1.本技术属于离合器技术领域,特别涉及一种棘轮离合器脱开转速确定方法。
背景技术:
2.舰用燃气轮机一般使用电起动机作为起动装置,以尽快为舰船提供动力。燃气轮机完成起动后,不需要电起动机继续工作,所以在起动传动链上设置棘轮离合器,以保证完成起动后的燃气轮机与电起动机脱开。然而燃气轮机采用的开关磁阻电起动机输出载荷不稳定,存在过大的冲击载荷,导致起动传动链上的棘轮离合器因承载能力不足而发生棘爪断裂故障,严重影响了使用。
3.如图1和图2所示即为现有技术中采用的棘轮离合器结构示意图,棘轮离合器10由棘轮11和棘轮组件两部分组成,棘轮组件由离合器支撑销 13、销子14、弹簧15、棘爪16和传动齿轮12装配组成。其中,棘轮11与电起动机连接,棘轮组件通过传动齿轮12与燃机转子连接。棘轮离合器的工作原理:电起动机轴带动棘轮11旋转,棘轮11的齿槽槽底顶住棘爪 15,通过销子14驱使传动齿轮12与棘轮11一起旋转,经机匣内齿轮传动 12带动燃机转子起动;而在燃机正常工作时,燃机转子转速达到离合器脱开转速以上时,棘爪16在离心力的作用下使离合器脱开,传动齿轮随燃机转子继续转动,棘轮和起动电机停转。
技术实现要素:
4.本技术的目的是提供了一种棘轮离合器脱开转速确定方法,以解决或减轻背景技术中的至少一个问题。
5.本技术的技术方案是:一种棘轮离合器脱开转速确定方法,所述棘轮离合器包括:
6.呈圆环状的棘轮安装盘,所述棘轮安装盘的内侧具有圆弧形槽;呈盘状的棘轮,所述棘轮的外侧具有多个齿型凹槽;设置在所述棘轮安装盘的圆弧槽和所述棘轮的圆弧形槽之间的棘爪,所述棘爪的头部能够在所述圆弧槽内转动,所述棘爪的尾部能够脱离所述齿型凹槽;以及设置在棘爪的头部与棘轮安装盘之间的弹簧,所述弹簧使棘爪的尾部在预定转速以下时,保持在所述棘轮的齿型凹槽内,预定转速以上时,所述棘爪的尾部与所述棘轮的齿型凹槽脱离;
7.所述脱开转速确定方法包括:
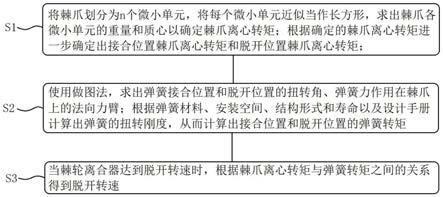
8.s1、将棘爪划分为n个微小单元,将每个微小单元近似当作长方形,求出棘爪各微小单元的重量和质心以确定棘爪离心转矩;
9.根据确定的棘爪离心转矩进一步确定出接合位置棘爪离心转矩和脱开位置棘爪离心转矩;
10.s2、使用做图法,求出弹簧接合位置和脱开位置的扭转角、弹簧力作用在棘爪上的法向力臂;根据弹簧材料、安装空间、结构形式和寿命以及设计手册计算出弹簧的扭转刚度,从而计算出接合位置和脱开位置的弹簧转矩t
at
、t
bt
;
11.s3、当棘轮离合器达到脱开转速时,棘爪离心转矩与弹簧转矩之间应满足如下关
系:t
a
>t
at
和t
b
≥t
bt
。
12.进一步的,所述棘爪离心转矩计算公式为:
[0013][0014]
式中,t为棘爪离心转矩,g
i
为棘爪单元质量,n
t
为脱开转速,r
i
为离心半径,l
i
为扭转半径,β
i
为离心力与扭转半径夹角.
