1.本技术涉及风电平台登乘装置技术领域,尤其涉及一种智能化海上辅助系泊及登乘装置及控制方法。
背景技术:
2.风电平台建于海洋之上,在这些设施需要建设维护时,工作人员需要坐船舶靠近设施后再通过登乘装置进入。目前,国内已建成的海上风电平台大多采用吊篮、直梯等登乘器具登乘。但这些器具危险性较高且造价昂贵。国内外一些相关方案已提出对运维船进行改造,如增加液压补偿驱动装置,带轨道移动斜梯等方式来减小登乘时的晃荡,但此类补偿方式在船舶停靠风电平台时仍受涌浪、风浪影响较大。容易导致工作人员使用舷梯登乘时不易站稳,出现安全事故。
技术实现要素:
3.本技术实施例的目的是提供一种智能化海上辅助系泊及登乘装置及控制方法,以解决相关技术中存在的船舶停靠风电平台时受涌浪、风浪影响较大,导致工作人员使用舷梯登乘时不易站稳,出现安全事故的技术问题。
4.根据本技术实施例的第一方面,提供一种智能化海上辅助系泊及登乘装置,包括:
5.消能组件,所述消能组件的内侧与船舶固接,外侧顶靠在风电平台的立柱上;
6.登乘装置,用于提供登乘从船舶登入到风电平台;
7.锁紧装置,所述锁紧装置包括锁链、锁匙棒、锁盘构件、绞盘、收放机构,所述锁盘构件在所述风电平台的立柱上,所述锁盘构件上具有锁芯,所述锁链的前端连有可插入所述锁芯的锁匙棒,后端连接在所述收放机构上,所述收放机构固定在所述船舶上;
8.信息采集装置,所述信息采集装置包括波浪传感器、风速传感器和位移传感器;
9.控制单元,所述控制单元用于接收所述信息采集装置采集的信号、用于控制所述收放机构的收放量、用于控制所述登乘装置的登船角度。
10.可选的,所述消能组件采用消能滑轮组。
11.可选的,所述登乘装置包括角度调控装置、第一消能缸、第二消能缸、登乘舷梯、卡扣,所述角度调控装置固定在所述船舶的甲板上,所述第一消能缸的一端固定在所述角度调控装置上,另一端固定在所述登乘舷梯的一端,所述登乘舷梯的另一端通过第二消能缸与卡扣相连。
12.可选的,所述锁芯中开有供所述锁匙棒通过的孔,所述锁匙棒穿过所述孔并旋转预定角度后卡紧在所述锁芯的端面上。
13.可选的,所述锁盘构件由两个半圆形钢质固件通过螺栓固定连接而成。
14.可选的,其中一个所述半圆形钢质固件上具有所述锁芯。
15.根据本发明实施例的第二方面,提供一种智能化海上辅助系泊及登乘装置的控制方法,该方法包括以下步骤:
16.(1),利用所述风速传感器测得的风速数据风速v1,根据风向分解风速为横向风速v
1x
与纵向风速v
1y
,利用所述波浪传感器测得波高h、波速v2、及波浪方向与船体的夹角θ,利用所述位移传感器测得船体各部分位移高度,计算船舶船首抬高h’:
17.h'=η1h1 η2h2 η3h3 η4h4ꢀꢀ
(1)
18.式中,h’为船舶船首抬高,h1、h2、h3、h4分别为克服风力、水流力、波浪力和自重影响所需要抬高的基础值,其中风速系数水流系数波浪系数自重系数η4,式中l为船长,将各项系数代入公式(1)可求得船舶船首应抬高高度h’;
19.(2),根据所述风速传感器测得的风速数据风速v1,根据风向分解风速为v
1x
与v
1y
及已知系数a
xw
、a
yw
、δ,其中,a
xw
为船舶横向受风面积,a
yw
为船舶纵向受风面积,δ为风压不均匀折减系数,计算得到风荷载对锁链力的大小影响为f1;
20.通过风荷载对锁链力影响计算公式(2)和(3),计算风荷载对锁链力的大小影响为f1;
21.f
x1
=73
×
10
‑5a
xw
v
1x2
δ(n)
ꢀꢀ
(2)
22.f
y1
=49
×
10
‑5a
yw
v
1y2
δ(n)
ꢀꢀ
(3)
[0023][0024]
式中f
x1
为水平于船体的风载受力,f
y1
为垂直于船体的风载受力,a
xw
为船舶横向受风面积,a
yw
为船舶纵向受风面积,v
1x
为横向风速,v
1y
为纵向风速,δ为风压不均匀折减系数;
[0025]
(3),根据所述波浪传感器测得的水流力大小f,根据所述波浪传感器测得的波速v2以及已知系数c
xsc
、c
xmc
、c
yc,
计算得到水流力对锁链力大小影响为f2;
[0026]
通过水流对锁链力影响计算公式(4)(6),计算水流力对锁链力大小影响为f2;
