1.本发明涉及一种机器人的关节结构,特别是对于软性机器人(柔性机器人)的机械手优选的关节结构。
背景技术:
2.工业用机器人通常由刚性高的机构构成机械手,边通过传感器进行状态测量,边对末端执行器的三维位置进行控制。然而,仅由刚性高的机构构成的机器人例如难以进行随着对对象物接触的动作、要求比传感器的测量误差更高精度的动作等。作为解决这样的技术问题的方法,提出了所谓的软性机器人(柔性机器人)的方法。例如,在机器人的一部分设置受到外力而进行位移乃至变形的柔性机构,自动追随对象物的形状等。专利文献1、2中所记载的挠性机构也是其一例。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平5-192892号公报
6.专利文献2:日本特开平8-118281号公报
技术实现要素:
7.发明要解决的技术问题
8.然而,专利文献1、2中所提出的那样的以往的挠性机构,由于可动范围非常小,且只能进行限定性的活动(能够进行水平面内的微小位移的程度),因此能够应用的场景、用途是限定的。
9.本发明是鉴于上述实际情况而完成的,目的在于提供一种机器人的关节结构,该机器人的关节结构能够进行主动的多自由度的控制、且还兼具柔性。
10.用于解决技术问题的方案
11.本公开包括一种关节结构,是将机器人的机械手的第一部件与第二部件之间连结的关节结构,其特征在于,具有能够控制所述第二部件相对于所述第一部件的相对的位置及/或角度的斯图尔特平台(stewart platform),所述斯图尔特平台具有:第一构件,接合于所述第一部件;第二构件,接合于所述第二部件;多个脚,将所述第一构件与所述第二构件连接;驱动机构,为了改变所述第二构件相对于所述第一构件的相对的位置及/或角度而使各脚的有效长度变化;以及软性机构,在对所述第二构件作用外力的情况下,使所述脚的有效长度弹性地变化,在脱离所述外力的情况下,使所述脚的有效长度复原。
12.在此,第一部件可以是机械手的关节与关节之间的连杆,第二部件可以是比第一部件更靠末端执行器侧的连杆或末端执行器。根据该结构,通过驱动机构使斯图尔特平台的各脚的有效长度变化,而能够实现第一部件与第二部件的相对的位置及/或角度的主动的多自由度控制。此外,在对机器人作用外力的情况下,脚的有效长度弹性地变化,第一部件与第二部件的相对的位置及/或角度追随外力而被动地变化。因此,能够同时实现主动的
多自由度控制与柔性。
[0013]“脚的有效长度”可认为是从第一构件与脚的连接点至第二构件与脚的连接点的距离。在脚为连结多根杆而成的结构、由弯折的构件构成的情况下,也可同样地认为。
[0014]
也可以为,所述脚具有杆,该杆被支承体支承为滑动自如,并通过进行滑动而使所述脚的有效长度变化,所述驱动机构具有:线状构件,安装于所述杆,具有可挠性;以及弹性构件,当拉伸所述线状构件使所述杆滑动时,则发生弹性变形,产生对抗所述线状构件的拉伸力的弹性复原力。根据该结构,当对线状构件施加拉伸力时,则杆滑动而弹性构件逐渐发生弹性变形。然后,在拉伸力与弹性复原力均衡的位置,杆的滑动停止。根据这样的结构,通过调整线状构件的拉伸力,而能够简单且精度良好地控制杆的滑动状态。一个脚的有效长度根据斯图尔特平台的具体结构而存在只由该脚的杆的滑动状态来确定的情况、和综合全部脚的杆的滑动状态来确定的情况。在任一情况下,均能够通过精度良好地控制各杆的滑动状态而精度良好地控制各脚的有效长度。
[0015]
在该结构中,所述弹性构件也可以兼作所述软性机构。例如,当在与线状构件的拉伸力相同的方向上作用外力时,则拉伸力与外力的合力使弹性构件进一步变形,杆的滑动状态变化,从而脚的有效长度变化。然后,当外力消失时,则杆的滑动状态恢复至与拉伸力均衡的位置。这样,通过相同构件构成驱动机构和软性机构,而能够实现组件件数的减少,进而实现成本降低以及装置的小型化。
[0016]
