1.本发明属于机械装置控制技术以及水翼船领域,涉及一种无极控制水翼倾斜角的方法及装置。
背景技术:
2.控制水翼船的水翼包括水翼的收缩与伸展以及水翼与水平面的倾斜角的控制。无论是控制水翼的收缩与伸展,还是控制水翼与水平面的倾斜角,最终目的都是实现整个船身的重心的调节,进而实现船体高速运行时候的升力调节。
3.水翼船领域中,控制水翼相对于水平面的倾斜角尤为重要,且控制角度的精度要求比较高。现有技术中,为了控制水翼与水平面的倾斜角而采用的技术方案中,主要问题在于:1.精度不高;2.大多水翼船只能在静止状态下调节水翼相对于水平面的倾斜角。
4.题为《一种控制水翼倾斜角的方法及装置》、申请号为2021103405692的发明申请所提供的技术方案中,公开了利用电动推杆来控制水翼与水平面的倾斜角,该技术方案虽然具有价格低廉、稳定可靠、运行安全的有益效果,但精度不高,只能达到0.2度,并且只能在水翼船静止状态下调节倾斜角,因此,无法在水翼船运行过程中调节水翼相对于水平面的倾斜角。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种无极控制水翼倾斜角的方法,通过微型减速步进电机结合增量式编码器,在控制微型减速步进电机运行过程中实时获取电机转动角度,水翼船运行过程中通过伺服控制算法精准地控制水翼相对于水平面的倾斜角,其精度能够达到0.08度。因此,本发明具有控制精度高、稳定可靠、运行安全且能够在水翼船运行过程中调节倾斜角的有益效果。
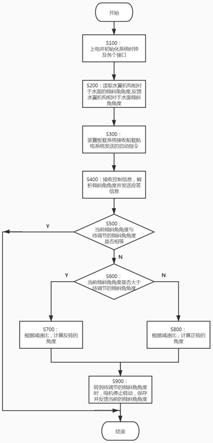
6.本发明申请包括以下步骤:
7.s100:水翼机构的无极控制装置上电并初始化系统时钟及各个接口,其中,
8.所述无极控制装置包括装置板载系统、微型减速步进电机及增量式编码器,所述接口包括rs485接口、电机接口、编码器接口及外部存储器接口;
9.s200:装置板载系统读取外部存储器所存储的水翼机构相对于水面的倾斜角角度,所述无极控制装置向船载航电系统反馈水翼机构相对于水面倾斜角角度,用以向船载航电系统输入当前水翼机构状态;
10.s300:装置板载系统接收船载航电系统发送的启动指令,激活所述无极控制装置中水翼机构相对于水面倾斜角的无极控制功能;
11.s400:装置板载系统接收船载航电系统发送的控制信息,解析控制信息所包含的待调节的倾斜角角度并向船载航电系统发送收到控制信息后的应答信息;
12.s500:判断当前倾斜角角度与待调节的倾斜角角度是否相等,如果是,结束流程,否则,执行步骤s600;
13.s600:判断当前倾斜角角度是否大于待调节的倾斜角角度,如果是,执行步骤s700,否则,执行步骤s800;
14.s700:根据微型减速步进电机的减速比,计算水翼机构调节到待调节的倾斜角角度时微型减速步进电机所需反转的角度,其中,微型减速步进电机反转用以减小水翼机构相对于水面的倾斜角角度,执行步骤s900;
15.s800:根据微型减速步进电机的减速比,计算水翼机构调节到待调节的倾斜角角度时微型减速步进电机所需正转的角度,其中,微型减速步进电机正转用以增大水翼机构相对于水面的倾斜角角度;
16.s900:当装置板载系统控制微型减速步进电机转到待调节的倾斜角角度时,微型减速步进电机停止转动,向外部存储器保存当前的倾斜角角度并通过rs485接口向船载航电系统反馈当前的倾斜角角度。
17.优选地,所述微型减速步进电机包括第一微型减速步进电机及第二微型减速步进电机。
18.优选地,所述增量式编码器包括第一增量式编码器及第二增量式编码器。
19.优选地,第一增量式编码器机械连接至第一微型减速步进电机、电连接至装置板载系统并实时向装置板载系统反馈第一微型减速步进电机转动的角度;第二增量式编码器机械连接至第二微型减速步进电机、电连接至装置板载系统并实时向装置板载系统反馈第二微型减速步进电机转动的角度。
20.优选地,装置板载系统根据第一增量式编码器及第二增量式编码器所反馈的角度各自分别对第一微型减速步进电机及第二微型减速步进电机进行伺服控制。