[0027]
f
xsc
=c
xsc
×
ρ/2
×
v
22
×
b
ꢀꢀ
(4)
[0028]
f
xmc
=c
xmc
×
ρ/2
×
v
22
×
b
ꢀꢀ
(5)
[0029]
f
yc
=c
yc
×
ρ/2
×
v
22
×
s
ꢀꢀ
(6)
[0030][0031]
式中f
xsc
为船首受水流力的横向分力,f
xmc
为船尾受水流力的横向分力,f
yc
为船舶受水流力的纵向分力,c
xsc
为水流力船首横向分项系数,c
xmc
为水流力船尾横向分项系数,c
yc
为水流力纵向分项系数,v2为波速,b为船舶吃水以下的横向投影面面积,s为船舶吃水以下的表面面积;
[0032]
(4),根据所述波浪传感器测得的波浪高度h、波向角θ及已知船体长度l计算得到波浪荷载对锁链力的影响为f3;
[0033]
通过波浪力计算公式(7)(8),计算得到波浪荷载对锁链力的影响f3;
[0034]
[0035][0036][0037]
式中f
x3
为船舶受波浪力横向分力,f
y3
为船舶受波浪力纵向分力,θ为波向角,l为船长,h为波浪高度,d为船舶吃水,τ1、τ2为综合系数,a
x
为反应船舶横摇与波浪周期关系的参数,a
y
为反应船舶纵摇与波浪周期关系的参数;
[0038]
(5),根据所述位移传感器测得的船头位移高度h’,进行迭代计算得到克服船首自重荷载的对锁链力大小影响为f4;
[0039]
通过克服船首自重荷载的提升力计算公式(9),计算得到克服船首自重荷载的对锁链力大小影响为f4;
[0040][0041]
式中f
滑
为消能滑轮对船舶的反作用力,v排为船舶排开水的体积,ρ
水
为海水密度;
[0042]
根据上述计算所得的f1、f2、f3和f4,可求出系泊力f;
[0043]
f=f1 f2 f3 f4ꢀꢀ
(10)
[0044]
通过步骤(2)—(5)计算得到船舶船首抬高h’时锁链所需拉力f,再利用收放机构拉动锁链,完成船首抬高。
[0045]
本技术的实施例提供的技术方案可以包括以下有益效果:
[0046]
由上述实施例可知,本技术实施例提供过的智能化海上辅助系泊及登乘装置包括锁链、锁匙棒、锁盘构件、绞盘、收放机构设备、登乘装置和消能组件,所以克服了船舶停靠于风电平台时晃荡严重的问题,进而达到了使工作人员可以安全的登乘风电平台的技术效果,具有优秀的实际应用性。
[0047]
通过波浪传感器、风速传感器和位移传感器,可以实时监测波浪的波高、波向及风速,并通过控制单元处理找到船首在当前环境下应抬高的高度,所以克服了在风浪较大时,船舶无法安全工作的问题,进而达到了在较大风浪下,船舶也可保证安全工作的技术效果。
[0048]
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
[0049]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
[0050]
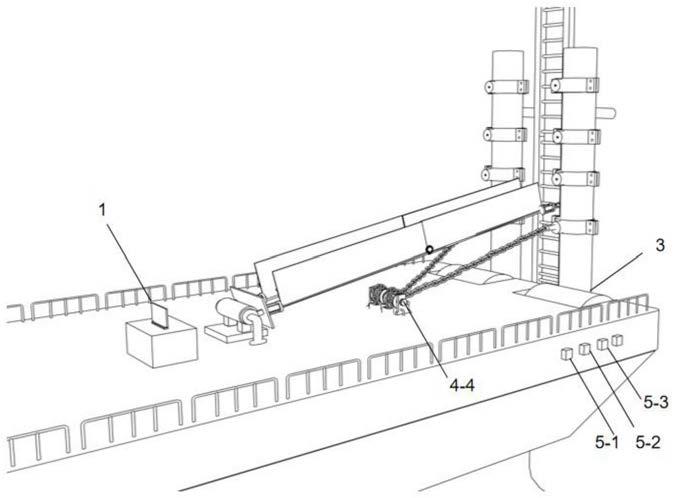
图1是根据一示例性实施例示出的智能化海上辅助系泊及登乘装置的结构示意图。
[0051]
图2是根据一示例性实施例示出的登乘舷梯的结构示意图。
[0052]
图3是根据一示例性实施例示出的锁盘构件安装于风电平台的框图。
[0053]
图4是根据一示例性实施例示出的锁盘构件外部结构示意图。
[0054]
图5是根据一示例性实施例示出的锁盘构件内部结构示意图。
[0055]
图中:1、控制单元;2
‑
1、角度调控装置;2
‑2‑
1、第一消能缸;2
‑2‑
2、第二消能缸;2
‑
3、登乘舷梯;2
‑
4、卡扣;3、消能滑轮;4
‑
1、锁链;4
‑
2、锁匙棒;4
‑
3、锁盘构件;4
‑
4、绞盘;5
‑
1、
波浪传感器;5
‑
2、风速传感器;5
‑
3、位移传感器。
具体实施方式
[0056]
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
[0057]
在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
[0058]
