1.本发明属于探测技术领域,具体涉及一种大视场小像差龙虾眼成像系统。
背景技术:
2.在目标告警、灾后搜救等工作场景中,对光学系统的探测视场范围、信道数量和成像分辨率都有着不懈提升的需求。光学系统可监视探测的视场范围越大,系统越可以尽早发现目标,为之后的防御措施或施救工作争取大量时间;光学系统的工作谱段越宽、成像分辨率越高,获得的目标信息量越大,越利于目标准确分类和识别,降低系统的虚警率,提高系统识别的准确度。但众所周知,光学系统的视场范围和成像分辨率是互为矛盾的关系,光学系统的工作谱段范围受到光学材料特性的限制,传统的设计方式难以使视场、工作谱段和成像分辨率三者兼得,通常会造成系统结构复杂、重量增大、成本提升等问题,不利于系统的实际生产和部署使用。传统方法实现多谱段大视场高分辨的光学系统设计并使系统轻量化是非常困难的。
3.在仿生系统设计方面,文章《超大视场变焦仿生光学系统设计》(doi:10.3788/irla201645.0818004)采用基于鱼眼镜头的技术方案,通过最前端鱼眼镜头实现了最大视场范围164度,后端通过改变透镜形状设计实现系统焦距变化,能满足大视场范围探测变分辨率成像,但由于镜头设计难度大、变焦距镜片结构受限,系统的焦距值较小,变焦放大倍率有限,系统分辨率限制了系统的工作距离只能在较近范围。
4.申请号201110310911.0的专利《龙虾眼红外侦察告警器》,该专利采用基于龙虾眼透镜的红外光波段侦察方案,通过龙虾眼收集红外目标辐射能量,并由焦面位置的非制冷红外球面探测器接收。但该系统工作谱段单一,仅在红外波段内工作,对于可见光目标无响应,且球面探测器加工难度大,制造成本高昂,以国内现有技术水平,难以推广实用。
技术实现要素:
5.有鉴于此,本发明的目的是提供一种大视场小像差龙虾眼成像系统,可实现在大视场范围内开展探测、告警工作,获取视场范围内关键目标的多谱段信息和高分辨图像,有效提高探测准确度,应用于目标告警、灾后搜救任务中具有显著优势和广阔前景。
6.一种龙虾眼成像系统,其中的物镜(1)采用龙虾眼结构,物镜(1)的每个小眼为四棱台;若干四棱台紧密布置,构成一个半球面;该半球面看作是由互相紧贴但不同半径的立体圆环构成,立体圆环由多个所述四棱台绕一圈形成;从物镜(1)最外围的一圈四棱台到中心的一圈四棱台,四棱台侧面的夹角逐渐减小,各圈四棱台的像面为同一平面。
7.进一步的,还包括基于二维范德华异质pn结的多波段的探测器(3),用于对所述像面的光线进行多谱段成像。
8.进一步的,还包括信息处理与调控系统(4)以及位姿调整机构(5);信息处理与调控系统(4)对探测器(3)获取的图像进行处理,对目标进行初定位,并向位姿调整机构(5)发出控制信号;同时对探测器(3)获取的图像进行分析识别,给出目标判别信息;
9.所述位姿调整机构(5)目标初步定位信息,调整物镜(1)和探测器(3)转动方向,使成像系统中心与目标对准。
10.较佳的,所述四棱台的内壁面形为自由曲面。
11.一种龙虾眼成像系统,其中的物镜(1)采用龙虾眼结构,还包括中继镜组(2);物镜(1)的中心位置为谐衍射镜片,谐衍射镜片的周围为由若干小眼紧密布置构成的一个半球面;每个小眼为四棱台;该半球面看作是由互相紧贴但不同半径的立体圆环构成,立体圆环由多个所述四棱台绕一圈形成;从物镜(1)最外围的一圈四棱台到中心的一圈四棱台,四棱台侧面的夹角逐渐减小,各圈四棱台的像面为同一平面;
12.中继镜组(2)用于将谐衍射镜片出射的光线汇聚到所述像面上。
13.进一步的,还包括基于二维范德华异质pn结的多波段的探测器(3),用于对所述像面的光线进行多谱段成像。
14.进一步的,还包括信息处理与调控系统(4)以及位姿调整机构(5);信息处理与调控系统(4)对探测器(3)获取的图像进行处理,对目标进行初定位,并向位姿调整机构(5)发出控制信号;同时对探测器(3)获取的图像进行分析识别,给出目标判别信息;
15.所述位姿调整机构(5)目标初步定位信息,调整物镜(1)和探测器(3)转动方向,使成像系统中心与目标对准。
16.较佳的,所述四棱台的内壁面形为自由曲面。
17.较佳的,谐衍射镜片的面型为普通衍射或者谐衍射。
18.较佳的,谐衍射镜片的层数为单层衍射面或多层衍射面。
