1.本技术涉及吊车结构的领域,尤其是涉及一种用于吊轨式轨道巡检机器人的防跑偏装置。
背景技术:
2.目前,吊轨式轨道机器人吊设在轨道上,当吊轨式轨道机器人在运行过程中遇到爬坡、下坡、拐弯等情况时,吊轨式轨道机器人和轨道接触部分会出现缝隙进而出现运行不稳的情况。
3.故吊轨式轨道机器人存在运行不稳的问题。
技术实现要素:
4.为了改善吊轨式轨道机器人运行不稳的问题,本技术提供一种用于吊轨式轨道巡检机器人的防跑偏装置。
5.本技术提供的一种用于吊轨式轨道巡检机器人的防跑偏装置采用如下的技术方案:
6.一种用于吊轨式轨道巡检机器人的防跑偏装置,包括导向件和限位块,所述导向件用于对轨道机器人沿轨道方向导向,所述导向件朝向轨道机器人的一侧开设有限位槽,所述限位块滑动设置在所述限位槽中,所述限位块通过连接件与轨道机器人连接,所述连接件为弹性连接件。
7.通过采用上述技术方案,轨道机器人运行时,限位块在导向件的限位槽中沿轨道方向运行,当轨道机器人在水平方向或竖直方向上发生位移时,轨道机器人会挤压弹性连接件,弹性连接件会将限位块挤压在导向件的限位槽中,进而减少轨道机器人的位移,减小轨道机器人的晃动幅度,轨道机器人和轨道接触部分的缝隙会限制在一定范围内,达到改善轨道机器人运行不稳的问题。
8.可选的,所述连接件包括销轴和弹簧,所述弹簧一端与所述限位块固定连接,所述弹簧另一端与轨道机器人固定连接,所述弹簧套设在所述销轴上,且所述销轴一端与限位块转动连接,所述销轴的另一端与轨道机器人滑动连接。
9.通过采用上述技术方案,轨道机器人运行过程中发生竖直方向的晃动时,销轴和弹簧的设置可以将轨道机器人竖直方向上的位移限定在一定范围内,进一步改善轨道机器人运行不稳的问题。
10.可选的,轨道机器人一侧开设有滑动槽,所述滑动槽内设置有滑道,所述销轴在所述滑动槽内滑动。
11.可选的,所述连接件包括销轴、圆环和弹簧,所述销轴一端与所述限位块转动连接,所述圆环固定设置在所述弹簧的一端,所述销轴的一端穿过所述圆环的内径并与所述圆环固定连接,轨道机器人开设固定槽,所述弹簧的自由端固定设置在所述固定槽内。
12.通过采用上述技术方案,轨道机器人运行过程中发生竖直方向的晃动时,弹簧会
发生形变,进而挤压销轴、销轴挤压限位块,将限位块抵设在限位槽内,连接件的设置可以将轨道机器人竖直方向上的位移限定在一定范围内,将弹簧设置在固定槽内是为了弹簧在减少水平方向上的位移,进一步改善轨道机器人运行不稳的问题。
13.可选的,还包括安装套筒,所述安装套筒套设在所述连接件上。
14.可选的,还包括控制模块、晃动检测装置和报警装置,所述报警装置和所述晃动检测装置均与所述控制模块连接;
15.所述晃动检测装置,用于检测轨道机器人的晃动程度,输出晃动检测信号;
16.所述控制模块,用于接收所述晃动检测信号,当所述晃动检测信号反映的晃动幅度达到晃动预设值时,输出报警信号;
17.所述报警装置,用于接收所述报警信号,报警。
18.通过采用上述技术方案,在轨道机器人的运行过程中,晃动检测信号会检测轨道机器人的晃动程度,输出晃动检测信号,控制模块接收晃动检测信号,当晃动检测信号反映的晃动幅度达到晃动预设值,控制模块会控制报警模块报警,晃动检测装置的设置可以在一定程度上检测防跑偏装置是否损坏或者是否达到了预期的防跑偏效果,如果检测到晃动幅度超过预设值表示防跑偏装置可能出现了问题,报警装置用来提示工作人员及时对防跑偏装置进行查看或检修。