应当理解,尽管在本技术可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本技术范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
[0059]
参考图1
‑
图5,本发明实施例提供一种智能化海上辅助系泊及登乘装置,包括控制单元1、登乘装置2、消能组件3、锁紧装置4、信息采集装置,所述消能组件3的内侧与船舶固接,外侧顶靠在风电平台的立柱上;所述登乘装置2,用于提供登乘从船舶登入到风电平台;所述锁紧装置4包括锁链4
‑
1、锁匙棒4
‑
2、锁盘构件4
‑
3、绞盘4
‑
4、收放机构,所述锁盘构件4
‑
3在所述风电平台的立柱上,所述锁盘构件4
‑
3上具有锁芯,所述锁链4
‑
1的前端连有可插入所述锁芯的锁匙棒4
‑
2,后端连接在所述收放机构上,所述收放机构固定在所述船舶上;所述信息采集装置包括波浪传感器5
‑
1、风速传感器5
‑
2和位移传感器5
‑
3;所述控制单元1用于接收所述信息采集装置采集的信号、用于控制所述收放机构的收放量、用于控制所述登乘装置2的登船角度。
[0060]
本实施例中,所述消能组件3采用消能滑轮组,所述消能滑轮3固接在船首,抵靠于风电平台上下滑动。
[0061]
本实施例中,所述登乘装置包括角度调控装置2
‑
1、第一消能缸2
‑2‑
1、第二消能缸2
‑2‑
2、登乘舷梯2
‑
3、卡扣2
‑
4,所述角度调控装置2
‑
1固定在所述船舶的甲板上,所述第一消能缸2
‑2‑
1的一端固定在所述角度调控装置2
‑
1上,另一端固定在所述登乘舷梯2
‑
3的一端,所述登乘舷梯2
‑
3的另一端通过第二消能缸2
‑2‑
2与卡扣2
‑
4相连。
[0062]
所述第一消能缸2
‑2‑
1和第二消能缸2
‑2‑
2可以采用电动缸,可以受控于控制单元1,由控制单元1控制软硬度。
[0063]
上述登乘舷梯可以采用现有技术,可以伸缩长度。
[0064]
本实施例中,所述锁盘构件4
‑
3固定安装在风电平台的立柱上,由两个半圆形钢质固件通过螺栓固定连接而成,其中一个所述半圆形钢质固件上具有所述锁芯。
[0065]
本实施例中,所述锁芯中开有供所述锁匙棒4
‑
2通过的孔,所述锁匙棒4
‑
2穿过所述孔并旋转预定角度后卡紧在所述锁芯的端面上。旋转锁匙棒4
‑
2可将旋转锁匙棒4
‑
2从锁盘构件4
‑
3拔出。
[0066]
控制单元1通过波浪传感器5
‑
1、风速传感器5
‑
2、位移传感器5
‑
3等采集海上风浪资料,计算出最优登乘方案,紧接着通过消能组件中的消能滑轮3使运维船顶靠在风电平台上,通过角度调控装置2
‑
1将登船舷梯2
‑
3调节至最优登乘角度,再延展登船舷梯2
‑
3至风电平台附近并通过卡扣3
‑
1固定在风电平台上,再将锁链4
‑
1紧锁在锁盘构件4
‑
3上并利用绞盘4
‑
4抬高船首至一定高度,以降低不同波浪高度带来的不稳定性。当工作人员位于靠近船舶一侧时,第一消能缸2
‑2‑
1与甲板侧固接,与风电平台软接,当工作人员位于靠近风电平台一侧时,第二消能缸2
‑2‑
2与风电平台固接,与甲板侧软接。待工作人员结束工作并通过舷梯安全登上甲板后,控制单元1解开锁链4
‑
1,收回登船舷梯2
‑
3。该登乘风电平台的装置的工作稳定、方便和准确,可以降低登乘风险,让工作人员安全、快捷的登上风电平台。
[0067]
以上计算出最优登乘方案,即为下面要描述的控制方法。
[0068]
本发明实施例还提供一种智能化海上辅助系泊及登乘装置的控制方法,该方法包括以下步骤:
[0069]
(1),利用所述风速传感器5
‑
2测得的风速数据风速v1,根据风向分解风速为横向风速v
1x
与纵向风速v
1y
,利用所述波浪传感器测得波高h、波速v2、及波浪方向与船体的夹角θ,利用所述位移传感器测得船体各部分位移高度,计算船舶船首抬高h’:
[0070]
h'=η1h1 η2h2 η3h3 η4h4ꢀꢀ
(1)
[0071]
式中,h’为船舶船首抬高,h1、h2、h3、h4分别为克服风力、水流力、波浪力和自重影响所需要抬高的基础值,,基础值常取值为1m,其中风速系数水流系数波浪系数自重系数η4,η4常取0.5,式中l为船长,将各项系数代入公式(1)可求得船舶船首应抬高高度h’。以上均由信息采集装置测得的数据可以拟合计算得到。
