1.本发明属于业信息安全技术领域,尤其涉及一种机器人传感器信息安全增强装置与方法。
背景技术:
2.随着机器人的发展,机器人传感器的信息安全问题也随之出现,如机器人传感器数据受到网络中恶意篡改,则会使得机器人出现异常运动;传感器通信缺少数据加密与认证机制,数据在工业机器人与传感器间间传输时,信息有可能泄露。这些问题影响机器人的安全性,甚至对人身安全构成严重威胁。传感器作为机器人主要的信息获取途径,保障传感器与机器人控制器间数据安全传输及传感器的安全十分重要。现在缺乏机器人传感器数据传输的安全保护,在数据传输中相关数据可能被篡改,造成安全隐患。
技术实现要素:
3.为了解决已有技术存在的不足,本发明提出了一种机器人传感器信息安全增强装置与方法,基于信息加密、可信计算、审计技术保障机器人外部传感器数据安全,本发明的具体技术方案如下:
4.一种机器人传感器信息安全增强装置,包括传感器加密终端、认证及安全保护终端以及传感器可信认证模块,其中,
5.所述传感器加密终端包括传感器数据处理模块、传感器数据加解密模块、以及传感器可信连接请求端;在传感器进行可信连接认证时,所述传感器加密终端接收传感器的数据,实现传感器可信连接认证;在传感器数据传输过程中,所述传感器加密终端用于完成输入的传感器数据类型的统一,对传感器发出的数据加密并对传回传感器的数据解密;
6.所述传感器加密终端的传感器数据加解密模块对经传感器数据处理模块处理后的数据进行加密,将加密后的数据发送至所述认证及安全保护终端;所述传感器数据加解密模块对由认证及安全保护终端发送的数据进行解密并发往传感器数据处理模块;
7.所述传感器数据处理模块将数字量或模拟量经调制转化后的数字量发送至所述传感器数据加解密模块;对于所述传感器数据加解密模块传送的数据,发送给传感器或解调后发送至传感器;
8.所述传感器可信连接请求端包括可信连接请求模块和可信连接客户端;其中,所述可信连接请求模块用于接受传感器传送的可信固件参数并转发至所述认证及安全保护终端;可信连接客户端在sm9单向用户鉴别时充当鉴别的声称者;所述可信连接客户端用于接收完整性验证策略和完整性评估结果并最终完成有关报文的处理;
9.所述认证及安全保护终端包括机器人模型安全审计模块、传感器可信连接控制端以及数据加解密模块;在传感器进行可信连接认证中,所述认证及安全保护终端制定完整性度量的策略并对连接过程进行完整性评估;所述认证及安全保护终端接收机器人控制器的可信固件参数,与自身可信根完成可信网络连接;在传感器数据传输的过程中,获取传感
器标识码,生成用户私钥,执行与所述传感器加密终端相反的加解密操作,所述认证及安全保护终端对机器人建模并审计传感器数据;
10.所述认证及安全保护终端中的所述数据加解密模块对由所述传感器加密终端的所述传感器数据加解密模块发送的加密数据进行解密并发送至机器人模型安全审计模块,对由机器人控制器发送的数据进行加密并发送至传感器加密终端;
11.所述机器人模型安全审计模块包括数据库和机器人建模验证模块;其中,所述数据库获取并保存传感器数据和机器人控制器发送的运动数据,以服务于审计;所述机器人建模验证模块获取机器人的参数以建立机器人的运动学模型,并对运动状态进行审计;
12.所述传感器可信连接控制端包括访问控制器和策略管理器,其中,所述访问控制器由控制器信息收集模块和可信连接服务端构成,所述策略管理器则由完整性校验模块、策略评估模块构成;所述控制器信息收集模块收集所述认证及安全保护终端和机器人控制器的可信根与可信固件参数;所述可信连接服务端与所述可信连接客户端收集完整性验证策略与完整性评估结果,与所述策略管理器进行交互并决定最终的访问策略;所述完整性校验模块用于核验所述可信连接客户端与所述可信连接服务端证书;所述策略评估模块用于生成完整性策略,在认证过程中校验并生成完整性度量值;
13.所述传感器可信认证模块包括传感器信息收集模块、所述传感器可信连接请求端及所述传感器可信连接控制端;第一次连接时,所述传感器可信认证模块实现传感器和机器人控制器的绑定,绑定过程为:所述认证及安全保护终端发送传感器认证请求至机器人控制器;所述传感器加密终端获取传感器唯一标识码,发送至所述认证及安全保护终端;由传感器和机器人控制器的标识码确定主密钥以及传感器私钥;绑定时,所述传感器信息收集模块和所述控制器信息收集模块收集传感器的可信根、传感器及机器人控制器的固件参数,在所述策略评估模块中生成完整性策略;
