1.本技术涉及巡检机器人技术领域,尤其是涉及一种挂轨机器人用的轨道结构。
背景技术:
2.吊轨巡检机器人是用于在狭窄的空间或障碍物较多的环境中的一种巡检设备,相比其他巡检设备,吊轨巡检机器人有明显的优势,应用也越来越广泛。
3.吊轨巡检机器人通常使用铝合金轨道,但通常情况下轨道较长,且安装空间狭窄,安装起来较为费力。
技术实现要素:
4.为了使轨道便于安装,本技术提供一种挂轨机器人用的轨道结构。
5.本技术提供的一种挂轨机器人用的轨道结构,采用如下的技术方案:
6.一种挂轨机器人用的轨道结构,包括弯轨、导轨、第一连接件和第二连接件,所述导轨包括多截直轨,所述直轨与所述弯轨通过第一连接件连接,所述直轨与所述直轨通过第二连接件连接。
7.通过采用上述技术方案,将导轨分为了多截直轨,直轨与弯轨通过第一连接件连接在一起,直轨与直轨之间均通过第二连接件连接在一起,机器人转弯时,由直轨转移到弯轨上,机器人转过弯后再次进入直轨;安装时,将直轨分截安装,能够适应机器人巡检需求的同时还能使轨道安装更为便捷。
8.可选的,所述弯轨包括底板和多根连接柱,所述底板包括第一弧形板和第二弧形板,所述第一弧形板与所述第二弧形板水平设置,且所述第一弧形板与所述第二弧形板在竖直方向上的投影重合,所述连接柱竖直固定于所述第一弧形板与所述第二弧形板之间,所述第一弧形板与第二弧形板均通过连接件与所述直轨固定连接。
9.可选的,所述第一弧形板与所述第二弧形板上对应开设有连接孔,所述连接柱的两端均开设有螺纹孔,且所述连接柱的两端分别通过连接孔与所述第一弧形板、第二弧形板螺栓连接。
10.通过采用上述技术方案,两个弧形板之间固定多个连接柱,其中连接柱与弧形板之间螺栓连接,从而形成弯轨;此设计既能够限制机器人的运行轨道,在一定程度上也能降低成本。
11.可选的,所述第一连接件包括第一连接板和第二连接板,所述第一连接板一端与所述直轨螺栓连接,另一端与所述第一弧形板螺栓连接;所述第二连接板包括第一横板和第二横板,所述第一横板与所述第二横板均水平设置,且所述第一横板与第二横板在竖直方向上的投影不重合,所述第一横板与第二横板之间竖直固定有竖板,所述竖板的一侧与第一横板的一侧固定连接,所述竖板远离第一横板的一侧与第二横板的一侧固定连接;所述第一横板与所述直轨螺栓连接,所述第二横板与所述第二弧形板螺栓连接。
12.通过采用上述技术方案,连接时,将直轨一面与第一弧形板抵接,第一连接板螺栓
连接于直轨和第一弧形板上,将直轨另一面与第二弧形板抵接,第二连接板螺栓连接在直轨与第二弧形板上,连接件根据需要调整了形状,能够使连接件更贴合直轨与连接板,增加稳定性。
13.可选的,所述直轨包括第一承重板和第二承重板,所述第一承重板与第二承重板均水平设置,且第一承重板与所述第二承重板在竖直方向上的投影重合,所述第一承重板与所述第二承重板之间还固定连接有支撑板,所述支撑板竖直设置,所述第一承重板和第二承重板上均开设有t形的安装槽,且所述安装槽与所述支撑板所在平面平行,所述第一承重板上的安装槽的槽口朝向远离第二承重板的方向,所述第二承重板上的安装槽的槽口朝向远离第一承重板的方向。
14.可选的,所述第二连接件包括t形的连接杆,所述连接杆滑动设置于所述安装槽内,所述第一承重板之间通过所述连接杆固定连接,所述第二承重板之间通过所述连接杆固定连接。
15.通过采用上述技术方案,将连接杆放置于安装槽内,并将连接杆滑至两截直轨连接处,使用螺栓将连接杆固定于安装槽内,从而固定连接两截直轨,使用连接杆配合安装槽固定连接直轨,能够使连接更为便捷、牢固,还能在一定程度上保证连接的精准度。
16.可选的,还包括固定件,所述固定件包括l型板,l型板固定连接于所述直轨上,l型板之间固定连接。
17.通过采用上述技术方案,将l型板固定在直轨上,两个l型板之间连接螺栓,可用于悬挂固定直轨,保证机器人的工作环境。
18.可选的,所述第一弧形板和第二弧形板弧形的角度为90
°
。
19.可选的,所述l型板、第一连接板和第二连接板的厚度均为4mm。
20.通过采用上述技术方案,使用4mm厚的不锈钢板做轨道之间的连接件及固定件,因为不锈钢板具有刚性,能在一定程度上保证轨道的牢固性。
21.综上所述,本技术包括以下至少一种有益技术效果:
22.1.将导轨分为了多截直轨,直轨与弯轨通过第一连接件连接在一起,直轨与直轨之间均通过第二连接件连接在一起,机器人转弯时,由直轨转移到弯轨上,机器人转过弯后再次进入直轨;安装时,将直轨分截安装,能够适应机器人巡检需求的同时还能使轨道安装更为便捷;
23.2.使用连接杆配合安装槽固定连接直轨,能够使连接更为便捷、牢固,还能在一定程度上保证连接的精准度。
附图说明
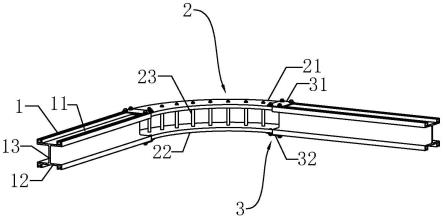
24.图1是本技术的弯轨结构图。
25.图2是本技术的直轨结构图。
26.图3是本技术的固定件结构图。
