1.本发明涉及监控设备领域,特别涉及一种用于园林建筑工程管理的监控装置。
背景技术:
2.在兴建园林建筑的时候,都需要通过监控的方式对园林的建筑工程进行管理,一般的会在工程现场安装监控摄像头,这样就可以得到建筑工程的全貌,但是园林建筑是一个细致的工程,通过这样的方式很难得到建筑施工的细节部分,因此,在园林监控的时候,都会在工程现场各个位置进行监控,使得拍摄到整个施工现场的细节部分,之后在根据监控的位置将所拍摄的监控视频进行拼接,得到整体的施工视频,但是在一个未完工的施工现场,gps的定位不准确,使得所得到的的监控位置也不准确,从而使得在视频拼接的时候,整体的施工视频无法直观的体现出园林建设的过程。
技术实现要素:
3.本发明的目的是克服上述现有技术中存在的问题,提供一种用于园林建筑工程管理的监控装置,通过在依次拼接的轨道上录入位置信息,使得监控车辆经过的时候识别轨道上的位置信息,使得拍摄的视频和位置信息一一的对应起来,从而使得在进行视频的拼接的时候,位置信息的精准性会使得拼接后的施工视频完整流畅。
4.为此,本发明提供一种用于园林建筑工程管理的监控装置,包括:轨道、能够在所述轨道上运行的监控车辆以及视频处理器;所述轨道的数量有若干个,若干个所述轨道的首尾依次通过连接件连接,所述轨道上设置有用于标记所述轨道的位置信息的电子标签;所述监控车辆包括车身、摄像头、阅读器、滚轮、第一处理器以及第一电源;所述车身位于所述轨道的上方;所述滚轮设置在所述所述车身的底部,所述滚轮能够在所述轨道上滚动;所述摄像头设置在所述车身的顶部,用于拍摄视频;所述阅读器设置在所述车身的底部,用于识别所述电子标签中的内容;所述第一处理器,用于将每一个电子标签所存储的位置与该位置下所述摄像头所拍摄的视频相对应,并存储;第一电源,用于给所述摄像头、阅读器以及第一处理器提供供电;所述视频处理器用于将所述第一处理器所存储的位置以及位置所对应的视频根据位置进行拼接,得到施工视频。
5.进一步,所述监控车辆通过驱动机构驱动其在所述轨道上运行。
6.更进一步,所述轨道上设置有第二处理器以及第二电源,所述驱动机构包括:方向传感器,设置在所述轨道上,用于检测所述监控车辆的行进方向;舵机,设置在所述轨道的中央,其输出轴连接有长度可变的第一伸缩杆,所述第一伸缩杆的一端连接在所述舵机的输出轴上,所述第一伸缩杆的另一端连接有电磁铁;铁片,设置在所述所述车身的底部;所述第二处理器接收所述方向传感器所检测到的所述监控车辆的行进方向,当所述监控车辆快要到来的时候,控制所述电磁铁进入工作状态从而产生磁力,同时控制所述舵机向所述监控车辆的行进方向转动180度,当所述舵机转动到145度的时候,控制所述电磁铁停止工作状态从而磁力消失;所述第二电源,用于给所述方向传感器、舵机、电磁铁以及第二处理
器供电。
7.更进一步,所述方向传感器包括:电子接收器,设置在所述导轨上,用于接收电子信号;电子发射器,其数量有两个,分别倾斜向下的设置在所述车身的左右两侧,用于发射电子信号;当所述电子接收器接收到所述电子发射器发射的电子信号的时候,认为所述监控车辆即将行进到该导轨上。
8.进一步,所述轨道包括:轨廓,其数量有两个,两个所述轨廓平行设置;轨面,设置在两个所述轨廓之间,用于连接两个所述轨廓;所述连接件分别用于连接每一个所述轨廓长度方向的两端。。
9.更进一步,所述轨面由多个依次平行设置的导杆组成,每一个所述导杆的左右两端分别连接在所述轨廓上。
10.更进一步,所述轨廓有多个依次首尾相接的第二伸缩杆组成,每一个所述第二伸缩杆的长度可变,相邻的两个所述第二伸缩杆之间通过铰接件连接,所述导杆连接在所述铰接件上。
11.进一步,所述视频处理器将所述第一处理器所存储的位置以及位置所对应的视频根据位置进行拼接的时候,包括如下步骤:获取第一处理器所存储的位置以及该位置所对应的视频;将所述视频分解为各个视频帧,使得每一个所述视频帧分别对应一个时间戳和位置;将相同时间戳的所述视频帧根据位置平铺,拼合成为施工视频帧;使得每一个所述施工视频帧对应一个时间戳;根据时间戳将所述施工视频帧进行处理,得到所述施工视频。
