1.本发明涉及设定或管理工具的技术,尤其涉及具备工具设定管理功能的控制装置、机械系统及工具。
背景技术:
2.在安装于机器人、机床等机械上的工具中,存在由电动机驱动的类型,有时也通过机械的控制装置来控制工具。在这样的情况下,为了通过控制装置使工具正确地动作,有时需要将工具的各种信息预先设定于控制装置。例如,在伺服电动机驱动的点焊枪中,除了减速比、加压力、电极前端间的最大开放量等电动机相关参数以外,还事先设定工具相关参数。以往,需要从工具的制作者侧获得这样的工具设定信息,并设定在控制装置中。作为与该机械的设定或管理相关的技术,公知有后述的文献。
3.在专利文献1中记载了如下内容:在构成机器人机构部或其一部分的手腕等机构单元中设置存储器,在该存储器中预先存储机器人机构部或机构单元的每个个体所固有的且包含机器人装置的轨道控制的运算所使用的参数及反映在该参数中的信息中的至少一方的保存信息,通过向机器人控制装置读入保存信息,使机器人机构部或机构单元的更换后的各数据变更作业自动化。另外,存储器记载为编码器所附带的非易失性存储器。
4.在专利文献2中记载了一种工具数据管理装置,其具备:数据存储装置,其设置于固定有工具的刀柄,保持工具数据,并且送出该数据;以及数据输入输出单元,其固定于机床,接收从数据存储装置传送的数据并提供给机床的控制装置,并且通过机床的控制向数据存储装置转发预定的工具数据。
5.在专利文献3中记载了一种机器人系统,其由机器人主体和使用机器人主体的初始设定信息即固有数据来进行机器人主体的控制的控制器构成,其中,机器人主体以及控制器分别存储固有数据,控制器读出存储于机器人主体的固有数据,与存储于控制器侧的固有数据进行对照,由此即使在更换了机器人主体的内置板的情况下也能够由控制器进行控制。另外,记载了在机器人主体以及控制器的存储器中还存储有动作历史以及维护信息。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2004-148433号公报
9.专利文献2:日本特开昭62-63050号公报
10.专利文献3:日本特开2001-242922号公报
技术实现要素:
11.发明所要解决的课题
12.作为简化工具设定的方法,有时使用预先准备保存有工具设定信息的文件并使控制装置读入的方法。然而,存在需要预先准备保存有工具设定信息的文件,另外需要管理工具设定信息这样的缺点。
13.另外,随着生产,工具的状态发生变化,但在将工具向其他的机械重新安装时,有时想要以某种形式持续管理此前保持的工具状态信息。例如在工具的运转时间经过了一定时间时需要更换工具的情况下,即使安装工具的机械改变,有时也想要累计运转时间来进行管理。作为简化工具的管理的方法,存在如下缺点:能够通过使其他的控制装置读入保存有工具状态信息的文件来进行应对,但需要事先输出文件。
14.因此,需要一种进一步简化工具的设定或管理的技术。
15.用于解决课题的手段
16.本公开的一个方式提供一种控制装置,对能够装卸地安装于机械的带存储器的工具进行控制,该控制装置具备:工具信息读入部,其读入被写入工具的存储器中的工具设定信息以及工具状态信息中的至少一方;以及工具设定部,其基于读入的工具设定信息以及工具状态信息中的至少一方来设定工具,工具由带编码器的电动机驱动,存储器是附属于编码器的存储器。
17.本公开的另一方式提供一种控制系统,具备:第一控制装置,其对能够装卸地安装于第一机械的带存储器的工具进行控制;以及第二控制装置,其对能够装卸地安装于第二机械的工具进行控制,第一控制装置将工具设定信息以及工具状态信息中的至少一方写入工具的存储器,第二控制装置读入被写入的工具设定信息以及工具状态信息中的至少一方。
18.本公开的另一方式提供一种工具,该工具能够装卸地安装于机械并由控制装置控制,该工具具备存储器,该存储器由控制装置写入工具设定信息以及工具状态信息中的至少一方,并由控制装置读入工具设定信息以及工具状态信息中的至少一方。
19.发明效果
