1.本发明涉及一种一种微小型水下机器人的电磁弹射装置,具体地说是一种基于电磁弹射的可以对微小型机器人进行连续和0
‑
90度多角度弹射的装置,使微小型机器人离开弹射筒时具有一定的初速度。
背景技术:
2.本发明是一种弹射装置,弹射射物体为一种低成本的微小型机器人平台,利用uuv作为载体,在水下隐蔽或航行中针对目标物弹射出多个微小型机器人。该机器人具有磁力吸附能力,可吸附至目标舰船的底部。微小型机器人上搭配微小型化的装备,可以实现对船体的腐蚀、损伤等,降低目标舰船的战备能力,提高舰船的维护成本。从原理上看,类似于舰炮弹射和鱼雷弹射。
3.现有的鱼雷发射有多种动力发射方式,由于潜器和鱼雷尺寸的限制,没有连续大量发射的供弹装置;对于舰炮发射,炮弹多采用热发射,弹的存储有箱式存储、链式弹夹和圆形轮毂,在供给中有通过拨弹器传动弹链,有采用类似多角度机器人进行供给。
4.本发明包含从微小型机器人的存储到微小型机器人的供给和电磁弹射,实现连续和0
‑
90度多角度弹射。
技术实现要素:
5.本发明的目的是为了本发明的主要目的在于设计一种弹射装置,弹射装置可以存储一定量的微型机器人,在工作时可以进行连续和多角度弹射,弹射装置安全可靠且稳定。
6.本发明的目的是这样实现的:包括微型机器人存储仓、供给机构和电磁弹射,微型机器人存储仓部分包括由支撑柱连接的存储仓上板和存储仓下板、设置在存储仓上板和存储仓下板之间的链传动机构、等间距设置在链传动机构的链条上的存储筒、设置在存储仓下板上的推出液压缸、设置在存储仓下板的驱动链传动机构的动力电机;供给机构包括设置在存储仓上板上的支架、转运筒、弹射筒、摆角液压缸、伸缩液压缸和进给液压缸,转运筒与两转接件通过螺栓连接,两转接件与两伸缩液压缸的液压杆通过螺母与液压杆螺纹配合进行连接;两摆角液压缸对称安装且缸底与支架上的耳铰连接、液压杆杆头与伸缩液压缸进行铰连接;伸缩液压缸缸底与支架铰接;进给液压缸直接固定在弹射筒上;电磁弹射采用线圈电磁弹射方式,包括驱动线圈、电枢和导磁壳体,角度调整液压缸缸底与存储仓上板铰接、杆头与弹射筒铰接。
7.本发明还包括这样一些结构特征:
8.1.存储筒底部安装滚珠,与存储仓下板的导向槽配合,存储筒侧边装有板簧,在存储筒下部装有对存储筒的位置检测的传感器。
9.2.转运筒上设置有微型气缸,微型气缸的缸杆与连接件一通过销轴进行铰连接,连接件一与连接件二通过销轴进行铰连接,连接件二端部孔与卡爪端部的槽孔通过销轴连接,卡爪中部转动孔与转运筒上的固定耳通过销轴进行铰连接,实现卡爪的夹紧与松开,转
运筒底部装有限位机构。
10.3.工作过程中,首先供给系统准备,微型机器人存储仓开始工作,链传动机构运动,存储筒随链运动,检测微型机器人存储仓是否在指定位置;微型机器人存储仓到指定位置,推出机构开始工作,推动液压缸使微型机器人从存储仓的存储筒运动到转运筒,转运筒抱紧微型机器人;供给机构开始工作,摆角液压缸运动,使转运筒运动到和弹射筒同一轴线;伸缩液压缸使转运筒靠近弹射筒;进给液压缸开始工作,使微型机器人从弹射筒运动到弹射筒中;电磁弹射开始工作,驱动线圈供电,电枢带动微型机器人运动,实现弹射;在推出液压缸收回后,存储仓开始下一次弹射工作,电机工作,链条运动,下一个微型机器人运动到指定位置等待;进给液压缸完成一次进给后,恢复初始位置等待下一次弹射,然后供给机构中伸缩液压缸和摆角液压缸工作,使转运筒恢复到初始位置,进行下次弹射;同理进行连续弹射。
11.与现有技术相比,本发明的有益效果是:本发明结构简单,容易实现。通过角度调整液压缸和供给机构可以实现连续和0
‑