也可以为所述弹性构件包括非线性弹簧部件,通过所述线状构件的拉伸量改变所述弹性构件的变形量,而所述软性机构的刚性是可变的。由此,也能够进行关节结构的硬度(柔性)的控制。
[0017]
所述支承体也可以是设置于所述第一构件的轴承。该构成具有能够简化脚自身的结构的优点。
[0018]
所述支承体也可以是设置于所述脚并供所述杆滑动自如地插入的缸体构件。该构成具有能够简化第一构件、第二构件的结构的优点。
[0019]
也可以是,所述线状构件的端部被拉出到所述关节结构的外侧,并连接于与所述关节结构分开设置的驱动源。这样,通过使线状构件的驱动源与关节结构不同体,且配置在关节结构的外部,而能够使关节结构本身紧凑且轻量地构成。
[0020]
也可以是,所述脚具有通过在长度方向上移动而使所述脚的有效长度变化的杆,所述驱动机构是通过压缩性流体使所述杆在其长度方向上移动的致动器。根据这样的结构,通过控制压缩性流体的供给/排出,而能够简单且精度良好地控制杆的移动量。
[0021]
所述致动器的所述压缩性流体也可以兼作所述软性机构。例如,当在压入杆的方向上作用外力时,则致动器内部的压缩性流体弹性压缩乃至弹性膨胀,杆的移动量变化。然后,当外力消失时,则压缩乃至膨胀的压缩性流体恢复原状,杆的移动量恢复成原来的状态。这样,通过相同构件构成驱动机构和软性机构,而能够实现组件件数的减少,进而实现成本降低以及装置的小型化。
[0022]
所述致动器也可以是气缸。
[0023]
也可以是,用于对所述致动器进行所述压缩性流体的供给/排出的管被拉出到所述关节结构的外侧,并连接于与所述关节结构分开设置的驱动源。这样,通过使致动器的驱动源与关节结构不同体,且配置在关节结构的外部,而能够使关节结构本身紧凑且轻量地
构成。
[0024]
也可以是,进一步具有锁定机构,该锁定机构进行自由状态与锁定状态的切换,所述自由状态是所述第二部件独立于所述第一部件而成为运动自如的状态,所述锁定状态是所述第二部件被固定于所述第一部件的状态。在锁定状态下,第一部件与第二部件如一个刚体般工作。由此,由于能够切换刚性高的机器人(锁定状态)与柔性机器人(自由状态),因此例如通过结合机器人的动作、情景适当区分使用,而可期待能够实现机器人的应用范围的扩大、有效的动作。
[0025]
本发明可以视为具有上述构成的至少一部分的机器人的关节结构,也可以视为控制机器人的机械手的部件的位置/角度的致动器。此外,也可以视为具有这样的关节结构或者致动器的机器人的机械手乃至机器人。此外,本发明也能够视为通过上述构成的关节结构来控制机器人的机械手的部件的位置/角度的控制方法乃至驱动方法等。另外,上述构成各者能够尽可能地互相组合而构成本发明。
[0026]
发明效果
[0027]
根据本发明,能够提供一种机器人的关节结构,该机器人的关节结构能够进行主动的多自由度的控制、且还兼具柔性。
附图说明
[0028]
图1a以及图1b是具有斯图尔特平台的关节结构的示意图。
[0029]
图2是示出作用外力时的活动的图。
[0030]
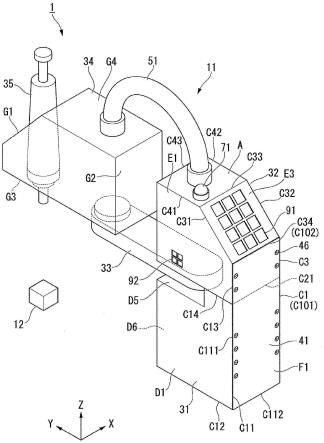
图3是示出机器人的整体构成的示意图。
[0031]
图4是关节结构的立体图。
[0032]
图5a是关节结构的侧视图(原位),图5b是关节结构的侧视图(z平移),图5c是关节结构的侧视图(x平移),图5d是关节结构的侧视图(旋转)。
[0033]
图6是示出在变形例1中使用的非线性弹簧的特性的图。
[0034]
图7是示出变形例2的图。
[0035]
图8是示出变形例3的图。
[0036]
图9是示出变形例4的图。
具体实施方式
[0037]
<应用例>
[0038]
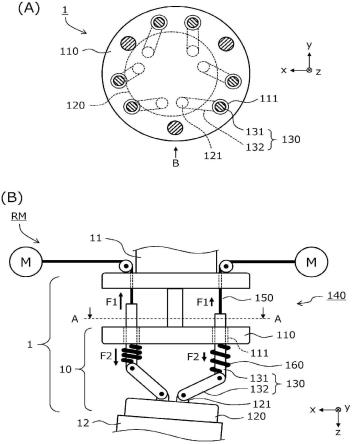
参照图1a以及图1b,对本发明的应用例之一进行说明。图1a以及图1b是具有斯图尔特平台的机器人的关节结构的示意图。图1a是图1b的a-a剖视图,图1b是侧视图(自图1a的b箭头观察)。