14.后续连接则必须通过可信连接认证:所述传感器加密终端加载传感器可信固件参数,所述认证及安全保护终端加载所述控制器信息收集模块获取的终端设备可信根与终端及机器人控制器的可信固件参数;当传感器向机器人控制器发送连接请求时,所述传感器加密终端接收到此请求,并将此请求发送给所述认证及安全保护终端,在发送前获取传感器的标识码实现所述传感器加密终端为声称者、所述认证及安全保护终端为验证者的sm9单向用户鉴别;
15.所述认证及安全保护终端将生成的完整性验证策略发送至所述可信连接客户端和所述可信连接服务端,实现传感器和所述可信连接客户端的交互;所述认证及安全审计保护终端实现终端及机器人控制器的完整性与所述可信连接服务端的交互,将完整性信息最终发送至所述策略管理器;所述完整性校验模块生成完整性度量值并检查所述可信连接客户端和所述可信连接服务端的认证证书;所述策略评估模块校验完整性度量值,将生成的完整性评估结果发送至所述可信连接客户端和所述可信连接服务端;所述可信连接服务端决定访问策略,并将访问策略发送到所述传感器加密终端及所述认证及安全保护终端;通过发送请求报文实现传感器与机器人控制器的访问连接。
16.进一步地,所述传感器数据加解密模块中密钥由传感器唯一标识码经处理后得到;aes加密函数为e,则c=e(k,p),其中,p为明文,k为密钥,c为密文;即把明文传输数据p和密钥k作为加密函数的参数输入,则加密函数e会输出密文c;aes解密函数为d,则p=d(k,
c),其中,c为密文,k为密钥,p为明文;即把密文c和密钥k作为解密函数的参数输入,则解密函数会输出明文传输数据p。
17.进一步地,所述机器人建模验证模块获取机器人结构参数的方法为:机器人控制系统启动后,由所述机器人建模验证模块从机器人控制器中获取包含机器人结构参数和各轴参数。
18.进一步地,所述机器人建模验证模块获取机器人运动误差阈值的方法为:机器人控制系统启动后,由所述机器人建模验证模块读取存储在机器人控制器中的误差阈值。
19.一种机器人传感器信息安全增强装置的增强方法,包括以下步骤:
20.s1:实现认证与安全保护终端与传感器绑定,绑定包括由认证及安全保护终端获取传感器的唯一标识码,再由认证及安全保护终端获取机器人控制器的唯一标识码,并以明文的方式传输至传感器加密终端,再由传感器加密终端和认证及安全保护终端分别进行标识码的文本叠加,随后进行sha
‑
256加密获取256位的秘钥作为传输加密的主密钥;
21.s2:由认证及安全保护终端根据主密钥和传感器唯一标识码生成传感器的私钥,将私钥保存至认证及安全保护终端,除非收到认证及安全保护终端的重置修改请求,否则不予更改;
22.s3:传感器的公钥即为从传感器获取的传感器唯一标识码;
23.s4:在绑定过程中由传感器和控制器信息收集模块收集传感器的可信根、硬件参数,在策略评估模块中生成传感器的完整性验证策略供后续认证加载;
24.s5:每一次启动时,当传感器向机器人控制器发送连接请求,实现以传感器加密终端为声称者、认证及安全保护终端为验证者的sm9单向身份认证;
25.s6:传感器加密终端加载传感器的可信固件参数,认证及安全保护终端加载控制器信息收集模块获取终端可信根与机器人控制器的可信固件参数;
26.s7:在sm9单向身份认证成功后,认证及安全保护终端将步骤s4中生成的完整性验证策略发送至可信连接客户端和服务端;传感器加密终端进行传感器信息和可信连接客户端的交互;认证及安全保护终端进行终端及机器人控制器的完整性信息与可信连接服务端的交互,发送至策略管理器;完整性校验模块生成完整性度量值并检查可信连接客户端和服务端的认证证书;策略评估模块校验完整性度量值,将生成的完整性评估结果发送至可信连接客户端和服务端;可信连接服务端决定访问策略,将访问策略发送到传感器加密终端及认证及安全保护终端;通过请求报文来实现传感器与机器人控制器的访问连接;
27.s8:访问策略为:完整性认证通过则传输数据,验证未通过则报警;
