1.本发明涉及自移动机器人工作区域虚拟边界的生成方法、系统、自移动机器人及可读存储介质,尤其涉及一种可提高工作效率的自移动机器人工作区域虚拟边界的生成方法、系统、自移动机器人及可读存储介质。
背景技术:
2.随着科学技术的不断进步,各种机器人已经开始慢慢的走进人们的生活,例如:自动吸尘机器人、自动割草机器人等。这种机器人能够脱离人们的操作,在一定范围内自动行走并执行工作。
3.全覆盖路径规划是机器人的一个热点研究方向,对于提高机器人的工作效率至关重要;现有技术中,通常采用的技术方案为,人工辅助规划工作路径,之后再驱动机器人按照规划好的工作路径进行工作;具体的,配合机器人设置一人工辅助输入界面,通过自动或辅助的方式收集当前地形输出至输入界面,并通过人工辅助的方式在输入界面上依据收集的地形绘画工作路径;最后将该工作路径转换为指令指导机器人工作。
4.上述技术方案,通常需要增加摄像头等辅助设备获取数据,提高设备的生产及使用成本,另外,还需要人工辅助设计工作路径,使用较为繁琐。
技术实现要素:
5.本发明提供一种可提高工作效率的自移动机器人工作区域虚拟边界的生成方法、系统、自移动机器人及可读存储介质。
6.本发明提供一种自移动机器人工作区域虚拟边界的生成方法,所述方法包括以下步骤:
7.获取可移动的定位模块沿巡线路径环绕预定圈数的若干记录点,所述巡线路径为自移动机器人所在工作区域的边界形成的回路;所述预定圈数大于等于 2;
8.将行走第1圈对应的记录点存储于第一存储链表,将剩余的记录点存储于第二存储链表;
9.依次调取第一存储链表中的每一个记录点作为基础坐标点,并查询第二存储链表以依次选取对应每一基础坐标点的m个记录点组,每个记录点组包括与第一存储链表中当前选取的基础坐标点距离最近的多个记录点,且m个记录点组的记录点的数目依次递增;所述m为不小于1的整数;
10.根据每个基础坐标点及其对应的m个记录点组分别获取对应该基础坐标点的边界拟合点,并将多个所述边界拟合点的集合形成边界拟合点序列;
11.根据所述边界拟合点序列获得边界点;
12.将所述边界点依次连接生成工作区域的虚拟边界。
13.可选地,所述定位模块为手持装置,所述手持装置可拆卸装设第一uwb 定位模块,
所述自移动机器人设置第二uwb定位模块;其中,
14.在自移动机器人进行边界学习的应用场景下,所述第一uwb定位模块装设于所述手持装置并沿巡线路径环绕,所述第一uwb定位模块为第一uwb定位标签;所述第二uwb定位模块为第二uwb定位基站,所述第二uwb定位基站位于预设基站位置处;
15.在自移动机器人进行定位导航的应用场景下,所述第一uwb定位模块自所述手持装置分离并位于预设基站位置处,所述第一uwb定位模块为第一 uwb定位基站,所述第二uwb定位模块为第二uwb定位标签并随所述自移动机器人移动。
16.可选地,在所述自移动机器人进行边界学习的应用场景下,所述第一uwb 定位标签侦测取样确认信号,并根据所述取样确认信号计算记录点的位置坐标,并将记录点的位置坐标发送给所述自移动机器人,其中,所述取样确认信号为手持装置沿巡线路径移动时所接收的第一按键信号。
17.可选地,在所述自移动机器人进行边界学习的应用场景下,所述生成方法在依次调取第一存储链表中的每一个记录点作为基础坐标点之前还包括以下步骤:
18.所述自移动机器人侦测所述取样完成信号,并根据所述取样完成信号执行依次调取第一存储链表中的每一个记录点作为基础坐标点,其中,所述取样完成信号为手持装置于巡线路径结束时接收的第二按键信号。
19.可选地,所述定位模块为可拆卸装设于自移动机器人的uwb定位插件,在自移动机器人进行边界学习的应用场景下,所述uwb定位插件用于充当可移动的定位模块沿巡线路径环绕;在自移动机器人进行定位导航的应用场景下,所述uwb定位插件装设于自移动机器人端。
20.可选地,所述第一uwb定位标签按照预定间隔时间或按照预定距离计算记录点的位置坐标,并将记录点的位置坐标发送给所述自移动机器人。
21.可选地,所述根据所述边界拟合点序列获得边界点进一步包括以下步骤:
22.判断边界拟合点序列中的任一边界拟合点与其相邻的两个边界拟合点是否共线,若是,则以当前边界拟合点为基础,并在通过当前边界拟合点的法线上等距偏移获取对应的边界点;将边界拟合点以及其相邻的两个边界拟合点生成圆,若否,则以当前边界拟合点为基础,并在通过当前边界拟合点与其所在圆的圆心连线上等距偏移获取对应的边界点。