[0039]
该关节结构1是将构成机器人的机械手rm的第一部件11与第二部件12之间连结的装置。机械手rm为多关节的机械手,第一部件11是位于机械手rm的基端侧的部件,第二部件12是位于比第一部件11更靠前端侧的部件。
[0040]
关节结构1具有能够控制第二部件12相对于第一部件11的相对的位置及/或角度的斯图尔特平台10。斯图尔特平台具有由多个脚支承一个构件的结构,是通过使各脚的有效长度变化(通过改变各脚的有效长度的组合)而对构件赋予x方向、y方向、z方向的平移和
绕x轴、绕y轴、绕z轴的旋转的六个自由度的运动的机构。斯图尔特平台也称为运动基台(motion base)、六轴平台、六自由度平台。
[0041]
斯图尔特平台10大体具有:第一构件110,接合于第一部件11;第二构件120,接合于第二部件12;多个脚130,将第一构件110与第二构件120连接;以及驱动机构140,使各脚130的有效长度变化。脚130的数量典型而言为六个,但也可采用六个以外的构成。
[0042]
在图1b的例子中,各脚130具有使两根杆131、132弯折自如地连结而成的结构。杆131由第一构件110的轴承111支承,杆132经由万向接头121连接于第二构件120。
[0043]
在杆131的上端安装有具有可挠性的线状构件150。线状构件150被拉出到关节结构1的外侧,并连接于驱动源m。此外,与杆131同心地设置有弹性构件160。在图1的构成例中,由线状构件150和弹性构件160构成脚130的驱动机构140。
[0044]
对驱动机构140的动作进行说明。当通过驱动源m对线状构件150施加拉伸力f1时,则杆131向图1b的上方向滑动,弹性构件160逐渐发生弹性变形(压缩变形)。然后,在拉伸力f1与弹性构件160的弹性复原力f2均衡的位置,杆131的滑动停止,脚130的有效长度稳定。根据该结构,能够通过对自驱动源m赋予的线状构件150的拉伸力进行调整而简单且精度良好地控制脚130的有效长度。在机器人运行时,通过控制器(未图示)控制驱动源m来单独地调整各脚130的有效长度,从而能够任意控制第二构件120的姿态(位置/角度)。在图1b的例子中,由于对左侧的脚130的拉伸力f1大于对右侧的脚130的拉伸力f1,因此左侧的脚130比右侧的脚130短,第二构件120绕y轴旋转。
[0045]
弹性构件160也发挥作为“软性机构”的作用,该“软性机构”在对第二构件120(第二部件12)作用外力的情况下,使脚130的有效长度弹性地变化,在脱离外力的情况下,使脚130的有效长度复原。例如,如图2的右侧所示,假定为通过对第二构件120作用外力而在推举右侧的脚130的方向上施加力f3。在该情况下,通过拉伸力f1与外力f3的合力使弹性构件160进一步压缩变形,右侧的脚130的有效长度变短。由此,第一部件11与第二部件12的相对的位置及/或角度追随外力而被动地变化。然后,当外力f3消失时,则如图2的左侧所示,脚130的有效长度恢复至与拉伸力f1均衡的位置。
[0046]
驱动源m可以是线性电机或旋转电机。驱动源m可以被电性驱动或被流体压力驱动。驱动源m也可以代替对线状构件150赋予拉伸力f1,而以确定线状构件150的拉回长度的方式驱动线状构件150。在该情况下,杆131在与线状构件150的拉回长度对应的位置静止,且被弹性构件160以弹性复原力f2施力。在对杆131施加超过此时的弹性复原力f2且压缩弹性构件160的外力的情况下,杆131移动至随着将弹性构件160压缩而变大的弹性复原力f2与外力均衡为止,在驱动源m中在进行了长度方向的定位的线状构件150产生与杆131的移动对应的挠曲。该挠曲主要在线状构件150未通过后述的管中的部分产生。
[0047]
根据以上所描述的关节结构1,能够同时实现主动的多自由度控制与柔性。
[0048]
<实施方式>
