1.本发明涉及水下机器人技术领域,尤其涉及一种水下机器人的抓取装置。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。水下机器人可在高度危险环境、被污染环境以及零可见度的水域代替人工在水下长时间作业,水下机器人上一般配备声呐系统、摄像机、照明灯和机械臂等装置,能提供实时视频、声呐图像,水下机器人的机械臂能抓起重物,水下机器人在石油开发、海事执法取证、科学研究和军事等领域得到广泛应用。
3.现有技术中,水下机器人的机械抓取装置在使用时,一些机械抓取装置不能根据需要伸长手臂进行实际操作,适用性不高。同时,抓取时操作复杂,在抓取物体后不够稳固,物体容易松脱,而且一次只能抓取一个物体,需要抓取多个物体时,需要不断将水下机器人取出放下,费时费力。
技术实现要素:
4.本发明提出的一种水下机器人的抓取装置,以解决上述背景技术中提出的问题。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种水下机器人的抓取装置,包括机器人底板,所述机器人底板的下表面通过固定杆固定有固定板,机器人底板的下表面滑动连接有移动块,移动块上开设有螺纹孔,螺纹孔内螺纹连接有螺杆,机器人底板的下表面对称焊接有固定块,螺杆的两端分别转动安装在两个固定块上,且其中一个固定块上安装有电机,电机的输出轴与螺杆传动连接,固定板上沿长度方向开设有矩形孔,固定板下表面的两侧均焊接有两根竖杆,位于同一侧的两根竖杆的底端固定有固定框,固定框的底部固定有网兜,移动块的下表面安装有液压升降杆一,液压升降杆一的活塞杆贯穿矩形孔连接有安装板一,安装板一的下表面通过安装杆固定有安装板二,安装板二的下表面对称焊接有支撑杆一,支撑杆一的底端转动安装有夹杆,两根夹杆底端相靠近的一侧均连接有弹簧,弹簧的一端连接有夹块,安装板二的上表面安装有液压升降杆二,液压升降杆二的活塞杆贯穿安装板二连接有活动杆,活动杆的两侧沿竖直方向设置有齿条,安装板二的下表面对称安装有支撑杆二,支撑杆二的底端转动安装有齿轮,齿轮的一侧壁上转动安装有连接杆,两根连接杆相远离的一端分别转动安装在两个夹杆上。
7.作为一种优选的实施方式,所述机器人底板的下表面沿长度方向开设有滑槽,滑槽内滑动连接有滑块,且滑块与移动块固定连接。
8.作为一种优选的实施方式,所述矩形孔位于螺杆的正下方,且螺杆的长度大于矩形孔的长度。
9.作为一种优选的实施方式,所述网兜为柔性金属材质。
10.作为一种优选的实施方式,所述夹块的竖截面为圆弧形结构,且两个夹块相靠近的侧壁上设置有倒钩和防滑螺纹。
11.作为一种优选的实施方式,两根所述支撑杆二位于两根支撑杆一之间。
12.作为一种优选的实施方式,所述活动杆位于两个齿轮之间,且齿轮与齿条啮合。
13.本发明的有益效果:
14.1、该一种水下机器人的抓取装置通过设置安装板二、支撑杆一、夹杆、弹簧、夹块、液压升降杆二、活动杆、齿轮、支撑杆二、齿轮和连接杆等结构,可以方便的夹取物体,操作简单,在夹块上设置有倒钩和防滑螺纹,使得抓取物体更为牢固,液压升降杆一可以伸长或缩短抓取装置的长度,实用性强;
15.2、该一种水下机器人的抓取装置通过设置固定杆、固定板、移动块、螺杆、固定块、电机、矩形孔、竖杆和网兜等结构,在抓取物体后,可以移动抓取装置的位置,将物体放入网兜内,从而可以抓取其他物体,不需要重复取出放下水下机器人,省时省力,值得推广。
附图说明
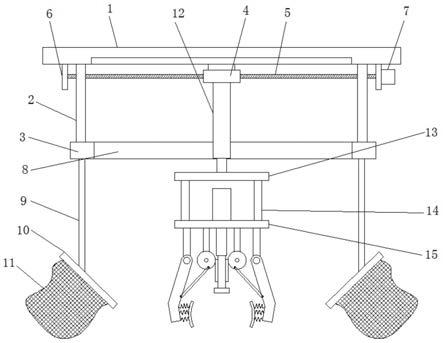
16.图1为本发明的结构示意图;
17.图2为本发明的局部结构示意图;
18.图3为本发明的滑槽和滑块的侧视图;
19.图4为本发明的固定板的俯视图;