23.本发明还提供一种自移动机器人工作区域虚拟边界的生成系统,所述系统包括:
24.记录存储模块,用于获取可移动的定位模块沿巡线路径环绕预定圈数的若干记录点,所述巡线路径为自移动机器人所在工作区域的边界形成的回路;所述预定圈数大于等于2;以及用于将行走第1圈对应的记录点存储于第一存储链表,将剩余的记录点存储于第二存储链表;
25.调取模块,用于依次调取第一存储链表中的每一个记录点作为基础坐标点,并查询第二存储链表以依次选取对应每一基础坐标点的m个记录点组,每个记录点组包括与第一存储链表中当前选取的基础坐标点距离最近的多个记录点,且m个记录点组的记录点的数目依次递增;所述m为大于1的整数;
26.拟合模块,用于根据每个基础坐标点及其对应的m个记录点组获取该基础坐标点的边界拟合点,并将多个所述边界拟合点的集合形成边界拟合点序列;
27.处理模块,用于根据所述边界拟合点序列获得边界点,并用于将所述边界点依次
连接生成工作区域的虚拟边界。
28.本发明还提供一种自移动机器人,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述自移动机器人工作区域虚拟边界的生成方法的步骤。
29.本发明又提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述自移动机器人工作区域虚拟边界的生成方法的步骤。
30.相较于现有技术,本发明在自移动机器人进行边界学习的应用场景下,借由可移动的定位模块沿巡线路径环绕预定圈数以获取各个记录点的位置坐标,通过多次获取的记录点位置坐标自动校正以自动生成自移动机器人的虚拟边界;无需人工辅助输入相关参数,节省人力成本,提高工作效率。
附图说明
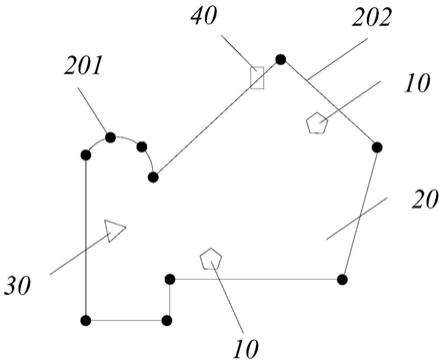
31.图1为本发明自移动机器人进行边界学习的第一应用场景,其中,手动控制手持装置获取记录点,记录点的位置包括直线边界的拐点及非直线边界的中间点位置;
32.图2为本发明自移动机器人根据工作区域的虚拟边界进行定位导航的第一应用场景;
33.图3为本发明自移动机器人进行边界学习的第二应用场景,其中,定时控制手持装置获取记录点;
34.图4为本发明自移动机器人进行边界学习的第三应用场景,其中,定时控制从自移动机器人端取下的uwb定位插件获取记录点;
35.图5为本发明自移动机器人工作区域虚拟边界的生成方法的第一实施例的流程图;
36.图6为本发明自移动机器人工作区域虚拟边界的生成方法的第二实施例的流程图;
37.图7为图5中步骤s4的具体流程图;
38.图8为图5中步骤s5的具体流程图;
39.图9为图8的一具体示例的应用效果图;
40.图10为本发明自移动机器人工作区域虚拟边界的生成系统的原理方框图。
具体实施方式
41.为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
42.请参阅图1-图10所示,本发明自移动机器人30可以是自动割草机,或者自动吸尘器等,其自动行走于工作区域20以进行割草、吸尘等工作。所述自移动机器人30可通过可移动的定位模块与定位基站10获取工作区域20的记录点 201并自动生成工作区域20的虚拟边界,所述工作区域内部或者边缘布置至少三个带可充电电池的定位基站10,所述定位基
站10可为uwb基站或zigbee 基站等。所述可移动的定位模块可独立于自移动机器人30完成记录坐标位置与发送坐标位置的功能,例如,可为专用的手持装置40,或为可拆卸装设于自移动机器人30的uwb定位插件31。
43.在本发明的一个实施例中,手持装置40具有内置的第一uwb定位模块,或将其一定位基站10可拆卸装设于手持装置40以用于充当所述手持装置40的第一uwb定位模块,所述第一uwb定位模块用于记录坐标位置并发送坐标位置至自移动机器人30。本发明自移动机器人30设置第二uwb定位模块。根据不同的应用场景,切换所述第一uwb定位模块与第二uwb定位模块的使用状态。