20.根据本公开的一个方式,能够基于写入到工具的存储器中的工具设定信息以及工具状态信息中的至少一方将工具自动地设定于控制装置,因此能够简化工具的设定。
21.根据本公开的其他方式,第一控制装置将工具设定信息以及工具状态信息中的至少一方写入工具的存储器,第二控制装置读入被写入的工具设定信息以及工具状态信息中的至少一方,因此即使在将工具从第一机械重新安装于第二机械的情况下,也能够继续管理工具。
22.根据本公开的另一方式,工具具备存储器,该存储器由控制装置写入工具设定信息以及工具状态信息中的至少一方,通过控制装置读入工具设定信息以及工具状态信息中的至少一方,因此能够简化工具的设定或者管理。
附图说明
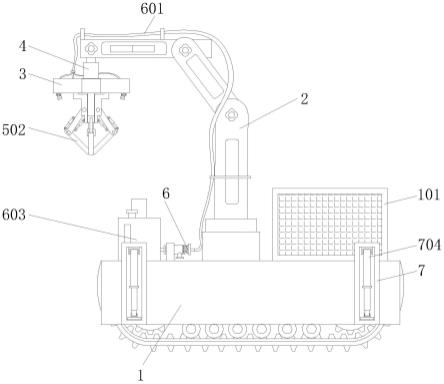
23.图1是表示机械、工具以及控制装置的一例的概略图。
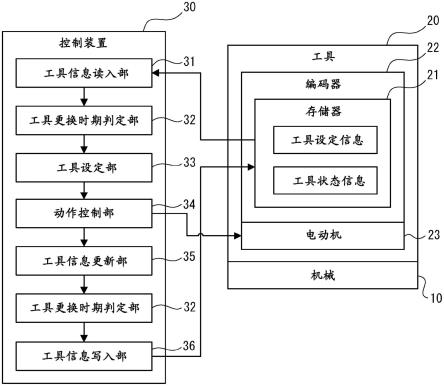
24.图2是表示机械、工具以及控制装置的结构例的框图。
25.图3是表示工具设定信息以及工具状态信息的读入例的概念图。
26.图4是示出工具设定信息以及工具状态信息的写入例的概念图。
27.图5是表示控制系统的结构例的框图。
具体实施方式
28.以下,参照附图详细说明本公开的实施方式。在各附图中,对相同或类似的构成要素赋予相同或类似的符号。另外,以下所记载的实施方式并不限定请求专利保护的范围所记载的发明的技术范围以及用语的意义。
29.图1表示机械10、工具20以及控制装置30的一例。机械10例如是机器人,但也可以是机床、工程机械等其他机械。工具20可以是能够装卸地安装于机械10的带存储器的工具,例如是焊接工具(点焊枪),但也可以是密封工具、涂装工具、手等其他工具。机械10以及工具20经由有线或无线与控制装置30连接。控制装置30例如可以是具备cpu(central processing unit,中央处理单元)、asic(application specific integrated circuit,专用集成电路)、fpga(field-programmable gate array,现场可编程门阵列)等处理器、集成电路的计算机装置。控制装置30控制机械10以及工具20,但也可以是仅控制工具20的控制装置。
30.图2表示机械10、工具20以及控制装置30的结构例。工具20具备存储工具设定信息及工具状态信息中的至少一方的存储器21。存储器21例如可以是非易失性存储器,在工具20由伺服电动机等带编码器的电动机23驱动的情况下也可以是附属于编码器22的现有的存储器。编码器22例如可以是光学式编码器,但也可以是机械式、光学式、磁式、电磁感应式等编码器。一般在编码器22的存储器21中保存有旋转位置、旋转速度、旋转量、旋转方向等,但也可以在该存储器21中保存工具设定信息以及工具状态信息中的至少一方。通过使用编码器22的存储器21而不需要与带编码器的电动机23的连接线分开地将工具通信单元设置于工具20,因此仅通过将带编码器的电动机23连接于控制装置30就能够实施工具20的设定或管理。即,不需要追加的装置或操作,能够以与以往相同的成本简化工具20的设定或管理。
31.图3表示工具设定信息及工具状态信息的读入例。工具设定信息例如包括减速比、加压力、最高速度、最大开放量等,工具状态信息包括例如加压次数、总移动距离、前端磨损量、总运转时间等。控制装置30可以具备:工具信息读入部31,其读入在工具20的存储器21中写入的工具设定信息以及工具状态信息中的至少一方;以及工具设定部33,其基于读入的工具设定信息以及工具状态信息中的至少一方来设定工具20(参照图2)。由于工具20自身具有工具设定信息,因此不需要从工具20的制造商侧另行获得工具设定信息,或者事先准备设定数据,或者另行管理设定数据。即,由于能够在控制装置30自动地设定工具20,因此能够简化工具20的设定。另外,工具设定信息、工具状态信息的读入定时可以是将工具20与控制装置30连接的工具连接时,但也可以是实际使用工具20的工具使用时等。通过在工具连接时读入,能够进行工具20的即插即用。