28.s9:传感器工作时,对机器人控制器和传感器传输数据进行aes加解密,秘钥为sha
‑
256加密后的256位秘钥;
29.s10:对于传感器加密终端的通信,如果是数字量,则直接发送至传感器数据加解密模块进行加密;如果是模拟量,则在传感器数据处理模块中调制成数字量,再发送至传感器数据加解密模块进行加密;传输的数据在认证及安全保护终端中解密;解密后的传感器数据发送到机器人控制器;同理,由机器人控制器发送至传感器的信号先在认证及安全保护终端中的数据加解密模块中加密,随后发送到传感器加密终端的传感器数据加解密模块解密,将解密数据发送到传感器数据处理模块,处理为传感器对应的信号类型再发送给传感器;
30.s11:将数字量使用对应的端口发送,由端口管理模块调配具体工作;
31.s12:从机器人控制器中读取机器人结构参数,在机器人建模验证模块中对机器人运动状态进行建模仿真;
32.s13:获取传感器数据与机器人运动的关系,存入机器人建模验证模块以及关系型数据库中;对于传感器参数与机器人运动参数进行数学建模;
33.s14:对于通讯过程中传感器传入机器人控制器的数据镜像转发至安全审计模块,并将参数存入传感器数据库中;
34.s15:加载机器人建模验证模块中误差阈值,将传感器数据带入仿真模型进行计算,计算结果与机器人控制器传回的数据对比,若机器人控制器对传感器数据变动产生的瞬时值并不在一个去除模型误差后的设定阈值范围内则停机报警。
35.本发明的有益效果在于:
36.1.本发明采用外接安全增强装置的方法保障传感器信息安全,对于不同类型机器人与传感器都有很强的适应性与灵活性。
37.2.本发明基于两个终端的代理可信连接的认证方式安全、便捷且智能,加解密速度快,能够较好地适应工业现场生产环境与要求。
38.3.本发明有针对传感器数据的审计验证,能够保障传感器信息在传输以及控制器内部都得到安全性保障,且事后也可以对传感器数据进行人为分析。
附图说明
39.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中:
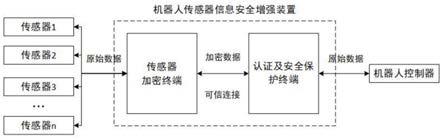
40.图1是本发明的传感器信息安全增强装置连接结构图;
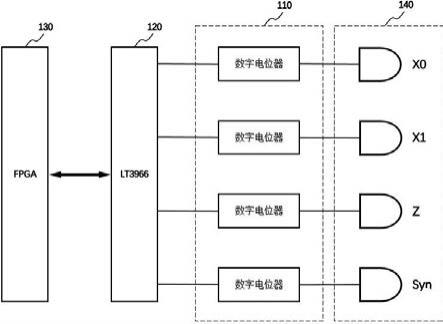
41.图2是本发明的传感器信息安全增强装置在完成认证后的工作方式图。
42.图3是发明的传感器信息安全增强装置的可信认证模块结构图。
具体实施方式
43.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
44.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
45.如图1
‑
3所示,本发明通过在机器人传感器和控制器之间增加防护终端的方式,使用针对不同传感器进行统一的可信网络连接(trusted network connection)认证,并将其传输的数据在转化后进行唯一性密钥加密的方式来保证传输过程的可靠性与机密性,采用机器人建模审计的方法来保障传感器信息在控制器内部的安全,为机器人提供稳定可靠的传感器网络环境。
46.具体地,一种机器人传感器信息安全增强装置,包括传感器加密终端、认证及安全保护终端以及传感器可信认证模块,其中,
47.传感器加密终端包括传感器数据处理模块、传感器数据加解密模块、以及传感器可信连接请求端;在传感器进行可信连接认证时,传感器加密终端接收传感器的数据,实现传感器可信连接认证;在传感器数据传输过程中,传感器加密终端用于完成输入的传感器数据类型的统一,对传感器发出的数据加密并对传回传感器的数据解密;
48.传感器加密终端的传感器数据加解密模块对经传感器数据处理模块处理后的数据进行加密,将加密后的数据发送至认证及安全保护终端;传感器数据加解密模块对由认证及安全保护终端发送的数据进行解密并发往传感器数据处理模块;
49.传感器数据处理模块将数字量或模拟量经调制转化后的数字量发送至传感器数据加解密模块;对于传感器数据加解密模块传送的数据,发送给传感器或解调后发送至传感器;