90度弹射,弹射的灵活性,攻击范围和攻击火力有很大提升。存储仓采用典型的链传动,在一定的空间范围内可以存储多个微型机器人;储存筒的保护设计,对微型机器人有良好的保护,并且在运动过程中更加稳定可靠。供给机构通过两液压缸实现转运筒两自由度的运动,简单可靠,容易实现;转运筒通过卡爪和限位使微型机器人在转运过程中更加安全、稳定可靠。电磁弹射可以根据射速的要求调整激发电压,实现速度的控制,使弹射更加灵活可靠。
12.存储筒上下连接块与链传动的外链节固定连接,使存储筒与链条随动。存储筒底部安装滚珠,与存储仓下板的导向槽配合,有支撑和导向的作用。存储筒侧边装有板簧,微型机器人与存储筒为间隙配合,在工作运动中,两者会发生碰撞,板簧可以有效的减小振动和碰撞,对微型机器人夹紧。在存储筒下部装有传感器,实现对存储筒的位置检测。存储筒安全可靠,对微型机器人有很好的存储和保护。
13.转运筒包含圆柱筒体、夹紧卡爪和底部限位三部分。夹紧卡爪可实现对微型机器人的抱紧,它由一个微型气缸、连接件和卡爪组成,通过气缸的伸缩转化为卡爪的夹紧和松开。底部限位装置为连接弹簧的楔形块,随着微型机器人的进入,弹簧压缩,楔形块向外运动,到达底部时,楔形块在弹簧的作用下,向里运动,实现自锁。转运筒实现对微型机器人从存储仓到弹射筒的转运,工作过程中要保证安全可靠。
14.转运机构由摆动液压缸和伸缩液压缸组成,相当于两自由度的机械手。结构简单,实现微小型机器人的转运。
附图说明
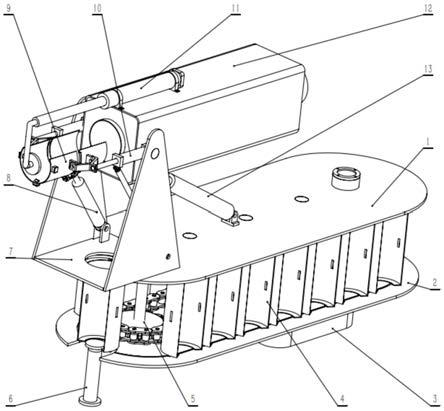
15.图1是电磁弹射装置的整体结构示意图;
16.图2是存储仓的整体结构示意图;
17.图3a
‑
b均是供给机构的整体结构示意图;
18.图4是电磁弹射示意图;
19.图5是存储筒结构示意图;
20.图6a
‑
b均是转运筒结构示意图;
21.图7是限位机构示意图;
22.图8是微型机器人示意图。
23.图中:1.存储仓上板,2.存储仓下板,3.动力电机,4.存储筒,5.链传动机构,6.推出液压缸,7.支架,8.摆角液压缸,9.转运筒,10.伸缩液压缸,11.进给液压缸,12.电磁弹射机构,13.角度调整液压缸,14.链条,15.链轮,16.导向槽,17.轴承盖,18.存储仓上下板支撑柱,19.弹射筒,20.线圈,21.导磁壳体,22.弹射筒封装,23.存储筒筒身,24.上下连接块,25.滚珠,26.板簧,27.转接件,28.连接件1,29.微型气缸,30.卡爪连接耳,31.转接件连接耳,32.卡爪,33.连接件2,34.限位机构,35.限位连接板,36.弹簧,37.楔形块,38.微型机器人(外部有可张开的吸附爪),39.电枢。
具体实施方式
24.下面结合附图与具体实施方式对本发明作进一步详细描述。
25.本发明主要由微型机器人存储仓(图2)、供给机构(图3a
‑
b)和电磁弹射(图4)三部分组成。微型机器人存储仓部分包括链传动机构5(链条14、链轮15)、存储筒4、推出液压缸6、存储仓上板1、存储仓下板2和动力电机3。存储仓上下板1、2通过三个连接支撑柱18连接;两主动轮15同轴,两从动轮同轴,轴两端通过轴承安装在存储仓上下板上,最后通过轴承盖17密封锁紧;两链条14与两组链轮分别上下配合,链条外链节有凸出的连接块;存储筒上下连接块24与上下两外链节通过螺栓连接;推出液压缸6直接固定在指定位置。
26.供给机构包括转运筒9、摆动液压缸8、伸缩液压缸10、进给液压缸11和支架7。转运筒9与两转接件27通过螺栓连接,两转接件27与两伸缩液压缸10的液压杆通过螺母与液压杆螺纹配合进行连接;两摆角液压缸8对称安装,缸底与支架7上的耳铰连接,液压杆杆头与伸缩液压缸10进行铰连接;伸缩液压缸10缸底与支架7进行铰连接,转动轴与电磁弹射筒的转动轴同轴;进给液压缸11直接固定在弹射筒上。
