技术特征:
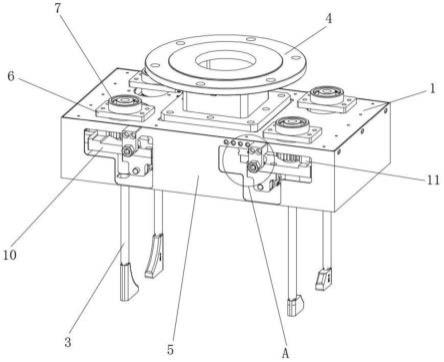
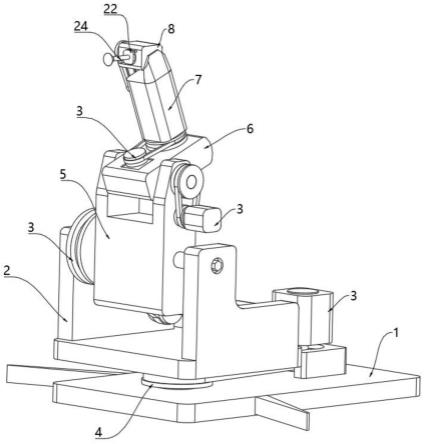
1.一种适应狭小空间自动装箱机械手,其特征在于:包括基板(1)及至少一组旋转装夹组件,所述旋转装夹组件包括两个平行设置的转轴(2),每个所述转轴(2)的一端均转动安装于所述基板(1)上、另一端连接有一个装夹手指(3),同组所述旋转装夹组件的两个转轴(2)连接的两个装夹手指(3)各从目标物体两侧夹持支撑目标物体;同组所述旋转装夹组件的两个转轴(2)之间通过驱动机构带动、并同时带动所连接的所述装夹手指(3)转动到位。2.根据权利要求1所述的一种适应狭小空间自动装箱机械手,其特征在于:各组旋转装夹组件的所述转轴(2)的轴向中心线均垂直于水平面。3.根据权利要求1所述的一种适应狭小空间自动装箱机械手,其特征在于:各所述装夹手指(3)均位于所述基板(1)的下方,所述基板(1)的顶端固接有外接移动装置连接件(4),所述外接移动装置连接件(4)上设有连接法兰部。4.根据权利要求1所述的一种适应狭小空间自动装箱机械手,其特征在于:所述基板(1)上安装有用于保护各组所述旋转装夹组件的保护罩(5),各所述装夹手指(3)分别穿出所述保护罩(5)。5.根据权利要求1所述的一种适应狭小空间自动装箱机械手,其特征在于:所述基板(1)上与各所述转轴(2)的设置位置对应处分别设有支撑座(6),各所述支撑座(6)上分别设有轴承座(7),各所述轴承座(7)中均设有与对应的一个所述转轴(2)连接的轴承。6.根据权利要求1所述的一种适应狭小空间自动装箱机械手,其特征在于:每个所述装夹手指(3)均分为连接在一起的连接杆部及夹持块部,所述连接杆部的一端与所述转轴(2)的另一端连接,所述夹持块部固接于所述连接杆部的另一端。7.根据权利要求1所述的一种适应狭小空间自动装箱机械手,其特征在于:每个所述转轴(2)上均设有驱动齿轮(8);所述驱动机构包括驱动气缸(9)、滑动板(10)及齿条(11),所述驱动气缸(9)的缸体与一个所述滑动板(10)连接,所述驱动气缸(9)的活塞杆与另一个所述滑动板(10)连接,每个所述滑动板(10)上各设有所述齿条(11),每个所述齿条(11)分别与对应的一个驱动齿轮(8)啮合;所述驱动气缸(9)伸缩并带动所连接的两个滑动板(10)反向或相向移动、进而带动同组旋转装夹组件的两个所述转轴(2)与所连接的驱动齿轮(8)共同转动,同组所述旋转装夹组件的两个所述转轴(2)的转向相反。8.根据权利要求7所述的一种适应狭小空间自动装箱机械手,其特征在于:所述基板(1)上安装有导轨(12),各所述滑动板(10)上分别设有与邻近的所述导轨(12)滑动连接的滑块(13)。9.根据权利要求7所述的一种适应狭小空间自动装箱机械手,其特征在于:每个所述滑动板(10)上均开设有用于对对应的所述转轴(2)限位导向的导向槽,各所述转轴(2)分别穿过对应的所述导向槽。10.根据权利要求7所述的一种适应狭小空间自动装箱机械手,其特征在于:所述基板(1)上分别设有用于挡住所述滑动板(10)的限位挡杆a(14),所述滑动板(10)上靠近邻近的所述限位挡杆(14)的位置设有限位挡块a(15)。
技术总结
本发明属于抓取装置领域,具体地说是一种适应狭小空间自动装箱机械手,包括基板及旋转装夹组件,旋转装夹组件包括两个转轴,每个转轴的一端均转动安装于基板上、另一端连接有一个装夹手指,同组旋转装夹组件的两个转轴连接的两个装夹手指各从目标物体两侧夹持支撑目标物体。同组旋转装夹组件的两个转轴之间通过驱动机构带动、并同时带动所连接的装夹手指转动到位。本发明通过旋转装夹组件的设置,采用旋转式传动的机械手结构,从而有效地解决了当前常见的开合式机械手在工作时容易出现工作空间不足的问题。通过各处限位结构的设置,可起到对旋转装夹组件中的各零件导向限位作用,使整体装置在旋转调整位置时不致超出预定位置。置。置。
技术研发人员:何涛 王军义 张延利 柳连柱 孙德源 徐志刚
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:2022.11.17
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。