20.图5为本发明的固定框和网兜的俯视图。
21.图中标号:1、机器人底板;2、固定杆;3、固定板;4、移动块;5、螺杆;6、固定块;7、电机;8、矩形孔;9、竖杆;10、固定框;11、网兜;12、液压升降杆一;13、安装板一;14、安装杆;15、安装板二;16、支撑杆一;17、夹杆;18、弹簧;19、夹块;20、液压升降杆二;21、活动杆;22、齿条;23、支撑杆二;24、齿轮;25、连接杆。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
23.参照图1
‑
5,一种水下机器人的抓取装置,包括机器人底板1,机器人底板1的下表面通过固定杆2固定有固定板3,机器人底板1的下表面滑动连接有移动块4,移动块4上开设有螺纹孔,螺纹孔内螺纹连接有螺杆5,机器人底板1的下表面对称焊接有固定块6,螺杆5的两端分别转动安装在两个固定块6上,且其中一个固定块6上安装有电机7,电机7的输出轴与螺杆5传动连接,固定板3上沿长度方向开设有矩形孔8,固定板3下表面的两侧均焊接有两根竖杆9,位于同一侧的两根竖杆9的底端固定有固定框10,固定框10的底部固定有网兜11,移动块4的下表面安装有液压升降杆一12,液压升降杆一12的活塞杆贯穿矩形孔8连接有安装板一13,安装板一13的下表面通过安装杆14固定有安装板二15,安装板二15的下表面对称焊接有支撑杆一16,支撑杆一16的底端转动安装有夹杆17,两根夹杆17底端相靠近的一侧均连接有弹簧18,弹簧18的一端连接有夹块19,安装板二15的上表面安装有液压升降杆二20,液压升降杆二20的活塞杆贯穿安装板二15连接有活动杆21,活动杆21的两侧沿竖直方向设置有齿条22,安装板二15的下表面对称安装有支撑杆二23,支撑杆二23的底端
转动安装有齿轮24,齿轮24的一侧壁上转动安装有连接杆25,两根连接杆25相远离的一端分别转动安装在两个夹杆17上。
24.机器人底板1的下表面沿长度方向开设有滑槽,滑槽内滑动连接有滑块,且滑块与移动块4固定连接。
25.矩形孔8位于螺杆5的正下方,且螺杆5的长度大于矩形孔8的长度。
26.网兜11为柔性金属材质。
27.夹块19的竖截面为圆弧形结构,且两个夹块19相靠近的侧壁上设置有倒钩和防滑螺纹。
28.两根支撑杆二23位于两根支撑杆一16之间。
29.活动杆21位于两个齿轮24之间,且齿轮24与齿条22啮合。
30.工作原理:使用时,将设备放入水下,通过液压升降杆一12调节抓取装置的位置,然后打开液压升降杆二20,液压升降杆二20收缩,使得活动杆21和齿条22向上移动,齿条22与齿轮24啮合,齿条22带动齿轮24转动,两根齿轮24同步转动,左侧的齿轮24逆时针转动,右侧的齿轮24顺时针转动,带动两根连接杆25的一端向上移动,两根连接杆25的另一端拉动夹杆17移动,使得两个夹块19相互靠近,两个夹块19相靠近的侧壁上设置有倒钩和防滑螺纹,使得抓取物体更为牢固,需要抓取其他的物体时,先将抓取装置升高,然后打开电机7,电机7带动螺杆5转动,螺杆5带动移动块4移动,移动块4沿着滑槽移动,当移动到固定框10和网兜11的上方时,松开抓取装置,将抓取的物体放入网兜11内,即可进行下一次的抓取,不需要将水下机器人取出再放下,节省了大量的时间,值得推广。
31.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
32.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
33.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

