1.本发明涉及施工检测带电体设备技术领域,特别涉及了一种临近带电体绳索预警器及监测预警方法。
背景技术:
2.电力行业中,抱杆、吊机等施工工艺需要使用钢丝绳等绳索作为起吊塔材的控制绳、临时锚固的拉线。临近带电体施工中,塔材起吊过程的绳索受力、临时锚固过程的绳索受力等使绳索升空,靠近带电体的操作,受视线等因素影响,存在过于接近或者触碰带电体危险。其它类型监测设备采用两点测距,设备固定于绳索上,绳索升空过程中,临近带电体最小距离实时变化造成测量数据与实际距离不符且不能预警。
3.如中国专利局2015年04月29日公开了一种名称为一种高空作业车安全距离控制方法及自动感应系统的发明,其公开号为cn104581061a。该发明中控制方法采用测距装置测量高空作业车与带电体的距离,同时采用摄像头观察带电体方位,从而进行相应的操作,保证安全距离,利用所述方法开发的自动感应系统包括安装于高空作业车上的测距装置以及视频采集控制装置,所述测距装置采用被动测距方式测距的双目测距装置,该装置安装在云台上,采用无线通讯方式与无线通讯控制终端通讯。视频采集控制装置采用无线摄像头采集视频,传送到显示屏显示。本发明能够精确、直观判断出作业车与带电体的实际距离,从根本上杜绝了作业车距离高压带电体太近引起的电网事故和人身伤害事故,给检修施工工作带来了巨大的安全保障。但仅适用于高空作业车,仍无法解决绳索升空过程中,临近带电体最小距离实时变化造成测量数据与实际距离不符的问题。
技术实现要素:
4.本发明的目的是克服现有技术中其它类型临近带电体绳索监测设备采用两点测距,设备固定于绳索上,绳索升空过程中,临近带电体最小距离实时变化造成测量数据与实际距离不符且不能预警的问题,提供了一种临近带电体绳索预警器及监测预警方法,能够实时测算临近带电体最小有效距离,而且能够进行实时预警。
5.为了实现上述目的,本发明采用以下技术方案:一种临近带电体绳索预警器,其特征在于,包括提供电源的电源模块、进行数据处理的控制模块、进行定位数据采集的定位模块、能够报警的报警模块、传输数据的无线通信模块、进行数据显示的显示模块以及终端模块,所述显示模块包括显示屏,所述定位模块包括测量绳索倾角的陀螺仪传感器和测量定点数据的辅助定位仪,所述电源模块、陀螺仪传感器、报警模块、显示模块和无线通信模块均与控制模块连接,所述辅助定位仪与无线通信模块连接,所述无线通信模块与终端模块连接。陀螺仪传感器是一个简单易用的基于自由空间移动和手势的定位的控制系统,可以精确地确定运动物体的方位,本发明中采用陀螺仪传感器测量绳索的倾角;辅助定位仪用于测量定点数据,定点数据即待测点的位置数据。使用时在终端模块上设置基础数据、定位模块搜集位置信息,通过无线通信模块传递到控制模块,控制模块进行数据处理,计算出实
际距离并与安全距离进行比较,判断是否需要进行预警,如果需要,就发送预警信号到报警模块,报警模块会发出警示信号,提醒施工人员,有效地达到预警的作用,为在铁塔上施工人员和控制绳索人员提供安全保障。