19.可选的,所述报警装置为声光报警器。
20.可选的,还包括速度传感器、定位装置和轨道机器人,所述定位装置、所述速度传感器和所述轨道机器人均与所述控制模块连接;
21.所述速度传感器,用于检测所述轨道机器人的速度,输出速度信号;
22.所述定位装置,用于检测所述轨道机器人所处位置,输出位置信号;
23.所述控制模块,用于接收所述速度信号和位置信号,当所述位置信号反映的位置达到位置预设值,输出减速运行信号;当所述速度信号反应的速度达到速度预设值,减速停止信号;
24.所述轨道机器人,用于接收所述减速运行信号,减速、接收所述减速停止信号,停止减速。
25.通过采用上述技术方案,轨道机器人运行时,速度传感器检测轨道机器人的运行速度,当定位装置检测到轨道机器人即将进行爬坡、下坡或拐弯,控制模块控制轨道机器人进行减速,在特殊运行状态减缓速度也可以改善轨道机器人运行不稳的问题。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.轨道机器人运行时,限位块会受到导向件上限位槽的限制,减小了轨道机器人的晃动幅度,轨道机器人和轨道接触部分的缝隙会在一定范围内,进而改善轨道机器人运行不稳的问题;
28.2.在轨道机器人的运行过程中,晃动检测信号会检测轨道机器人的晃动程度,输出晃动检测信号,控制模块接收晃动检测信号,当晃动检测信号反映的晃动幅度达到晃动预设值,控制模块会控制报警模块报警,晃动检测装置的设置可以在一定程度上检测防跑偏装置是否损坏或者是否达到了预期的防跑偏效果,如果检测到晃动幅度超过预设值表示防跑偏装置可能出现了问题,报警装置用来提示工作人员及时对防跑偏装置进行查看或检修。
附图说明
29.图1是本技术公开的用于吊轨式轨道巡检机器人的防跑偏装置的结构示意图。
30.图2是本技术公开的用于吊轨式轨道巡检机器人的防跑偏装置的俯视图。
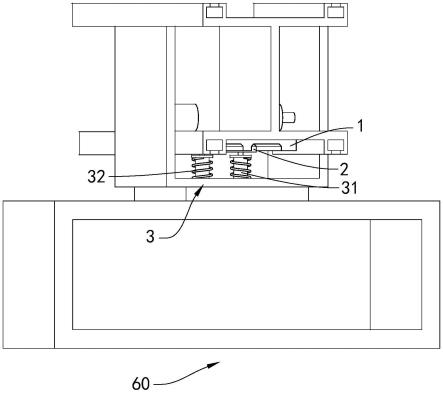
31.图3是本技术公开的用于吊轨式轨道巡检机器人的防跑偏装置的剖视图。
32.图4是本技术公开的用于吊轨式轨道巡检机器人的防跑偏装置的结构框图。
33.附图标记说明:1、导向件;2、限位块;3、连接件;31、销轴;32、弹簧;4、安装套筒;
34.10、控制模块;20、晃动检测装置;30、报警装置;40、速度传感器;50、定位装置;60、轨道机器人。
具体实施方式
35.以下结合附图1-4对本技术作进一步详细说明。
36.本技术实施例公开一种用于吊轨式轨道巡检机器人的防跑偏装置。参照图1、图2和图3,吊轨式轨道机器人60防跑偏装置包括导向件1和两个限位块2,导向件1用于对轨道机器人60沿轨道方向导向,导向件1为矩形体且导向件1的长度与轨道长度相同,轨道为“工”型导轨,轨道包括上轨道板、下轨道板和轨道支撑板,上轨道板和下轨道板平行设置,轨道支撑板与上轨道板垂直且与上轨道板和下轨道板固定连接;轨道机器人60包括两个滑轮和机器人主体,两个滑轮设置在机器人主体的同一侧,两个滑轮分别在下轨道板朝向上轨道板的一侧滑动;在本实施例中,导向件1固定设置下轨道板朝向轨道机器人60的一侧,在另一种实施方式中,导向件1还可以独立