50.传感器可信连接请求端包括可信连接请求模块和可信连接客户端;其中,可信连接请求模块用于接受传感器传送的可信固件参数并转发至认证及安全保护终端;可信连接客户端在sm9单向用户鉴别时充当鉴别的声称者;可信连接客户端用于接收完整性验证策略和完整性评估结果并最终完成有关报文的处理;
51.认证及安全保护终端包括机器人模型安全审计模块、传感器可信连接控制端以及数据加解密模块;在传感器进行可信连接认证中,认证及安全保护终端制定完整性度量的策略并对连接过程进行完整性评估;认证及安全保护终端接收机器人控制器的可信固件参数,与自身可信根完成可信网络连接;在传感器数据传输的过程中,获取传感器标识码,生成用户私钥,执行与传感器加密终端相反的加解密操作,认证及安全保护终端对机器人建模并审计传感器数据;
52.认证及安全保护终端中的数据加解密模块对由传感器加密终端的传感器数据加解密模块发送的加密数据进行解密并发送至机器人模型安全审计模块,对由机器人控制器发送的数据进行加密并发送至传感器加密终端;
53.机器人模型安全审计模块包括数据库和机器人建模验证模块;其中,数据库获取并保存传感器数据和机器人控制器发送的运动数据,以服务于审计;机器人建模验证模块获取机器人的参数以建立机器人的运动学模型,并对运动状态进行审计;
54.传感器可信连接控制端包括访问控制器和策略管理器,其中,访问控制器由控制器信息收集模块和可信连接服务端构成,策略管理器则由完整性校验模块、策略评估模块构成;控制器信息收集模块收集认证及安全保护终端和机器人控制器的可信根与可信固件参数;可信连接服务端与可信连接客户端收集完整性验证策略与完整性评估结果,与策略管理器进行交互并决定最终的访问策略;完整性校验模块用于核验可信连接客户端与可信连接服务端证书;策略评估模块用于生成完整性策略,在认证过程中校验并生成完整性度量值;
55.传感器可信认证模块包括传感器信息收集模块、传感器可信连接请求端及传感器可信连接控制端;第一次连接时,传感器可信认证模块实现传感器和机器人控制器的绑定,绑定过程为:认证及安全保护终端发送传感器认证请求至机器人控制器;传感器加密终端获取传感器唯一标识码,发送至认证及安全保护终端;由传感器和机器人控制器的标识码
确定主密钥以及传感器私钥;绑定时,传感器信息收集模块和控制器信息收集模块收集传感器的可信根、传感器及机器人控制器的固件参数,在策略评估模块中生成完整性策略;
56.后续连接则必须通过可信连接认证:传感器加密终端加载传感器可信固件参数,认证及安全保护终端加载控制器信息收集模块获取的终端设备可信根与终端及机器人控制器的可信固件参数;当传感器向机器人控制器发送连接请求时,传感器加密终端接收到此请求,并将此请求发送给认证及安全保护终端,在发送前获取传感器的标识码实现传感器加密终端为声称者、认证及安全保护终端为验证者的sm9单向用户鉴别;
57.认证及安全保护终端将生成的完整性验证策略发送至可信连接客户端和可信连接服务端,实现传感器和可信连接客户端的交互;认证及安全审计保护终端实现终端及机器人控制器的完整性与可信连接服务端的交互,将完整性信息最终发送至策略管理器;完整性校验模块生成完整性度量值并检查可信连接客户端和可信连接服务端的认证证书;策略评估模块校验完整性度量值,将生成的完整性评估结果发送至可信连接客户端和可信连接服务端;可信连接服务端决定访问策略,并将访问策略发送到传感器加密终端及认证及安全保护终端;通过发送请求报文实现传感器与机器人控制器的访问连接。
58.在一些实施方式中,传感器数据加解密模块中密钥由传感器唯一标识码经处理后得到;aes加密函数为e,则c=e(k,p),其中,p为明文,k为密钥,c为密文;即把明文传输数据p和密钥k作为加密函数的参数输入,则加密函数e会输出密文c;aes解密函数为d,则p=d(k,c),其中,c为密文,k为密钥,p为明文;即把密文c和密钥k作为解密函数的参数输入,则解密函数会输出明文传输数据p。
59.在一些实施方式中,机器人建模验证模块获取机器人结构参数的方法为:机器人控制系统启动后,由机器人建模验证模块从机器人控制器中获取包含机器人结构参数和各轴参数。