27.附图标记说明:1、直轨;11、第一承重板;12、第二承重板;13、支撑板;2、弯轨;21、第一弧形板;22第二弧形板;23、连接柱;3、第一连接件;31、第一连接板;32、第二连接板;4、连接杆;5、l型板。
具体实施方式
28.以下结合附图1-3,对本技术作进一步详细说明。
29.本技术实施例公开一种挂轨机器人用的轨道结构。参照图1,一种挂轨机器人用的轨道结构包括直轨1、弯轨2、第一连接件3、第二连接件和固定件。直轨1与弯轨2之间通过第一连接件3固定连接,直轨1与直轨1之间通过第二连接件固定连接,固定件固定连接于直轨1上。
30.直轨1包括第一承重板11和第二承重板12,第一承重板11与第二承重板12均呈长方形形状,第一承重板11与第二承重板12均水平设置,且第一承重板11与第二承重板12在竖直方向上的投影重合,第一承重板11与所述第二承重板12之间还竖直固定有长方形的支撑板13,第一承重板11、第二承重板12与支撑板13之间形成工字状的轨道,第一承重板11和第二承重板12相互背离的一面均开设有与所述支撑板13所在平面平行的t形的安装槽,且第一承重板11上的安装槽的槽口朝向远离第二承重板12的方向,第二承重板12上的安装槽的槽口朝向远离第一承重板11的方向;安装槽两端的底部各开设有两个螺纹孔。
31.第二连接件包括t形的连接杆4,t形的连接杆4与t形的安装槽适配,且t形的连接杆4上开设有四个螺纹孔,本实施例中连接杆4使用不锈钢材质。
32.工作时,将连接杆4放置于安装槽内,并将连接杆4滑至两截直轨1连接处,使用螺栓将连接杆4固定于安装槽内,从而固定连接两截直轨1,使用连接杆4配合安装槽固定连接直轨1,能够使连接更为便捷、牢固,还能在一定程度上保证连接的精准度。
33.第一连接件3包括方形的第一连接板31和第二连接板32,第一连接板31的四个角各开设有一个螺纹孔;第二连接板32包括第一横板和第二横板,第一横板与第二横板均水平设置,且第一横板与第二横板在竖直方向上的投影不重合,第一横板与第二横板之间竖直固定有竖板,竖板的一侧与第一横板的一侧固定连接,竖板远离第一横板的一侧与第二横板的一侧固定连接;第一横板、第二横板和竖板连接形成z字状,且第二连接板32的四个角各开设有一个螺纹孔。
34.弯轨2包括底板和连接柱23,底板包括第一弧形板21和第二弧形板22,第一弧形板21与第二弧形板22两端各开设有两个螺纹孔,第一弧形板21与第一承重板11抵接,并由第一连接板31螺栓连接,第二弧形板22与第二承重板12抵接,并由第二连接板32螺栓连接。第一弧形板21与第二弧形板22上对应开设有螺纹孔,其中第一弧形板21上开设有八个螺纹孔,第一弧形板21上的通孔与第二弧形板22上对应的螺纹孔为一对螺纹孔,连接柱23固定于每对螺纹孔之间,连接柱23呈圆柱状,且两端开设螺纹孔,连接柱23两端分别与第一弧形板21、第二弧形板22螺栓连接。
35.工作时,连接件连接弯轨2与直轨1,连接时,将第一承重板11与第一弧形板21抵接,第一连接板31螺栓连接于直轨1和第一弧形板21上,将第二承重板12与第二弧形板22抵接,第二连接板32螺栓连接在直轨1与第二弧形板22上,连接件根据需要调整了形状,能够使连接件更贴合直轨1与底板,增加稳定性;使用螺栓将连接柱23固定于两个弧形板之间,机器人转弯时,由直轨1转移到第二弧形板22上,两个弧形板之间设置的连接柱23限定了机器人的运动轨道,机器人转过弯后再次进入直轨1;结构简单,且连接较为安全牢固,能够适用于转弯半径较小的场景,适应巡检的需求。
36.固定件包括两个l型板5,l型板5的四个角各开设有一个螺纹孔,l型板5其中一面
设置于安装槽上,且两个l型板5开口方向相反,安装槽底部对应位置开设有螺纹孔,l型板5与安装槽底部螺栓连接;两个l型板5之间通过螺纹孔螺栓连接。
37.工作时,使用螺栓将l型板5固定在直轨1上,再将l型板5固定于其他建筑物上,每截直轨1上均设置一对l型板5,可用于悬挂、固定直轨1,保证机器人的工作环境。
38.本实施例中,l型板5、第一连接板31和第二连接板32均为4mm厚的不锈钢板。
39.本技术实施例一种挂轨机器人用的轨道结构的实施原理为:
40.将导轨分为了多截直轨1,直轨1与弯轨2通过第一连接件3连接在一起,直轨1与直轨1之间均通过第二连接件连接在一起;安装时,将直轨1分截安装,能够适应机器人巡检需求的同时还能使轨道安装更为便捷;连接件根据需要调整了形状,能够使连接件更贴合直轨1与连接板,增加稳定性;使用螺栓将连接柱23固定于两个弧形板之间,机器人转弯时,由直轨1转移到第二弧形板22上,两个弧形板之间设置的连接柱23限定了机器人的运动轨道,机器人转过弯后再次进入直轨1;结构简单,且能够适用于转弯半径较小的场景,适应巡检的需求。
41.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。