32.控制装置30具备基于读入的工具设定信息来控制工具20的动作的动作控制部34。动作控制部34例如基于减速比、最高速度等来控制工具速度,或者基于加压力、最大开放量等来控制工具位置。另外,控制装置30可以具备更新工具状态信息的工具信息更新部35。例如,工具信息更新部35可以根据工具20的动作来更新加压次数、总移动距离、总运转时间等。另外,控制装置30也可以具备根据被读入的或被更新的工具状态信息来判定工具的更换时期的工具更换时期判定部32。例如,工具更换时期判定部32可以基于加压次数、总移动距离、总运转时间等的阈值判定工具更换时期,并将判定结果通知给用户或外部装置。
33.图4表示工具设定信息及工具状态信息的写入例。控制装置30可以具备将工具设定信息以及工具状态信息中的至少一方写入工具20的存储器21的工具信息写入部36。例如,工具信息写入部36将更新后的工具状态信息写入工具20的存储器21即可。由于工具20自身具有工具状态信息,因此不需要另外管理工具状态信息,能够简化工具20的管理。工具状态信息的写入定时例如可以是工件w的生产中(例如工具动作中),也可以是停止了工具20的动作的工具停止时等。另外,工具设定信息也可以在工具20的制造时、出厂时等被预先写入,但例如在从操作盘将工具20初始设定于控制装置30的情况下,也可以在工具初始设定时将工具设定信息写入工具20的存储器21。
34.图5表示控制系统的结构例。例如控制系统具备:第一控制装置30,其对能够装卸地安装于第一机械10的带存储器的工具20进行控制;以及第二控制装置30,其对能够装卸地安装于第二机械10的工具20进行控制。第一控制装置30将工具设定信息以及工具状态信息中的至少一方写入工具20的存储器21。在将工具20从第一机械10重新安装于第二机械10之后,第二控制装置30读入被写入的工具设定信息以及工具状态信息中的至少一方。第二控制装置30既可以基于读入的工具设定信息来设定工具,也可以根据工具20的动作来更新工具状态信息,还可以基于被读出的或者更新后的工具状态信息来判定工具20的更换时期。另外,第二控制装置30将工具设定信息以及工具状态信息中的至少一方写入工具20的存储器21。由此,即使在将工具20从第一机械10向第二机械10重新安装的情况下,也能够继续管理工具20。另外,如上所述,第一机械10、第二机械10例如是机器人,但也可以是机床等其他机械。
35.这样,工具20具备由控制装置30写入工具设定信息以及工具状态信息中的至少一方并通过控制装置30读入工具设定信息以及工具状态信息中的至少一方的存储器21。由于工具20自身具有工具设定信息及工具状态信息中的至少一方,因此能够简化工具20的设定或管理。另外,通过使用编码器22的存储器21,仅将带编码器的电动机23与控制装置30连接(即不需要追加的装置或操作,以与以往相同的成本),就能够实施工具20的设定或管理。
36.根据以上的实施方式,能够进一步简化工具的设定或管理。另外,由所述的处理器等执行的程序可以记录于计算机可读取的非瞬态的记录介质、例如cd-rom等来提供,或者也可以经由有线或无线从wan(wide area network:广域网)或lan(local area network:局域网)上的服务器装置分发而提供。
37.在本说明书中,对各种实施方式进行了说明,但本发明并不限定于前述的实施方式,应该认识到在请求专利保护的范围所记载的范围内能够进行各种变更。
38.附图标记的说明
39.10机械、
40.20工具、
41.21存储器、
42.22编码器、
43.30控制装置、
44.31工具信息读入部、
45.32工具更换时期判定部、
46.33工具设定部、
47.34动作控制部、
48.35工具信息更新部、
49.36工具信息写入部、
50.w工件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。