[0015]
进一步的,接合位置棘爪离心转矩计算公式为:
[0016][0017]
式中,r
ai
为接合位置离心半径,β
ai
为接合位置离心力与扭转半径夹角。
[0018]
进一步的,脱开位置棘爪离心转矩:
[0019][0020]
式中,r
bi
为脱开位置离心半径,β
bi
为脱开位置离心力与扭转半径夹角。
[0021]
本技术的棘轮离合器脱开转速确定方法针对新设计的高承载能力棘轮离合器结构,可以精确的确定其脱开转速,保证装置的稳定运行。
附图说明
[0022]
为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
[0023]
图1为现有技术的棘轮离合器结构示意图。
[0024]
图2为本技术的棘轮离合器结构示意图。
[0025]
图3为本技术的棘轮离合器脱开转速确定方法示意图。
[0026]
图4为本技术中的棘爪结合时的棘爪离心转矩示意图。
[0027]
图5为本技术中的棘爪脱开时的棘爪离心转矩示意图。
[0028]
图6为本技术中的弹簧结合时弹簧扭矩示意图。
[0029]
图7为本技术中的棘爪脱开时弹簧扭矩示意图。
具体实施方式
[0030]
为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
[0031]
针对现有技术中的棘轮离合器承载能力不足,本技术中首先提供了一种高承载能力的棘轮离合器,如图2所示,棘轮离合器20包括:呈圆环状的棘轮安装盘22,棘轮安装盘22与传动齿轮25一体结构,棘轮安装盘 22的内侧具有圆弧形槽;呈盘状的棘轮21,棘轮21的外侧具有多个齿型凹槽;设置在棘轮安装盘22的圆弧槽和棘轮21的圆弧形槽之间的棘爪24,棘爪24的头部能够在圆弧槽内转动,棘爪24的尾部能够脱离齿型凹槽;以及设置在棘爪24的头部与棘轮安装盘22之间的弹簧23,弹簧23使棘爪 24的尾部在预定转速以下时,保持在棘轮21的齿型凹槽内,预定转速以上时,棘爪24的尾部与棘轮21的齿型凹槽脱离。
[0032]
针对上述棘轮离合器的结构和工作原理,进一步提出一种棘轮离合器脱开转速确定方法,所述方法根据棘轮离合器工作原理,当转速达到离合器脱开转速时,棘爪离心力作用下产生的相对于棘爪回转中心的扭矩(简称棘爪离心转矩)应大于弹簧作用在棘爪上的力相对于棘爪回转中心的扭矩(简称弹簧转矩),具体包括如下步骤:
[0033]
s1、棘爪离心转矩计算
[0034]
采用作图法和有限元思想进行棘爪离心转矩的计算,将棘爪划分为n 个微小单元,如图4和图5,可将每个微小单元近似当作长方形,求出棘爪各单元的重量和质心,其中,棘爪离心转矩计算方法为:
[0035][0036]
式中:
[0037]
t为棘爪离心转矩(单位n.mm);
[0038]
g
i
为棘爪单元质量(单位g);
[0039]
n
t
为脱开转速(单位rpm);
[0040]
r
i
为离心半径(单位mm);
[0041]
l
i
为扭转半径(单位mm);
[0042]
β
i
为离心力与扭转半径夹角(单位
°
)。
[0043]
根据棘爪离心转矩计算接合位置棘爪离心转矩:
[0044][0045]
式中:
[0046]
r
ai
为接合位置离心半径(单位mm);
[0047]
β
ai
为接合位置离心力与扭转半径夹角(单位
°
)。
[0048]
根据棘爪离心转矩计算脱开位置棘爪离心转矩:
[0049][0050]
式中:
[0051]
r
bi
为脱开位置离心半径(单位mm);
[0052]
β
bi
为脱开位置离心力与扭转半径夹角(单位
°
)。
[0053]
s2、弹簧转矩计算
[0054]
使用做图法,求出弹簧接合位置和脱开位置的扭转角、弹簧力作用在棘爪上的法向力臂,见图6和图7。综合考虑弹簧材料、安装空间、结构形式和寿命,根据设计手册计算出弹簧的扭转刚度,从而计算出接合位置和脱开位置的弹簧转矩t
at
、t
bt
。
[0055]
s3、棘轮离合器脱开条件
[0056]
当棘轮离合器达到脱开转速时,棘爪离心转矩与弹簧转矩之间应满足如下关系:t
a
>t
at
和t
b
≥t
bt
。
[0057]
通过对上述公式进行联立,可得到本技术的棘轮离合器的脱开转速。
[0058]
本技术的棘轮离合器脱开转速确定方法针对新设计的高承载能力棘轮离合器结构,可以精确的确定其脱开转速,保证装置的稳定运行。
[0059]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