12.本发明提供的一种用于园林建筑工程管理的监控装置,具有如下有益效果:
13.1、本发明通过在依次拼接的轨道上录入位置信息,使得监控车辆经过的时候识别轨道上的位置信息,使得拍摄的视频和位置信息一一的对应起来,从而使得在进行视频的拼接的时候,位置信息的精准性会使得拼接后的施工视频完整流畅;
14.2、本发明的各节轨道上设置用于使得监控车辆前进的驱动机构,用过各节轨道将监控车辆的行进控制,使得监控车辆可以正常的在轨道上进行行进;
15.3、本发明可以使得多台监控车辆同时在轨道上行进,最后将每一个台监控车辆的视频进行处理,将相同时间戳的视频帧进行拼接,最后得到整体的施工视频,从而保证施工视频可以展现出各个施工的细节部分。
附图说明
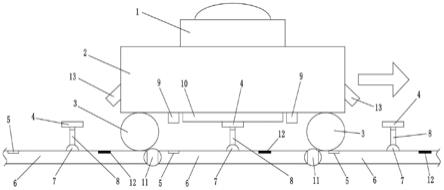
16.图1为本发明的整体结构示意图;
17.图2为本发明的轨道的结构示意图;
18.图3为本发明视频处理器的工作流程示意框图。
19.附图标记说明:
20.1、摄像头;2、车身;3、滚轮;4、电磁铁;5、电子标签;6、轨道;6
‑
1、轨廓;6
‑
2、轨面;7、舵机;8、第一伸缩杆;9、阅读器;10、铁片;11、连接件;12、电子接收器;13、电子发射器。
具体实施方式
21.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
22.在本技术文件中,未经明确的部件型号以及结构,均为本领域技术人员所公知的现有技术,本领域技术人员均可根据实际情况的需要进行设定,在本技术文件的实施例中不做具体的限定。
23.具体的,如图1
‑
3所示,本发明实施例提供了一种用于园林建筑工程管理的监控装置,包括:轨道6、能够在所述轨道6上运行的监控车辆以及视频处理器;下面就分别对轨道6、监控车辆以及视频处理器进行介绍。
24.所述轨道6的数量有若干个,若干个所述轨道6的首尾依次通过连接件11连接,所述轨道6上设置有用于标记所述轨道6的位置信息的电子标签5;本发明将使用设定的电子标签将轨道6的位置进行标记,这样就可以使得将每一个轨道6的位置全部明确,无需使得每一个轨道6与gps定位进行实时的通信,可以使用专有的坐标,使得轨道6的位置更加的准确。
25.所述监控车辆包括车身2、摄像头1、阅读器9、滚轮3、第一处理器以及第一电源;其中,所述车身2位于所述轨道6的上方;所述滚轮3设置在所述所述车身2的底部,所述滚轮3能够在所述轨道6上滚动;所述摄像头1设置在所述车身1的顶部,用于拍摄视频;所述阅读器9设置在所述车身1的底部,用于识别所述电子标签5中的内容;所述第一处理器,用于将每一个电子标签5所存储的位置与该位置下所述摄像头1所拍摄的视频相对应,并存储;第一电源,用于给所述摄像头1、阅读器9以及第一处理器提供供电;本发明的监控车辆是一个视频信息采集的过程,通过在轨道6上行进的同时,对施工现场的视频信息就可以得到全面的采集,并且可以得到每一个位置所对应的视频。
26.所述视频处理器用于将所述第一处理器所存储的位置以及位置所对应的视频根据位置进行拼接,得到施工视频。视频处理器是对于将采集到的视频根据位置进行处理的过程,这样就可以使得得到施工视频,从而使得所得到的视频的稳定性更好。
27.在本发明中,视频处理器可以单独的设置在监控室中,监控车辆的数据可以不单单只有一台,可以多台监控车辆同时在轨道6上进行行进和作业,这样就可以使得将得到的施工视频中,同时使用时间戳和位置进行拼接,得到完整的施工视频。
28.在本实施例中,所述监控车辆通过驱动机构驱动其在所述轨道6上运行。这样就可以使得监控车辆在轨道6上自主的进行行进,从而使得监控车辆与轨道6可以分开进行管理和维护。