6.作为优选,所述的辅助定位仪有三个,所述辅助定位仪包括gps模块,所述gps模块与无线通信模块连接。使用时,三个辅助定位仪分别安装在不同地方,待测点的辅助定位仪通过gps模块采集该点的定点数据。
7.作为优选,所述的报警模块包括声光报警器,所述声光报警器包括led灯和蜂鸣器,所述led灯和蜂鸣器均与控制模块连接。声光报警器接收到来自控制模块的预警信号后,蜂鸣器鸣叫,led灯闪烁,提醒施工人员,有效地达到预警的作用,为在铁塔上施工人员和控制绳索人员提供安全保障。
8.作为优选,所述的无线通信模块包括wifi模块,所述wifi模块与控制模块连接。wifi模块用于接收辅助定位模块的定点数据以及终端模块的初始数据并将其传递给控制模块。
9.本发明提供的一种临近带电体绳索监测预警方法,包括:
10.s1:将临近带电体绳索预警器安装好,在终端模块上设置好基础参数并传递给控制模块;
11.s2:定位模块采集定位数据并将其传递给控制模块;
12.s3:控制模块利用步骤s2中采集到的数据计算出实时最小距离值;
13.s4:比较步骤s1中设置的基础值与步骤s3中得到的最小距离值,判断是否进行预警,若不是,则进入步骤s2,若是,则进入步骤s5;
14.s5:控制模块发出预警信号,驱动声光报警器led灯亮,蜂鸣器鸣叫。
15.终端模块设置基础参数,基础参数是根据现场环境设置的固定值;定位模块用于采集实时的位置信息,便于控制模块计算出实时的最小距离值;通过判断实时最小距离值与设置的基础参数,能够实时判断是否需要预警。如果不需要,则继续计算实时最小距离值;如果需要,则由报警模块进行报警,提示施工人员。
16.作为优选,所述的步骤s1进一步表示为:
17.s1.1:将临近带电体绳索预警器安装在绳索上,三个辅助定位仪安装至绳索锚桩上、离带电体最近的基础腿上及带电体边缘下方;
18.s1.2:在终端模块上带电体垂直高度值y和安全距离预警值z
min
,并通过无线通信模块传递给控制模块。
19.将辅助定位仪安装在不同地方,实时测量该点的位置信息,并通过无线通信模块将采集的信息传递到控制模块;在终端模块上根据现场环境,设置好带电体垂直高度值y和安全距离预警值z
min
,并通过无线通信模块将设置好的数据值传递到控制模块,便于控制模块计算实际最小距离值并与安全距离值进行比较。
20.作为优选,所述的步骤s2中采集的定位数据包括:
21.定位模块的内部陀螺仪传感器实时采集的绳索倾斜角度值θ和定位模块的辅助定位仪实时采集的定点数据。
22.通过陀螺仪传感器和辅助定位仪,能够实现基础腿与临近带电体距离测量及空间范围内对临近带电体的大范围、多角度距离测量。
23.作为优选,所述的步骤s3进一步表示为:
24.s3.1:控制模块将得到的定点数据处理获得基础腿与临近带电体间水平距离x值和基础腿与绳索锚桩间水平距离x0值;
25.s3.2:控制模块根据所有数据计算出实际最小距离值z,计算公式为:
26.z=[(y/tanθ) x
‑
x0]*sinθ,
[0027]
其中,y为带电体垂直高度值,θ为绳索倾斜角度值,x为基础腿与临近带电体间水平距离,x0为基础腿与绳索锚桩间水平距离。