21.优选地,所述伺服控制包括采用pid算法各自分别对第一微型减速步进电机及第二微型减速步进电机位置环及速度环的双环控制,其中,位置环作为外环,速度环作为内环,位置环的输出作为速度环的输入,速度环的输出作为控制第一微型减速步进电机及第二微型减速步进电机的控制信息,用以各自分别实时调节及修正第一微型减速步进电机及第二微型减速步进电机的转动角度。
22.一种无极控制水翼倾斜角的装置,其特征在于,包括包括:船载航电系统、装置板载系统、第一微型减速步进电机、第二微型减速步进电机、第一增量式编码器、第二增量式编码器及rs485接口,其中,
23.船载航电系统:用于解算船体姿态、控制船载动力装置及控制水翼角度;
24.装置板载系统:用以接收船载航电系统发送的数据并反馈信息至船载航电系统、计算并各自控制第一微型减速步进电机、第二微型减速步进电机各自的正、反转动的角度,储存当前正、反转动的角度至装置板载系统的外部存储器;
25.rs485接口:其为耦接装置,用以船载航电系统及装置板载系统之间的耦接,并实现船载航电系统与装置板载系统之间的数据通信;
26.第一微型减速步进电机、第二微型减速步进电机:用以正、反转动并控制水翼倾斜角,并与第一增量式编码器、第二增量式编码器各自耦接;
27.第一增量式编码器、第二增量式编码器:用以各自感应第一微型减速步进电机、第二微型减速步进电机的实时转动角度、发送实时转动角度至装置板载系统,并与第一微型减速步进电机、第二微型减速步进电机各自耦接。
28.本发明具有控制精度高、稳定可靠、运行安全且能够在水翼船运行过程中调节倾斜角的有益效果。
附图说明
29.图1为本发明所提供的方法的总流程图;
30.图2为本发明所提供的无极控制水翼倾斜角的装置的功能框图。
具体实施方式
31.图1示出了本发明所提供的方法的总流程图。如图1所示,本发明的方法包括以下步骤:
32.s100:水翼机构的无极控制装置上电并初始化系统时钟及各个接口,其中,
33.无极控制装置包括装置板载系统、微型减速步进电机及增量式编码器,接口包括rs485接口、电机接口、编码器接口及外部存储器接口;
34.微型减速步进电机包括第一微型减速步进电机及第二微型减速步进电机。
35.增量式编码器包括第一增量式编码器及第二增量式编码器。本发明的实施例中采用了两个1024线增量式编码器作为第一增量式编码器及第二增量式编码器。
36.第一增量式编码器机械连接至第一微型减速步进电机、电连接至装置板载系统并实时向装置板载系统反馈第一微型减速步进电机转动的角度;第二增量式编码器机械连接至第二微型减速步进电机、电连接至装置板载系统并实时向装置板载系统反馈第二微型减速步进电机转动的角度。
37.本发明所提供的实施例中,增量式编码器与微型减速步进电机之间的机械连接为同轴连接。
38.装置板载系统根据第一增量式编码器及第二增量式编码器所反馈的角度各自分别对第一微型减速步进电机及第二微型减速步进电机进行伺服控制。
39.s200:装置板载系统读取外部存储器所存储的水翼机构相对于水面的倾斜角角度,无极控制装置向船载航电系统反馈水翼机构相对于水面倾斜角角度,用以向船载航电系统输入当前水翼机构状态,也便于船载航电系统了解当前的水翼机构状态,为接下来的水翼机构控制提供参考数据。
40.s300:装置板载系统接收船载航电系统发送的启动指令,激活无极控制装置中水翼机构相对于水面倾斜角的无极控制功能。
41.如果未激活水翼机构无极控制功能,即使装置板载系统接收到船载航电系统下发的控制水翼转到具体角度的指令,装置板载系统也不会执行具体控制操作,在此情况下,船载航电系统反馈水翼机构无极控制功能未激活。
42.s400:装置板载系统接收船载航电系统发送的控制信息,解析控制信息所包含的待调节的倾斜角角度并向船载航电系统发送收到控制信息后的应答信息;
43.s500:判断当前倾斜角角度与待调节的倾斜角角度是否相等,如果是,结束流程,否则,执行步骤s600;
