制装置,其中,
61.在所述车辆想要在所述驻车空间进行驻车、且所述车辆的长度方向与所述驻车空间的长度方向所成的角小于所述阈值的期间内,
62.在所述车辆正在以向所述驻车空间接近的方式进行移动的情况下,所述碰撞躲避部使所述躲避功能无效(s403、s406),
63.在所述车辆为了进行回正而正在以远离所述驻车空间的方式进行移动的情况下,所述碰撞躲避部使所述躲避功能有效(s403、s404)。
64.根据该项目,能够在更适当的情况下执行碰撞躲避功能。
65.<项目3>
66.根据项目1或2所述的控制装置,其中,
67.所述碰撞躲避部基于设置于所述车辆的前侧方的传感器(43)的检测结果来执行所述躲避功能。
68.根据该项目,能够在更适当的情况下执行碰撞躲避功能。
69.<项目4>
70.一种车辆(1),其具有项目1至3中任一项所述的控制装置(2)。
71.根据该项目,提供具有上述优点的车辆。
72.本发明不限于上述的实施方式,可以在本发明的主旨的范围内进行各种变形、变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。