19.本发明具有如下有益效果:
20.本发明提出的大视场小像差龙虾眼成像系统,物镜的每个小眼为微小四棱台,微小四棱台的内壁面形为自由曲面,镀有多谱段(可见光、短波红外、中长波红外)高反射率膜层;半球面形物镜可以看作是由互相紧贴但不同半径的立体圆环构成,立体圆环由多个微小四棱台绕一圈形成;从物镜最外围的一圈四棱台到中心的一圈四棱台,小四棱台近球心侧的边长相等,四棱台侧面的夹角逐渐减小,由此可使得物镜的焦距具有一定变化,越靠近中心的微通道焦距越长;由于微通道的焦距变化,物镜在距离为r处的像面是平面而非球面,实现了在大视场范围内对目标的高分辨、多谱段(可见光、短波红外、中长波红外)平面成像,解决系统工作谱段受光学材料限制的问题,有效消除了传统龙虾眼结构成像不可避免的大场曲,减小了系统像差,提高像面能量均匀性,能够有效压缩系统尺寸重量,具有明显提升系统工作能力、实现应用部署的效果;
21.将物镜中心位置替换为谐衍射镜片,谐衍射镜片在可见光及红外波段范围内的一系列特定谐波长处具有百分之百衍射效率,物镜与中继镜组组合,进一步增加中心区域的焦距,由于物镜中心的焦距值远大于物镜最外围的焦距值,像面中心区域的成像分辨率远高于像面外围区域的成像分辨率,可以在可见光及红外波段实现中心视场的高衍射效率、高分辨成像;
22.通过对获得图像的信息处理与信息提取,调控位姿调整机构,使镜组整体可在三维方向旋转扫描,捕获多角度图像,具有极大的探测视场范围;
23.对比已有技术,本发明提出的大视场小像差龙虾眼成像系统,能够解决光学系统大视场探测与高分辨成像的根本矛盾。通过对系统面形、结构、工作模式等方面的优化设
计,使系统具有诸多有益效果:大视场半球物镜结构与多角度扫描探测,进一步扩大系统探测视场范围;打破系统工作谱段受光学材料限制的问题,实现多谱段(可见光、短波红外、中长波红外)成像;消除传统龙虾眼结构的大场曲,减小龙虾眼成像系统的像差,提高像面照度均匀性;使用新型轻量化结构,压缩系统尺寸重量,提高系统便携性与机动性,利于实际应用部署。
附图说明
24.图1(a)为物镜的前视图,图1(b)为物镜的剖视图。
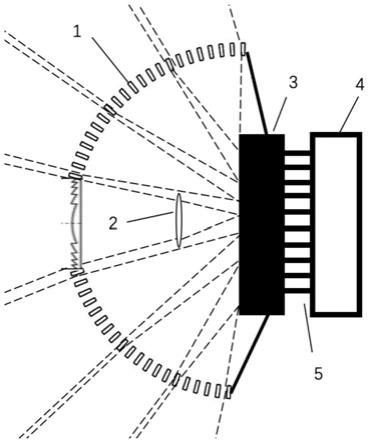
25.图2为本发明实施方式的光学系统及光路图。
[0026]1‑
物镜,2
‑
中继镜组,3
‑
探测器,4
‑
信息处理与调控系统,5
‑
位姿调整机构。
[0027]
图3为物镜小眼角度变化示意图。
具体实施方式
[0028]
下面结合附图并举实施例,对本发明进行详细描述。
[0029]
实施例1:
[0030]
一种大视场小像差龙虾眼成像系统,如图2所示,包括:物镜1、探测器3、信息处理与调控系统4以及位姿调整机构5。
[0031]
本发明的目标探测系统的物镜1采用龙虾眼结构,如图1(a)所示,物镜1的每个小眼为微小四棱台;若干微小四棱台紧密布置,构成一个半球面;如图1(b)所示,该半球面可以看作是由互相紧贴但不同半径的立体圆环构成,立体圆环由多个微小四棱台绕一圈形成;圆环为立体球面的局部而非平面结构,立体球面曲率半径为r。
[0032]
四棱台为上、下端面开口的中空结构,构成光线传播的微通道;光线从外侧端开口进入到四棱台内部,经过内壁反射面反射,从内侧端面出射,由探测器3接收。从物镜1最外围的一圈四棱台到中心的一圈四棱台,四棱台侧面的夹角(相邻两边的夹角)逐渐减小,由此可使得物镜1的焦距具有一定变化,越靠近中心的微通道焦距越长。由于微通道的焦距变化,物镜1在距离为r处的像面是平面而非球面。小眼的内壁面形为优化设计的自由曲面反射面,通过校正像差提高成像质量与光能利用率,使成像更加清晰并增强对比度。物镜1的特殊设计实现了在大视场范围内对目标的高分辨、多谱段(可见光、短波红外、中长波红外)平面成像。
[0033]
探测器3是基于二维范德华异质pn结的多波段探测器,可对可见光及红外光进行成像,将目标辐射光转换为图像信息。
[0034]
信息处理与调控系统4对多谱段探测器3获取的图像进行处理,对目标进行初定位,并向位姿调整机构5发出控制信号。对多谱段探测器3获取的图像进行分析识别,给出目标判别信息。
[0035]