44.请参阅图1所示,在自移动机器人30进行边界学习的应用场景下,所述用于充当第一uwb定位模块的定位基站10装设于所述手持装置40并沿巡线路径202环绕,所述第一uwb定位模块为第一uwb定位标签;所述第二uwb 定位模块为第二uwb定位基站,所述第二uwb定位基站(即自移动机器人 30)位于预设基站位置处(预设基站位置对应的基站用于充当所述手持装置40 的第一uwb定位模块)。
45.请参阅图2所示,在自移动机器人30进行定位导航的应用场景下,所述用于充当第一uwb定位模块的定位基站10自所述手持装置分离并位于预设基站位置处,所述用于充当第一uwb定位模块的定位基站10恢复成第一uwb定位基站,所述第二uwb定位模块为第二uwb定位标签并随所述自移动机器人 30移动。
46.手持装置40携带第一uwb定位标签移动以作为定位模块,可通过手动控制或定时控制方式计算定位标签的当前位置与定位基站(两个定位基站10及自移动机器人30的第二uwb定位模块)之间的距离以确定定位标签的坐标位置 (即记录点201)。
47.记录点201的获取方式具有多种,例如:手动控制获取、按照预定间隔时间获取、按照预定距离获取等方式,仅需保证记录点201位于机器人行走过程中所通过巡线路径202之上即可。
48.请参阅图1所示,手动控制手持装置40获取记录点201,记录点201的位置包括直线边界的拐点及非直线边界的中间点位置,在本发明的另一个实施例中,在所述自移动机器人进行边界学习的应用场景下,所述第一uwb定位标签侦测取样确认信号,并根据所述取样确认信号计算记录点201的位置坐标,并将记录点201的位置坐标发送给所述自移动机器人,其中,所述取样确认信号为手持装置40沿巡线路径202移动时所接收的第一按键信号,所述第一按键信号可为使用者手持装置40沿巡线路径202移动预设位置(直线边界的拐点及非直线边界的中间点)单次按压手持装置40上的确认键(未图示)而产生。使用者也可通过手机app操作以产生第一按键信号。
49.请参阅图3所示,手持装置40可按照预定间隔时间获取、按照预定距离获取等方式自动获取记录点201的位置,在本发明的另一个实施例中,所述第一uwb定位标签按照预定间隔时间计算记录点201的位置坐标,并将记录点201的位置坐标发送给所述自移动机器人30。例如,预定间隔时间为50ms,此时,记录点201不再局限于拐点。
50.请参阅图4所示,在本发明的另一个实施例中,所述定位模块为可拆卸装设于自移动机器人30的uwb定位插件31,在自移动机器人30进行边界学习的应用场景下,所述uwb定位插件31从自移动机器人30分离并用于手持使用;在自移动机器人进行定位导航的应用场景下,所述uwb定位插件31 插设于自移动机器人端。
51.请参阅图5所示,手持装置40或自移动机器人30沿巡线路径202行走,可通过多圈巡行的方式获取记录点201的位置坐标。本发明提供一种自移动机器人工作区域虚拟边界的生成方法,其包括以下步骤:
52.s1、获取可移动的定位模块沿巡线路径环绕预定圈数的若干记录点,所述巡线路径为自移动机器人所在工作区域的边界形成的回路;所述预定圈数大于等于2;
53.s2、将行走第1圈对应的记录点存储于第一存储链表,将剩余的记录点存储于第二存储链表;
54.s3、依次调取第一存储链表中的每一个记录点作为基础坐标点,并查询第二存储链表以依次选取对应每一基础坐标点的m个记录点组,每个记录点组包括与第一存储链表中当前选取的基础坐标点距离最近的多个记录点,且m个记录点组的记录点的数目依次递增;所述m为不小于1的整数;
55.s4、根据每个基础坐标点及其对应的m个记录点组分别获取对应该基础坐标点的边界拟合点,并将多个所述边界拟合点的集合形成边界拟合点序列;
56.s5、根据所述边界拟合点序列获得边界点;
57.s6、将所述边界点依次连接生成工作区域的虚拟边界。
58.需要说明的是,根据工作环境的不同,所述虚拟边界可选择地包括外边界和/或内边界;巡线路径通常由用户辅助指定,或是采用定点标记、外设磁场的方式指定,该巡线路径为工作区域的边界形成的回路,当界定工作区域在某一边界之内时,该边界为外边界,即外边界为工作区域最外侧的边界,其具有唯一性;当同时界定工作区域在某一边界之外时,该边界为内边界,内边界和外边界相互配合以限定工作区域。所述预定圈数越大,则最终获得的结果更加精准,本发明较佳实施方式中,考虑到计算的复杂程度,所述预定圈数通常取值 2至5之间的任一数值。