44.s600:判断当前倾斜角角度是否大于待调节的倾斜角角度,如果是,执行步骤s700,否则,执行步骤s800;
45.s700:根据微型减速步进电机的减速比,计算水翼机构调节到待调节的倾斜角角度时微型减速步进电机所需反转的角度,其中,微型减速步进电机反转用以减小水翼机构相对于水面的倾斜角角度,执行步骤s900;
46.由于使用的是微型减速步进电机,所以在进行具体控制之前,装置的板载系统根据减速步进电机自身的减速比,计算出要使水翼机构调节到目标倾斜角度时电机需要转动的实际角度。本发明所提供的实施例中,使用的微型减速步进电机的减速比是30:1,即,电机转动30圈,减速机构转动1圈。
47.例如,当前的倾斜角角度为5度,待调节的目标倾斜角角度为3度,则水翼机构需要调节减小2度,根据已知的减速比可以计算出要想水翼机构调节2度的倾斜角角度,微型减速步进电机需要转动60度。由于是当前的倾斜角角度大于待调节的目标倾斜角的角度,所以微型减速步进电机需要反转60度。完成反转60度后,执行步骤s900。
48.s800:根据微型减速步进电机的减速比,计算水翼机构调节到待调节的倾斜角角度时微型减速步进电机所需正转的角度,其中,微型减速步进电机正转用以增大水翼机构相对于水面的倾斜角角度;
49.例如,当前的倾斜角角度值为3.3度,待调节的目标倾斜角角度值为4.6度,则水翼机构需要调节增大1.3度,根据已知的减速比可以计算出要想水翼机构调节1.3度的倾斜角角度,微型减速步进电机需要转动39度。由于是当前的倾斜角角度值小于待调节的目标倾斜角的角度值,所以微型减速步进电机需要正转39度。完成正转39度后,执行步骤s900。
50.s900:当装置板载系统控制微型减速步进电机转到待调节的倾斜角角度时,微型减速步进电机停止转动,向外部存储器保存当前的倾斜角角度并通过rs485接口向船载航电系统反馈当前的倾斜角角度。
51.另外,伺服控制包括采用pid算法各自分别对第一微型减速步进电机及第二微型减速步进电机位置环及速度环的双环控制,其中,位置环作为外环,速度环作为内环,位置环的输出作为速度环的输入,速度环的输出作为控制第一微型减速步进电机及第二微型减速步进电机的控制信息,用以各自分别实时调节及修正第一微型减速步进电机及第二微型减速步进电机的转动角度。
52.图2示出了本发明所提供的无极控制水翼倾斜角的装置的功能框图。考虑到该功能框图的简洁,图2未示出增量式编码器与微型减速步进电机的机械连接,仅示出了与装置板载系统的电连接。如图2所示,
53.一种无极控制水翼倾斜角的装置100,包括:船载航电系统101、装置板载系统102、第一微型减速步进电机1031、第二微型减速步进电机1032、第一增量式编码器1041、第二增量式编码器1042及rs485接口105,其中,
54.船载航电系统101:用于解算船体姿态、控制船载动力装置及控制水翼角度;
55.装置板载系统102:用以接收船载航电系统101发送的数据并反馈信息至船载航电系统101、第一微型减速步进电机1031、第二微型减速步进电机1032各自的正、反转动的角度,储存当前正、反转动的角度至装置板载系统102的外部存储器;
56.rs485接口105:其为耦接装置,用以船载航电系统101及装置板载系统102之间的耦接,并实现船载航电系统101与装置板载系统102之间的数据通信;
57.第一微型减速步进电机1031、第二微型减速步进电机1032:用以正、反转动并控制
水翼倾斜角,并与第一增量式编码器1041、第二增量式编码器1042各自耦接;
58.第一增量式编码器1041、第二增量式编码器1042:用以各自感应第一微型减速步进电机1031、第二微型减速步进电机1032的实时转动角度、发送实时转动角度至装置板载系统102,并与第一微型减速步进电机1031、第二微型减速步进电机1032各自机械连接。
59.应当理解的是,本发明不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