[0072]
(2),根据所述风速传感器5
‑
2测得的风速数据风速v1,根据风向分解风速为v
1x
与v
1y
及已知系数a
xw
、a
yw
、δ,其中,a
xw
为船舶横向受风面积,a
yw
为船舶纵向受风面积,δ为风压不均匀折减系数,计算得到风荷载对锁链力的大小影响为f1;
[0073]
通过风荷载对锁链力影响计算公式(2)和(3),计算风荷载对锁链力的大小影响为f1;
[0074]
f
x1
=73
×
10
‑5a
xw
v
1x2
δ(n)
ꢀꢀ
(2)
[0075]
f
y1
=49
×
10
‑5a
yw
v
1y2
δ(n)
ꢀꢀ
(3)
[0076][0077]
式中f
x1
为水平于船体的风载受力,f
y1
为垂直于船体的风载受力,a
xw
为船舶横向受风面积,a
yw
为船舶纵向受风面积,v
1x
为横向风速,v
1y
为纵向风速,δ为风压不均匀折减系数;
[0078]
(3),根据所述波浪传感器5
‑
1测得的水流力大小f,根据所述波浪传感器测得的波速v2以及已知系数c
xsc
、c
xmc
、c
yc,
计算得到水流力对锁链力大小影响为f2;
[0079]
通过水流对锁链力影响计算公式(4)
‑
(6),计算水流力对锁链力大小影响为f2;
[0080]
f
xsc
=c
xsc
×
ρ/2
×
v
22
×
b
ꢀꢀ
(4)
[0081]
f
xmc
=c
xmc
×
ρ/2
×
v
22
×
b
ꢀꢀ
(5)
[0082]
f
yc
=c
yc
×
ρ/2
×
v
22
×
s
ꢀꢀ
(6)
[0083][0084]
式中f
xsc
为船首受水流力的横向分力,f
xmc
为船尾受水流力的横向分力,f
yc
为船舶受水流力的纵向分力,c
xsc
为水流力船首横向分项系数,c
xmc
为水流力船尾横向分项系数,c
yc
为水流力纵向分项系数,v2为波速,b为船舶吃水以下的横向投影面面积,s为船舶吃水以下的表面面积;
[0085]
(4),根据所述波浪传感器5
‑
1测得的波浪高度h、波向角θ及已知船体长度l计算得到波浪荷载对锁链力的影响为f3;
[0086]
通过波浪力计算公式(7)
‑
(8),计算得到波浪荷载对锁链力的影响f3;
[0087][0088][0089][0090]
式中f
x3
为船舶受波浪力横向分力,f
y3
为船舶受波浪力纵向分力,θ为波向角,l为船长,h为波浪高度,d为船舶吃水,τ1、τ2为综合系数,a
x
为反应船舶横摇与波浪周期关系的参数,a
y
为反应船舶纵摇与波浪周期关系的参数;
[0091]
(5),根据所述位移传感器5
‑
3测得的船头位移高度h’,进行迭代计算得到克服船首自重荷载的对锁链力大小影响为f4;
[0092]
通过克服船首自重荷载的提升力计算公式(9),计算得到克服船首自重荷载的对锁链力大小影响为f4;
[0093][0094]
式中f
滑
为消能滑轮对船舶的反作用力,v排为船舶排开水的体积,ρ
水
为海水密度;
[0095]
根据上述计算所得的f1、f2、f3和f4,可求出系泊力f;
[0096]
f=f1 f2 f3 f4ꢀꢀ
(10)
[0097]
通过步骤(2)—(5)计算得到船舶船首抬高h’时锁链所需拉力f,再利用收放机构拉动锁链,完成船首抬高。
[0098]
由上述实施例可知,本技术通过对风电平台进行进一步的改造,利用一种新型的智能化海上辅助系泊及登乘装置解决了工作人员登乘风电平台时不易站稳,容易发生倾倒的安全问题,让工作人员的人身安全有了保障。
[0099]
本领域技术人员在考虑说明书及实践这里公开的内容后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由下面的权利要求指出。
[0100]
应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并
且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