59.可以理解的是,对于同一工作区域,手持装置40或自移动机器人30沿巡线路径行走预定圈数过程中,其每圈的巡线路径形状基本相同但通常不会完全相同,每圈获取的记录点的数目可能相等也可能不等。
60.请参阅图6所示,在本发明的另一个实施例中,手持装置40可产生取样完成信号并发送给自移动机器人30,在所述自移动机器人进行边界学习的应用场景下,所述生成方法在步骤s2与步骤s3之间还包括以下步骤:
61.s21、所述自移动机器人侦测取样完成信号,并根据所述取样完成信号执行步骤s3,其中,所述取样完成信号为手持装置于巡线路径结束时接收的第二按键信号。所述第二按键信号可为使用者于巡线路径的拐点位置双击手持装置上的确认键而产生。
62.此外,也可通过自移动机器人自动判断是否完成取样,s2与步骤s3之间还包括以下步骤:自移动机器人判断首、尾记录点之间的直线距离是否小于第一预设距离阈值,若是,执行步骤s3;若否,返回执行步骤s1。
63.所述第一预设距离阈值为一距离常数值,其大小可以根据需要具体设定,当工作区域的面积较大时,其数值也可设定较大,当其数值较小时,其数值也可设定较小;当然,无论工作区域的面积大小,其数值较小时,其获得的结果更加精准。例如:本发明一具体示例中,可将该第一距离阈值设定为0.3m。
64.请参阅图7所示,在本发明的另一个实施例中,所述步骤s4具体包括以下步骤:
65.s41、分别获取每个记录点组的重心点;这里的重心点是指将记录点组中的每个点看做质点后,这个质点系的重心点,也即到记录点组中的每个点的距离的平方和最小的点为该记录点组的重心点。
66.s42、分别获取每个记录点组对应所述重心点的切线和法线,所述切线为当前记录点组包含的所有记录点通过最小二乘法拟合所得到的直线,所述法线为经过所述重心点且垂直于当前切线的直线;
67.s43、分别获取每个基础坐标点对应的m个偏心率,所述偏心率表示基础坐标点与其对应的每个重心点的偏离程度;
68.所述偏心率表示为:a、b分别表示当前基础坐标点与切线、法线之间的距离;
69.s44、获取当前基础坐标点对应的m个偏心率中的最大偏心率,以最大偏心率对应的重心点作为当前基础坐标点对应的边界拟合点。
70.作为一个特例,当m=1时,步骤s4仅包括:s41’、分别获取每个记录点组的重心点;s42’、以该重心点作为当前基础坐标点对应的边界拟合点。
71.为了便于理解,描述一具体示例供参考;假设预定圈数为5圈,每圈涉及的记录点均为10个,则存储于第一存储链表的记录点、即基础坐标点为100个,其分别为p1、p2、
……
、p100,存储于第二存储链表的记录点为400个;m的取值为20,为保证对应于每个基础坐标点的m个记录点组中的每个记录点组包含的记录点数目依次递增,则设定20个记录点组包括的与第一存储链表中当前选取基础坐标点距离最近的记录点依次为n,n 1,
……
,n (m-1),假设n取值为15,则第1个记录点组包含的记录点依次表示为p21、p22、
……
、p215,第 2个记录点组包含的记录点依次表示为p21、p22、
……
、p215、p216,第m个记录点组包含的记录点依次表示为p21、p22、
……
、p215、p216、
……
、p234。
72.通过以上内容可知:在第一存储链表中取p1作为基础坐标点,在第二存储链表中取距离p1最近的n个记录点p21、p22、
……
、p2n构成第一个记录点组,且n=15;通过重心点计算公式可获得第一个记录点组的重心坐标为p
emp1
(x
emp
1,y
emp1
),并进一步获得通过p
emp1
的切线和法线,所述切线为p21、 p22、
……
、p2n通过最小二乘法拟合所得到的直线,所述法线为经过所述重心点且垂直于当前切线的直线;进一步的,通过公式获得p1点对应的偏心率,a、b分别表示当前基础坐标点距离切线和距离法线的距离;进一步的,重复上述步骤,对于p1点分别对应的m个记录点组,分别获得对应于p1 的m个偏心率;并获得m个偏心率中的最大偏心率,以最大偏心率对应的重心点作为当前基础坐标点对应的边界拟合点;进一步的,根据每个基础坐标点对应的m个记录点组获取每个基础坐标点对应的边界拟合点,并将所述边界拟合点的集合形成边界拟合点序列。