29.同时,在本实施例中,所述轨道6上设置有第二处理器以及第二电源,所述驱动机构包括:方向传感器、舵机7以及铁片10。其中,方向传感器设置在所述轨道6上,用于检测所述监控车辆的行进方向;舵机7设置在所述轨道6的中央,其输出轴连接有长度可变的第一伸缩杆8,所述第一伸缩杆8的一端连接在所述舵机7的输出轴上,所述第一伸缩杆8的另一端连接有电磁铁4;铁片10设置在所述所述车身1的底部;所述第二处理器接收所述方向传感器所检测到的所述监控车辆的行进方向,当所述监控车辆快要到来的时候,控制所述电磁铁4进入工作状态从而产生磁力,同时控制所述舵机7向所述监控车辆的行进方向转动180度,当所述舵机7转动到145度的时候,控制所述电磁铁4停止工作状态从而磁力消失;所述第二电源,用于给所述方向传感器、舵机7、电磁铁4以及第二处理器供电。
30.上述技术方案中,通过拨动的方式将监控车辆进行拨动,在每一次拨动的时候,可以使得监控车辆至少行进一个轨道6的距离,这样就可以使得持续的为监控车辆提供动力,
使得监控车辆可以在轨道上行进,这样就将监控车辆的驱动,下至在轨道上,相对于内置在监控车辆的底部更加容易的找到故障的问题,易于维护。
31.同时,在本实施例中,所述方向传感器包括:电子接收器12和电子发射器13。其中,电子接收器12设置在所述导轨6上,用于接收电子信号;电子发射器13的数量有两个,分别倾斜向下的设置在所述车身1的左右两侧,用于发射电子信号;当所述电子接收器12接收到所述电子发射器13发射的电子信号的时候,认为所述监控车辆即将行进到该导轨6上。
32.上述技术方案中,根据接电子发射器13收到信号的顺序,得到监控车辆的行进方向,这样就可以使得相邻的轨道6上的驱动机构进入工作状态,使得为监控车辆提供源源不断的动力。
33.在本实施例中,所述轨道6包括:轨廓6
‑
1以及轨面6
‑
2。其中,轨廓6
‑
1的数量有两个,两个所述轨廓6
‑
1平行设置;轨面6
‑
2设置在两个所述轨廓6
‑
1之间,用于连接两个所述轨廓6
‑
1;所述连接件11分别用于连接每一个所述轨廓6
‑
1长度方向的两端。。
34.同时,在本实施例中,所述轨面6
‑
2由多个依次平行设置的导杆组成,每一个所述导杆的左右两端分别连接在所述轨廓6
‑
1上。这样就可以使得轨道6的稳定性更好。
35.同时,在本实施例中,所述轨廓6
‑
1有多个依次首尾相接的第二伸缩杆组成,每一个所述第二伸缩杆的长度可变,相邻的两个所述第二伸缩杆之间通过铰接件连接,所述导杆连接在所述铰接件上。这样就可以使得轨道6的形状发生改变,根据情况可以调节轨道6弯曲,这样就会使得在需要拐弯的时候,易于调节。
36.在本实施例中,所述视频处理器将所述第一处理器所存储的位置以及位置所对应的视频根据位置进行拼接的时候,包括如下步骤:
37.(一)获取第一处理器所存储的位置以及该位置所对应的视频;
38.(二)将所述视频分解为各个视频帧,使得每一个所述视频帧分别对应一个时间戳和位置;
39.(三)将相同时间戳的所述视频帧根据位置平铺,拼合成为施工视频帧;
40.(四)使得每一个所述施工视频帧对应一个时间戳;
41.(五)根据时间戳将所述施工视频帧进行处理,得到所述施工视频。
42.上述步骤中,步骤(一)至步骤(五)依次按照顺序进行,最终得到施工视频,在步骤(一)中,获取第一处理器所存储的位置以及该位置所对应的视频,得到要处理的数据,这样就可以使得保证数据的充足,步骤(二)是根据柜子将步骤(一)中的视频进行排列,步骤(三)是合成各个视频正的过程,步骤(四)是将视频帧和时间戳对应的过程,步骤(五)是将视频帧合成视频的过程,最后的得到所述施工视频。这样就可以使得将所得到的视频更加的完整,完整的反应各个阶段的状态,易于人员的观看。
43.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。