[0028]
通过采集到的数据计算出实际的最小距离值,能在钢丝绳等绳索在升空活动过程,保证测算数据实时准确。
[0029]
因此,本发明具有如下有益效果:1、能在临近带电线路施工中提高安全可靠性;2、能够实现基础腿与临近带电体距离测量及空间范围内对临近带电体的大范围、多角度距离测量;3、能在钢丝绳等绳索在升空活动过程,保证测算数据实时准确;4、设有报警模块,在基础腿与临近带电体距离小于安全距离时进行报警,确保足够安全距离,减少电力事故的发生。
附图说明
[0030]
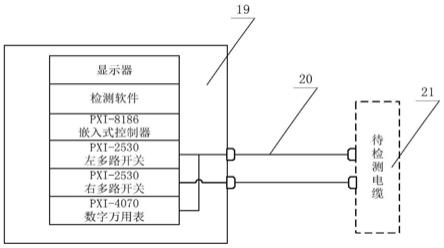
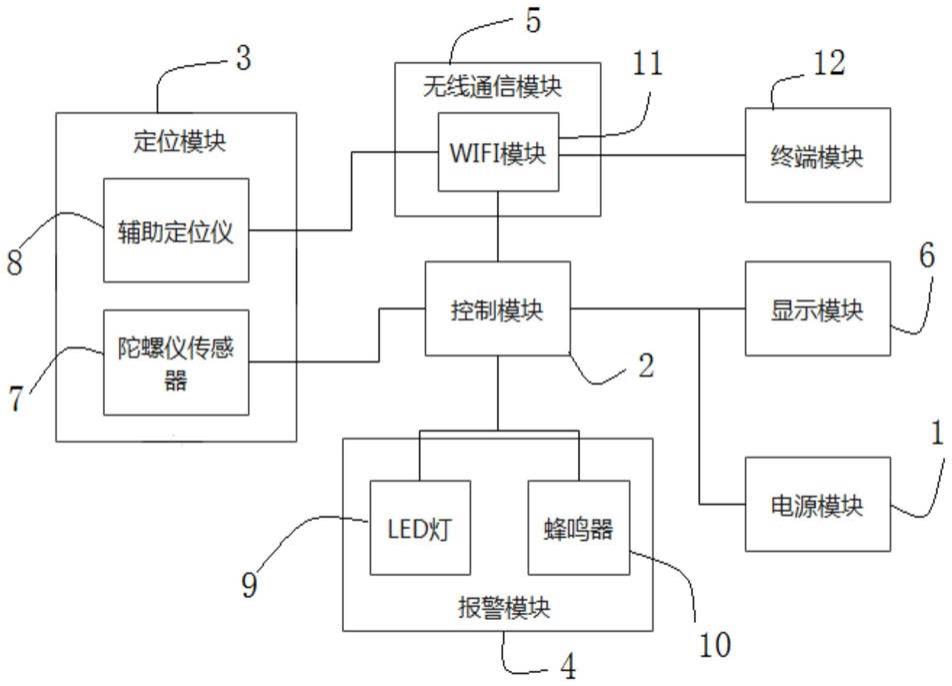
图1是本发明的临近带电体绳索预警器整体结构示意图;
[0031]
图2是本发明的临近带电体绳索监测预警方法流程图;
[0032]
图中:1、电源模块;2、控制模块;3、定位模块;4、报警模块;5、无线通信模块;6、显示模块;7、陀螺仪传感器;8、辅助定位仪;9、led灯;10、蜂鸣器;11、wifi模块;12、终端模块。
具体实施方式
[0033]
下面结合附图与具体实施方式对本发明作进一步详细描述:
[0034]
本实施例为一种临近带电体绳索预警器,如图1所示,包括:
[0035]
电源模块1:为装置提供电源。
[0036]
终端模块12:能够设置带电体垂直高度值和安全距离预警值这两个基础数据,并与无线通信模块5进行交互,将设置的基础数据传递到无线通信模块5;
[0037]
定位模块3:包括辅助定位仪8和陀螺仪传感器7,所述辅助定位仪8包括gps模块,所述辅助定位仪8有三个,分别安装在不同点,用于测量该点的定点数据。辅助定位仪8能够与无线通信模块5交互,将测得的定点数据传递到无线通信模块5。所述陀螺仪传感器7能够测量绳索的倾角,并与控制模块2进行交互,将测量数据传递给控制模块2。
[0038]
无线通信模块5:包括wifi模块11,能够与终端模块12、辅助定位仪8以及控制模块2交互,将终端模块12和辅助定位仪8的数据传递给控制模块1。
[0039]
控制模块2:所述控制模块2能够与无线通信模块5、显示模块6、报警模块4以及定位模块3进行交互,获取定位模块3和无线通信模块5的数据,并根据获取的数据计算出实时的最小距离值,且能比较最小距离值和设置的安全距离预警值,发送预警信号到报警模块4。
[0040]
报警模块5:包括led灯9和蜂鸣器10,能够接收来自控制模块2的预警信号,led灯9亮,同时蜂鸣器10鸣叫,提醒施工人员,有效地达到预警的作用,为在铁塔上施工人员和控
制绳索人员提供安全保障。
[0041]
显示模块6:包括显示屏,显示模块6能够与控制模块2交互,接收控制模块2传递的安全距离、计算得到的实时最小距离值以及其是否为安全距离信息,便于施工人员观看,在报警模块4出问题时施工人员也能通过显示模块6看到此时是否在安全距离内。
[0042]
本实施例为一种临近带电体绳索预警器及监测预警方法,如图2所示,包括:
[0043]
第一步:将临近带电体绳索预警器安装好,在终端模块12上设置好基础参数并传递给控制模块2
[0044]
将临近带电体绳索预警器安装在绳索上,三个辅助定位仪8安装至绳索锚桩上、离带电体最近的基础腿上及带电体边缘下方;在终端模块12上带电体垂直高度值y和安全距离预警值z
min
,并通过无线通信模块5传递给控制模块2。
[0045]
第二步:定位模块3采集定位数据并将其传递给控制模块2
[0046]
定位模块4的内部陀螺仪传感器7实时采集绳索倾斜角度值θ和定位模块4的辅助定位仪8实时采集的安装点的位置数据,并将倾角数据和位置数据实时传递给控制模块2,便于控制模块计算实时最小距离值。
[0047]
第三步:控制模块2利用第二步中采集到的数据计算出实时最小距离值
[0048]
控制模块2将辅助定位仪8采集到的定点数据处理获得基础腿与临近带电体间水平距离x值和基础腿与绳索锚桩间水平距离x0值;控制模块2根据陀螺仪传感器7采集的倾斜角度值θ以及得到的基础腿与临近带电体间水平距离x值和基础腿与绳索锚桩间水平距离x0值计算出实际最小距离值z,计算公式为:
[0049]
z=[(y/tanθ) x
‑
x0]*sinθ,
[0050]
其中,y为带电体垂直高度值,θ为绳索倾斜角度值,x为基础腿与临近带电体间水平距离,x0为基础腿与绳索锚桩间水平距离。
[0051]
第四步:比较第一步中设置的安全距离预警值z
min
与第三步中计算得到的最小距离值,判断是否进行预警,若不是,则回到第二步,继续采集实时位置信息与绳索倾角;若是,则进入第五步。
[0052]
第五步:控制模块2发出预警信号,驱动声光报警器led灯9亮,蜂鸣器10鸣叫,提醒施工人员,有效地达到预警的作用,为在铁塔上施工人员和控制绳索人员提供安全保障。
[0053]
下面继续通过具体的例子,进一步说明本发明的技术方案和技术效果。
[0054]
首先在终端模块上设置好带电体垂直高度值和安全距离预警值,并通过wifi模块将带电体垂直高度值和安全距离预警值传递到控制模块。在电力施工进行临近带电体作业时,在绳索锚桩上、离带电体最近的基础腿上及带电体边缘下方(即绳索两端点和带电体边缘下方)安装辅助定位仪,用辅助定位仪采集定点数据。在钢丝绳等绳索上安装临近带电体绳索预警器,临近带电体绳索预警器通过内部陀螺仪传感器采集倾角数据。wifi模块将接收的定点数据、采集的倾角数据等数据通过rs232串口传输至stm32控制模块,stm32控制模块处理定点数据获得基础腿与临近带电体间水平距离x值(即绳索远端点与带电体间地面水平距离)、基础腿与绳索锚桩间水平距离x0值(即绳索两端点间地面水平距离),然后根据x、x0和倾角、带电体垂直高度值计算出带电体的最小实际距离并与预设的安全距离值作对比;同时stm32控制模块包括声光报警器,能在带电体的最小实际距离小于预设的安全距离值时,提供有效的警示。
[0055]
以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。