设置在与轨道平行的平面内;在导向件1朝向轨道机器人60的一侧开设有两个限位槽,两个限位块2分别滑动设置在两个限位槽中,限位块2通过连接件3与轨道机器人60连接,连接件3上还套设有安装套筒4;连接件3包括销轴31和弹簧32,弹簧32一端与限位块2固定连接,弹簧32另一端与轨道机器人60固定连接,弹簧32套设在销轴31上,且销轴31一端与限位块2转动连接,销轴31的另一端滑动设置在轨道机器上人开设的滑动槽内,在另一种实施方式中,连接件3包括销轴31、圆环和弹簧32,销轴31一端与限位块2转动连接,圆环固定设置在弹簧32的一端,销轴31的一端穿过圆环的内径并与圆环固定连接,轨道机器人60开设固定槽,弹簧32的自由端固定设置在固定槽内。
37.导向件1固定设置在下轨道板朝向机器人主体的一侧,导向件1朝向机器人主体的一侧开设有两个限位槽,限位块2通过连接件3与机器人主体朝向下轨道板的一侧连接,限位块2与限位槽配合使用,用于减少轨道机器人60的位移变化,连接件3上还套设有安装套筒4。在轨道机器人60运行过程中,当遇到需要爬坡、下坡或拐弯的轨道时,由于惯性会在竖直方向或水平方向上产生位移,连接件3会将限位块2块抵设在限位槽内,会在一定程度上减少轨道机器人60在竖直方向或水平方向上产生的位移,达到改善轨道机器人60存在运行不稳的问题。
38.参照图4,为了检测轨道机器人60的运行过程的平稳情况,还包括控制模块10、晃动检测装置20和报警装置30,晃动检测装置20和报警装置30均与控制模块10连接,晃动检测装置20为晃动传感器,用于检测轨道机器人60的晃动情况,输出晃动检测信号,控制模块10接收晃动检测信号,当晃动检测信号反映的晃动幅度达到晃动预设值时,控制模块10输出报警信号,报警装置30接收报警信号报警,在本实施例中,报警装置30为声光报警器,晃动检测装置20为晃动传感器,在其他实施方式中,可以使用其他能够实现报警提示功能和
晃动检测功能的装置,在此不作限制。
39.为了进一步改善轨道机器人运行不平稳的情况,还包括速度传感器40和定位装置50,定位装置50、速度传感器40和轨道机器人60均与控制模块10连接;速度传感器40用于检测所述轨道机器人60的速度,输出速度信号;定位装置50用于检测轨道机器人60所处位置,输出位置信号;控制模块10用于接收速度信号和位置信号,当位置信号反映的位置达到位置预设值,输出减速运行信号;当速度信号反应的速度达到速度预设值,减速停止信号;轨道机器人60用于接收所述减速运行信号减速、接收减速停止信号停止减速。在控制模块10中预存有轨道机器人60运行的轨道,同时设置有位置预设值,位置预设值就是在经历需要爬坡、下坡或拐弯的轨道之前的位置,将轨道机器人60在特殊轨道前提前减速,减小速度的同时也会减小轨道机器人60的惯性,达到改善轨道机器人60存在运行不稳的问题。
40.本技术实施例一种用于吊轨式轨道巡检机器人的防跑偏装置的实施原理为:在轨道机器人60运行过程中,当遇到需要爬坡、下坡或拐弯的轨道时,由于惯性会在竖直方向或水平方向上产生位移,连接件3会将限位块2抵设在限位槽内,会在一定程度上减少轨道机器人60在竖直方向或水平方向上产生的位移。
41.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。