27.电磁弹射采用线圈电磁弹射方式,包括驱动线圈20、弹射筒19、角度调整液压缸13、导磁壳体21和弹射筒封装22。角度调整液压缸13缸底与存储仓上板1通过销轴进行铰连接,杆头与弹射筒也通过销轴进行铰连接。存储筒4底部可安装滚珠25,有支撑和导向作用,侧边安装板簧26,对微型机器人(图8所示,包括微型机器人38和电枢39)有夹紧减振作用;转运筒装有微型气缸29,气缸固定在转运筒上,缸杆与连接件一28通过销轴进行铰连接,连接件一28与连接件二33通过销轴进行铰连接,连接件二33端部孔与卡爪32端部的槽孔通过销轴连接,卡爪中部转动孔与转运筒上的固定耳30通过销轴进行铰连接,实现卡爪的夹紧与松开,转运筒底部装有限位机构34。转运筒可实现对微型机器人的抱紧和底部限位。
28.工作过程中,首先角度调整液压缸13工作,通过液压缸的伸缩,实现弹射角度的调整;微型机器人存储仓开始工作,动力电机3输出,链轮15转动,链条14运行,存储筒随链运动,存储筒运动到指定位置,电机停止输出;微型机器人存储仓到指定位置,推出液压缸6开始工作,推动液压缸使微型机器人从存储仓的存储筒4运动到转运筒9,转运筒抱紧微型机器人;供给机构开始工作,摆角液压缸8运动,使转运筒9运动到和弹射筒19同一轴线,伸缩液压缸10使转运筒靠近弹射筒,进给液压缸11开始工作,使微型机器人从转运筒9运动到弹射筒19中;电磁弹射开始工作,驱动线圈20供电,电枢带动微型机器人运动,实现第一次弹射。在推出液压缸6收回后,存储仓开始下一次弹射工作,电机3工作,链条14运动,下一个微型机器人运动到指定位置等待;进给液压缸11完成一次进给后,恢复初始位置等待下一次
弹射,然后供给机构中伸缩液压缸10和摆角液压缸8工作,使转运筒9恢复到初始位置,进行下次弹射。同理进行连续弹射。
29.结合图2,存储仓由存储仓上板1、存储仓下板2、动力电机3、存储筒4、推出液压缸6、链条14、链轮15、导向槽16、轴承盖17和存储仓上下板支撑柱18组成。工作时,动力电机3输出,链轮15转动,链条14运行,存储筒随链运动,存储筒运动到指定位置,电机停止输出;微型机器人存储仓到指定位置,推出液压缸6开始工作,推动液压缸使微型机器人从存储仓的存储筒4运动到转运筒9中。链传动有动载荷,产生振动和冲击,为减小影响,尽可能的链节距;设计时,在存储仓下板中有一条导向槽16,与存储筒上滚珠25配合,起到支撑和导向的作用,使运行更加稳定可靠。
30.结合图5,存储筒由存储筒筒身23、上下连接块24、滚珠25和板簧26组成。上下连接块24与链节连接,使存储筒与链条随动。滚珠25与导向槽16配合。微型机器人和存储筒是间隙配合,侧边两板簧26可以减少微型机器人与筒身23的碰撞,使运行稳定可靠。
31.结合图6a
‑
b、图7,存储筒由转接件27、连接件1 28、.微型气缸29、卡爪连接耳30、转接件连接耳31、卡爪32、连接件2 33和.限位机构34组成;限位机构由限位连接板35、弹簧36和楔形块37组成。工作时,微型机器人从存储筒4运动到转运筒9时,微型机器人头部接触到限位机构的楔形块37,楔形块37向外运动,弹簧36压缩,当微型机器人底部进入转运筒9时,36弹簧恢复,37楔形块向里运动,实现自锁,起到底部限位。同时,微型气缸29工作,通过连接件,卡爪32运动,实现张合,对微型机器人进行抱紧和松开,在转运过程中对微型机器人抱紧,使运行稳定可靠,在微型机器人从转运筒运动到弹射筒时,松开。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

