1.本实用新型涉及机器人技术领域,具体为一种机器人用防撞结构。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力,机器人在现代化社会中有着广泛的应用,部分机器人承担着运输的作用,在运输时,为了防止机器人因出现故障而与附近建筑发生碰撞而导致机器人损坏,所以需要防撞结构来保护机器人。
3.现有的机器人用防撞结构往往采用在机器人的外部设置软性材质来起到缓冲的作用,例如橡胶板和海绵等,该方式防撞结构单一,导致防撞效果差,因此需要对机器人用防撞结构进行设计改造,有效的防止其出现因防撞效果单一而导致防撞效果差的现象。
技术实现要素:
4.为解决上述背景技术中提出的问题,本实用新型的目的在于提供一种机器人用防撞结构,具备防撞效果好的优点,解决了现有的机器人用防撞结构往往采用在机器人的外部设置软性材质来起到缓冲的作用,例如橡胶板和海绵等,该方式防撞结构单一,导致防撞效果差的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种机器人用防撞结构,包括机器人外壳,所述机器人外壳的左侧、背面和右侧均设置有滑槽,且滑槽的内部活动连接有第一滑块,所述机器人外壳的左侧、背面和右侧均设置有挡板,所述挡板靠近机器人外壳的一侧固定连接有支撑架,所述支撑架表面的顶部和底部分别活动连接有第二滑块和第三滑块,所述第二滑块的顶部和第三滑块的底部均固定连接有压簧,所述压簧与支撑架固定连接,所述第二滑块和第三滑块靠近机器人外壳的一侧分别铰接有第一连杆和第二连杆,所述第一连杆与第二连杆铰接,所述第一连杆与第一滑块铰接,所述第二连杆与机器人外壳铰接,所述支撑架的顶部和底部均固定连接有阻尼系统,所述机器人外壳的正面设置有箱门,所述箱门的正面固定连接有气囊。
6.作为本实用新型优选的,所述阻尼系统包括固定连接在支撑架顶部和底部的铜管,所述铜管的内部活动连接有磁性小球,所述磁性小球通过支撑柱与机器人外壳固定连接。
7.作为本实用新型优选的,所述机器人外壳顶部的四周均通过支撑柱固定连接有第一磁铁板,所述第一磁铁板顶部的四周均固定连接有套筒,所述套筒的内部活动连接有支撑杆,所述支撑杆的顶部固定连接有第二磁铁板,所述第一磁铁板与第二磁铁板之间的磁极相同。
8.作为本实用新型优选的,所述支撑架靠近机器人外壳一侧的顶部和底部均固定连接有硅胶块。
9.作为本实用新型优选的,所述挡板远离机器人外壳的一侧固定连接有橡胶板。
10.作为本实用新型优选的,所述第二滑块和第三滑块靠近挡板的一侧活动连接有滚轮,所述滚轮与挡板活动连接。
11.与现有技术相比,本实用新型的有益效果如下:
12.1、本实用新型通过机器人外壳、第一滑块、挡板、支撑架、第二滑块、第三滑块、压簧、第一连杆、第二连杆、阻尼系统、箱门和气囊的设置,解决了现有的机器人用防撞结构往往采用在机器人的外部设置软性材质来起到缓冲的作用,例如橡胶板和海绵等,该方式防撞结构单一,导致防撞效果差的问题,使用时,当机器人外壳的正面受到撞击时,可以经气囊进行缓冲,从而达到防撞的目的,当机器人外壳的左侧、右侧和背面受到撞击时,挡板向靠近机器人外壳的一侧移动,由于第一连杆与第二连杆铰接,使得第二滑块和第三滑块互相远离,从而对压簧进行挤压,从而把撞击的冲击力转化为压簧的弹性势能,从而起到缓冲的作用,进而实现机器人外壳的防撞击,该装置具备防撞效果好的优点。
13.2、本实用新型通过阻尼系统的设置,可以对压簧起到阻尼作用,该阻尼系统利用楞次定律的原理,从而防止压簧受到压缩时发生高频的往复移动。
附图说明
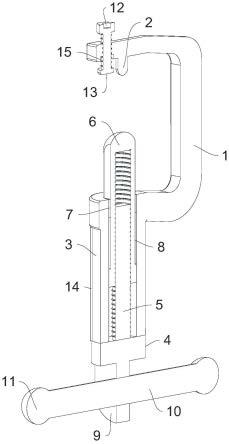
14.图1为本实用新型结构示意图;
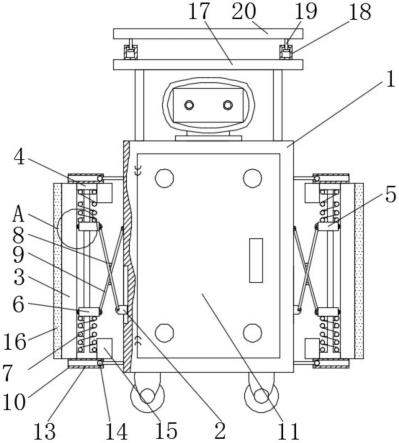
15.图2为本实用新型结构左侧示意图;
16.图3为本实用新型图1中a处结构放大示意图。