73.请参阅图8所示,在本发明的另一个实施例中,所述步骤s5进一步包括以下步骤:
74.s51、判断边界拟合点序列中的任一边界拟合点与其相邻的两个边界拟合点是否共线,若是,则执行步骤s52;若否,则执行步骤s53;
75.s52、以当前边界拟合点为基础,并在通过当前边界拟合点的法线上等距偏移获取对应的边界点;将边界拟合点以及其相邻的两个边界拟合点生成圆;
76.s53、以当前边界拟合点为基础,并在通过当前边界拟合点与其所在圆的圆心连线上等距偏移获取对应的边界点。
77.若边界包括为外边界和内边界,所述步骤s5具体包括:以外边界对应的边界拟合点为基础,向外等距偏移获得对应的外边界点;以内边界对应的边界拟合点为基础,向内等距偏移获得对应的内边界点。
78.所述等距偏移表示每个边界点向外偏移或向内偏移的偏移值相同,本发明较佳实施方式中,当机器人为割草机器人时,所述偏移值通常不大于机器人上刀盘的直径。
79.可以理解的是,在本发明的具体实施方式中,若边界包括外边界和内边界,则采用上述方法对外边界和内边界分别进行处理;即通过对应外边界获得的记录点,获取外边界对应的外边界拟合点,在根据对应的外边界拟合点获取所需的外边界点;通过对应内边界获得的记录点,获取内边界对应的外边界拟合点,在根据对应的内边界拟合点获取所需的内边界点;当然,外边界点的获取和内边界点的获取可以交叉进行,在此不做详细赘述。进一步的,当边界包括外边界和内边界时,通常先处理外边界,再处理内边界,以避免重复工作,在此不做继续赘述。
80.为了便于理解,描述一具体示例供参考,如图9所示,对应于外边界获得的相邻的三个外边界拟合点分别为q0、q1、q2,其中,q1、q2分置于q0两侧,且三个外边界拟合点不共线,如此,以q0、q1、q2为同一圆上的三个坐标成圆,其圆心为c,则q0与圆心c的连线方向为偏移方向,进一步的,本实施方式中,由于三个边界拟合点对应于外边界,如此,在q0与圆心c的连线方向上向外偏移形成外边界点。
81.在本发明的另一个实施例中,在步骤s6之后,自移动机器人进一步对虚拟边界进行优化处理,所述优化处理包括在圆弧或圆上采用的点用拟合圆弧或圆替代,并取得优化后的虚拟边界。
82.请参阅图10所示,本发明还提供一种自移动机器人工作区域虚拟边界的生成系统,所述系统包括:
83.记录存储模块100,用于获取可移动的定位模块沿巡线路径环绕预定圈数的若干记录点,所述巡线路径为自移动机器人所在工作区域的边界形成的回路;所述预定圈数大于等于2;以及用于将行走第1圈对应的记录点存储于第一存储链表,将剩余的记录点存储于第二存储链表;
84.调取模块200,用于依次调取第一存储链表中的每一个记录点作为基础坐标点,并查询第二存储链表以依次选取对应每一基础坐标点的m个记录点组,每个记录点组包括与第一存储链表中当前选取的基础坐标点距离最近的多个记录点,且m个记录点组的记录点的数目依次递增;所述m为大于1的整数;
85.拟合模块300,用于根据每个基础坐标点及其对应的m个记录点组获取该基础坐标点的边界拟合点,并将多个所述边界拟合点的集合形成边界拟合点序列;
86.处理模块400,用于根据所述边界拟合点序列获得边界点,并用于将所述边界点依次连接生成工作区域的虚拟边界。
87.本发明又提供一种自移动机器人,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述自移动机器人工作区域虚拟边界的生成方法的步骤。
88.本发明又提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述自移动机器人工作区域虚拟边界的生成方法的步骤。
89.综上所述,本发明在自移动机器人进行边界学习的应用场景下,借由可移动的定位模块沿巡线路径环绕预定圈数以获取各个记录点的位置坐标,通过多次获取的记录点位置坐标自动校正以自动生成自移动机器人的虚拟边界;无需人工辅助输入相关参数,节省人力成本,提高工作效率。
90.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
91.上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。