位姿调整机构5包括若干大行程制动器,制动器与成像系统连接,根据信息处理与调控系统4的信号,通过施加不同大小的电压,控制制动器运动,带动物镜1和探测器3转动方向,使系统中心与目标对准,便于对目标进行高分辨成像。
[0036]
将小眼的内壁面形为优化设计的自由曲面反射面,用于校正像差提高成像质量,提高光能利用率。
[0037]
实施例2:
[0038]
一种大视场小像差龙虾眼成像系统,包括:仿生衍射物镜1、中继镜组2、探测器3、信息处理与调控系统4以及位姿调整机构5。
[0039]
在实施例1的基础上,物镜中心位置的区域替换为单层或多层的谐衍射镜片结构,构成仿生衍射物镜,谐衍射面型通过利用光的不同级次,可使可见光、红外波段中部分谐振波长光的焦距相同,并且具有较高的衍射效率,使可见光、红外波段的轴向色差得到校正。然后传递至中继镜组2,使目标的辐射光最终汇聚于像面上一点。仿生衍射物镜1非中心位置的区域,多谱段光线在小眼内壁发生反射,由于仿生衍射物镜1中心的焦距值远大于仿生衍射物镜1最外围的焦距值,可以在可见光及红外波段实现中心视场的高衍射效率高分辨成像。
[0040]
仿生衍射物镜1中心的衍射面型加工在薄膜材料上,相较于同等口径下的传统透镜,仿生衍射物镜更加轻薄,仿生衍射物镜1的外围微通道壁厚仅为毫米级,仿生衍射物镜1的中心厚度可达微米量级,其重量几乎可忽略,加工公差也更加宽松,利于实现系统的轻量化与小型化。相较于传统物镜,仿生衍射物镜的工作谱段为多谱段(可见光及红外三波段),且具有兼顾大视场与高分辨、轻量化、大口径、加工精度要求较低、系统成本低等优点。
[0041]
中继镜组2由若干透镜组成,压缩通过物镜1中心区域的谐衍射镜片的光线长度,使仿生衍射物镜1的中心谐衍射区域焦面与外围各圈微通道的焦面共面。
[0042]
多谱段探测器3、信息处理与调控系统4以及位姿调整机构5与实施例1相同。
[0043]
本发明的目标探测系统的工作运行过程为:
[0044]
系统工作的基本模式是物镜1外围大视场多谱段高灵敏度探测,中心局部视场高分辨成像。当目标进入系统的探测视场范围,首先目标辐射的光线被物镜1接收,经过物镜1外围微通道结构的光线,像差得到校正,光能利用率得到提升,被聚焦成像到多谱段平面探测器3上,获得目标的多谱段图像,提供目标的方位探测图。信息处理与调控系统4对图像中的目标像进行分析,解算出目标位置,并向位姿调整机构5施加控制信号,改变制动器的行程,使光学系统光轴方向与目标预测位置一致。此时目标辐射的光线被物镜1再次接收,经过中继镜组2后在探测器3上成像,获得目标的多谱段高分辨图像。根据目标的多谱段方位图像和多谱段高分辨图像,由信息处理与调控系统对目标进行识别。
[0045]
当本目标探测系统应用于目标告警情境时,告警系统的静态视场范围为170度。常规状态下,信息处理与调控系统4对位姿调整机构5施加规律变化的电压,使位姿调整机构5制动器行程改变,带动告警系统进行二维扫描,此时告警系统的视场范围可达到180度以上,这是目前传统透镜系统难以达到的。
[0046]
一旦飞行器目标进入系统的大视场告警范围内,目标光源发出的光首先在物镜1的外围小通道内壁发生反射,被物镜1汇聚调制,聚焦至r处的平面上,在多谱段探测器3上成像。由于目标为多谱段成像,系统对可见、红外特性均敏感,大大提升了系统发现目标的能力。根据目标图像在整幅图像上的位置,由信息处理与调控系统4分析得到目标方位信息,通过对位姿调整机构5施加电信号,控制位姿调整机构5的制动器运动,从而控制告警系统朝向,使系统中心轴与目标方位大致相同。此时,目标光源发出的光再次被物镜1中心的谐衍射面汇聚至中继镜组2,并被传递到多谱段探测器3上进行成像,获得目标的高分辨多谱段图像。至此,获得目标的多谱段较低分辨像和高分辨像。信息处理与调控系统据此分析
目标特性与特征,进行目标识别判别,给出预警信号或非关键目标信号。
[0047]
本系统的应用情境可以是灾后搜救,探测被掩埋目标。系统光学参数可以不同。物镜1的面形可以不同,包括外围微通道的形状、排布方式、谐衍射面型及层数可以不同,可为普通衍射、谐衍射,可为单层衍射面或多层衍射面等。多谱段探测器3的材质可以不同。
[0048]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