17.图中:1、机器人外壳;2、第一滑块;3、挡板;4、支撑架;5、第二滑块;6、第三滑块;7、压簧;8、第一连杆;9、第二连杆;10、阻尼系统;11、箱门;12、气囊;13、铜管;14、磁性小球;15、硅胶块;16、橡胶板;17、第一磁铁板;18、套筒;19、支撑杆;20、第二磁铁板;21、滚轮。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.如图1至图3所示,一种机器人用防撞结构,包括机器人外壳1,机器人外壳1的左侧、背面和右侧均设置有滑槽,且滑槽的内部活动连接有第一滑块2,机器人外壳1的左侧、背面和右侧均设置有挡板3,挡板3靠近机器人外壳1的一侧固定连接有支撑架4,支撑架4表面的顶部和底部分别活动连接有第二滑块5和第三滑块6,第二滑块5的顶部和第三滑块6的底部均固定连接有压簧7,压簧7与支撑架4固定连接,第二滑块5和第三滑块6靠近机器人外壳1的一侧分别铰接有第一连杆8和第二连杆9,第一连杆8与第二连杆9铰接,第一连杆8与第一滑块2铰接,第二连杆9与机器人外壳1铰接,支撑架4的顶部和底部均固定连接有阻尼系统10,机器人外壳1的正面设置有箱门11,箱门11的正面固定连接有气囊12。
20.参考图1和图2,阻尼系统10包括固定连接在支撑架4顶部和底部的铜管13,铜管13的内部活动连接有磁性小球14,磁性小球14通过支撑柱与机器人外壳1固定连接。
21.作为本实用新型的一种技术优化方案,通过阻尼系统10的设置,可以对压簧7起到
阻尼作用,该阻尼系统10利用楞次定律的原理,从而防止压簧7受到压缩时发生高频的往复移动。
22.参考图1和图2,机器人外壳1顶部的四周均通过支撑柱固定连接有第一磁铁板17,第一磁铁板17顶部的四周均固定连接有套筒18,套筒18的内部活动连接有支撑杆19,支撑杆19的顶部固定连接有第二磁铁板20,第一磁铁板17与第二磁铁板20之间的磁极相同。
23.作为本实用新型的一种技术优化方案,通过第一磁铁板17、套筒18、支撑杆19和第二磁铁板20的设置,可以在机器人外壳1的顶部受到撞击时,利用第一磁铁板17与第二磁铁板20之间的斥力,来起到缓冲的目的。
24.参考图1和图2,支撑架4靠近机器人外壳1一侧的顶部和底部均固定连接有硅胶块15。
25.作为本实用新型的一种技术优化方案,通过硅胶块15的设置,可以利用硅胶柔软的特性,进一步提高装置的防撞击效果。
26.参考图1至图3,挡板3远离机器人外壳1的一侧固定连接有橡胶板16。
27.作为本实用新型的一种技术优化方案,通过橡胶板16的设置,可以利用橡胶柔软的特性,进一步提高装置的防撞击性能。
28.参考图1至图3,第二滑块5和第三滑块6靠近挡板3的一侧活动连接有滚轮21,滚轮21与挡板3活动连接。
29.作为本实用新型的一种技术优化方案,通过滚轮21的设置,可以减小挡板3与第二滑块5和第三滑块6之间的摩擦力,从而方便第二滑块5和第三滑块6在挡板3的表面滑动。
30.本实用新型的工作原理及使用流程:使用时,当机器人外壳1的正面受到撞击时,可以经气囊12进行缓冲,从而达到防撞的目的,当机器人外壳1的左侧、右侧和背面受到撞击时,挡板3向靠近机器人外壳1的一侧移动,由于第一连杆8与第二连杆9铰接,使得第二滑块5和第三滑块6互相远离,从而对压簧7进行挤压,从而把撞击的冲击力转化为压簧7的弹性势能,从而起到缓冲的作用,进而实现机器人外壳1的防撞击,当机器人外壳1的顶部受到撞击时,第一磁铁板17与第二磁铁板20相邻一侧的磁铁相同,使得第一磁铁板17与第二磁铁板20之间为斥力,当第二磁铁板20的顶部受到撞击时,从而利用第一磁铁板17与第二磁铁板20之间的磁场,来达到缓冲的目的,从而实现对机器人外壳1的顶部防撞击。
31.综上所述:该机器人用防撞结构,通过机器人外壳1、第一滑块2、挡板3、支撑架4、第二滑块5、第三滑块6、压簧7、第一连杆8、第二连杆9、阻尼系统10、箱门11和气囊12的设置,解决了现有的机器人用防撞结构往往采用在机器人的外部设置软性材质来起到缓冲的作用,例如橡胶板16和海绵等,该方式防撞结构单一,导致防撞效果差的问题。
32.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修
改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。