60.在一些实施方式中,机器人建模验证模块获取机器人运动误差阈值的方法为:机器人控制系统启动后,由机器人建模验证模块读取存储在机器人控制器中的误差阈值。
61.一种机器人传感器信息安全增强装置的增强方法,包括以下步骤:
62.s1:实现认证与安全保护终端与传感器绑定,绑定包括由认证及安全保护终端获取传感器的唯一标识码,再由认证及安全保护终端获取机器人控制器的唯一标识码,并以明文的方式传输至传感器加密终端,再由传感器加密终端和认证及安全保护终端分别进行标识码的文本叠加,随后进行sha
‑
256加密获取256位的秘钥作为传输加密的主密钥;
63.s2:由认证及安全保护终端根据主密钥和传感器唯一标识码生成传感器的私钥,将私钥保存至认证及安全保护终端,除非收到认证及安全保护终端的重置修改请求,否则不予更改;
64.s3:传感器的公钥即为从传感器获取的传感器唯一标识码;
65.s4:在绑定过程中由传感器和控制器信息收集模块收集传感器的可信根、硬件参数,在策略评估模块中生成传感器的完整性验证策略供后续认证加载;
66.s5:每一次启动时,当传感器向机器人控制器发送连接请求,实现以传感器加密终端为声称者、认证及安全保护终端为验证者的sm9单向身份认证;
67.s6:传感器加密终端加载传感器的可信固件参数,认证及安全保护终端加载控制器信息收集模块获取终端可信根与机器人控制器的可信固件参数;
68.s7:在sm9单向身份认证成功后,认证及安全保护终端将步骤s4中生成的完整性验证策略发送至可信连接客户端和服务端;传感器加密终端进行传感器信息和可信连接客户端的交互;认证及安全保护终端进行终端及机器人控制器的完整性信息与可信连接服务端的交互,发送至策略管理器;完整性校验模块生成完整性度量值并检查可信连接客户端和服务端的认证证书;策略评估模块校验完整性度量值,将生成的完整性评估结果发送至可信连接客户端和服务端;可信连接服务端决定访问策略,将访问策略发送到传感器加密终端及认证及安全保护终端;通过请求报文来实现传感器与机器人控制器的访问连接;
69.s8:访问策略为:完整性认证通过则传输数据,验证未通过则报警;
70.s9:传感器工作时,对机器人控制器和传感器传输数据进行aes加解密,秘钥为sha
‑
256加密后的256位秘钥;
71.s10:对于传感器加密终端的通信,如果是数字量,则直接发送至传感器数据加解密模块进行加密;如果是模拟量,则在传感器数据处理模块中调制成数字量,再发送至传感器数据加解密模块进行加密;传输的数据在认证及安全保护终端中解密;解密后的传感器数据发送到机器人控制器;同理,由机器人控制器发送至传感器的信号先在认证及安全保护终端中的数据加解密模块中加密,随后发送到传感器加密终端的传感器数据加解密模块解密,将解密数据发送到传感器数据处理模块,处理为传感器对应的信号类型再发送给传感器;
72.s11:将数字量使用对应的端口发送,由端口管理模块调配具体工作;
73.s12:从机器人控制器中读取机器人结构参数,在机器人建模验证模块中对机器人运动状态进行建模仿真;
74.s13:获取传感器数据与机器人运动的关系,存入机器人建模验证模块以及关系型数据库中;对于传感器参数与机器人运动参数进行数学建模;
75.s14:对于通讯过程中传感器传入机器人控制器的数据镜像转发至安全审计模块,并将参数存入传感器数据库中;
76.s15:加载机器人建模验证模块中误差阈值,将传感器数据带入仿真模型进行计算,计算结果与机器人控制器传回的数据对比,若机器人控制器对传感器数据变动产生的瞬时值并不在一个去除模型误差后的设定阈值范围内则停机报警。可能是传感器参数在进入机器人控制器的过程中发生了被篡改或失真,例如力扭矩传感器,当传感器传回机械臂上的外力的信息时,读取机器人控制器中机器人此时的运动参数,将参数(以转动关节为例:各关节的时刻转动角度、速度、加速度),带入拉格朗日动力学模型,得到一个新的机器人状态模型及每一个关节的运动参数,与从机器人控制器获取的其他参数(关节转矩)进行对比,如果结果超出设定的偏差阈值,则发出告警信息。
77.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。