[0049]
参照图3对本发明的实施方式所涉及的机器人及其关节结构进行说明。图3是示出机器人的整体构成的示意图。
[0050]
在本实施方式中,示出经由上述的具备斯图尔特平台的关节结构1而对垂直多关节机器人r的机械手rm安装有末端执行器e2的例子。只是,这只不过是一例,机器人r的构成/种类并不限于图3的例子。具体而言,机器人r只要是具备至少一个以上的机械手的机器
人,则也可以是任意的,能够应用于工业用机器人、人形机器人、护理机器人、搬送机器人、家庭用机器人、手术辅助机器人等各种各样种类的机器人。其中,工业用机器人是能够优选地应用关节结构1的机器人之一。另外,工业用机器人除垂直多关节机器人之外,还包括水平多关节机器人(scara robot)、并联连杆机器人、正交机器人等。此外,关节结构1的应用位置并不限于末端执行器e2的连结部,也可以应用于连杆彼此的连结部。
[0051]
本实施方式的机器人r具有机械手rm、控制器rc以及驱动源m作为主要构成。机械手rm具有多个连杆和将连杆彼此连结的关节(接头),是由伺服电机驱动的多关节机械手。控制器rc是控制机械手rm的伺服电机以及驱动源m的控制装置。
[0052]
经由关节结构1而在机械手rm的前端的连杆e1连结有末端执行器e2。在该例子中,连杆e1相当于图1b的第一部件11,末端执行器e2相当于图1b的第二部件12。驱动源m是用于驱动关节结构1的斯图尔特平台的驱动机构140的装置。驱动源m只要能够进行拉伸线状构件150的动作和送出的动作,则也可以为任何的种类/结构,但需要对抗弹性构件160的弹性复原力而可变更脚130的有效长度的程度的拉伸力、和能够充分确保斯图尔特平台及末端执行器e2的可动范围的程度的行程。例如,也可以使用电机、油压致动器、气压致动器等作为驱动源m。另外,可以针对各脚130设置独立的驱动源m。
[0053]
在图4以及图5a~图5d中示出关节结构1的详细情况。图4是关节结构1的立体图,图5a是关节结构1的侧视图(原位),图5b是关节结构1的侧视图(z平移),图5c是关节结构1的侧视图(x平移),图5d是关节结构1的侧视图(旋转)。在以下的说明中,以第一构件110的法线(即连杆e1的轴方向)成为z轴的方式形成关节结构1的xyz座标系。
[0054]
该关节结构1能够利用斯图尔特平台10进行末端执行器e2的六自由度的活动(x方向、y方向、z方向的平移和绕x轴、绕y轴、绕z轴的旋转)的主动的控制。
[0055]
斯图尔特平台10具有通过六个脚130将大致圆盘形状的第一构件110和大致圆盘形状的第二构件120连接而成的结构。六个脚130的结构共通。各脚130由两根杆131、132构成,杆131、132通过销接头133而弯折自如地连结。基端侧的杆131以z方向的滑动和绕z轴的旋转成为自如的方式由设置于第一构件110的贯通孔的滑动轴承111支承。另一方面,前端侧的杆132经由万向接头121连接于第二构件120,相对于第二构件120在任意方向上旋转自如。另外,杆132与第二构件120的连接也可以使用球接头。
[0056]
在杆131的基端侧的端部安装有具有可挠性的线状构件150。在本实施方式中,使用金属制的线作为线状构件150。只是,作为线状构件150,也可以使用由化学纤维、天然纤维构成的电缆(缆绳)。线状构件150被拉出到关节结构1的外侧,并连接于驱动源m。关节结构1与驱动源m之间的线状构件150的路径内至少成为曲线的部分的线状构件150通过两端的位置被固定的非伸缩性的未图示的管中,在对线状构件150施加张力的状态下,根据驱动源m中的线状构件150的位移,关节结构1中的线状构件150进行位移。
[0057]
此外,在形成于杆131的下端(销接头133侧的端部)的凸缘134与第一构件110之间,与杆131同心地设置有弹性构件160。在本实施方式中,使用螺旋弹簧(压缩弹簧)作为弹性构件160。
[0058]
控制器rc根据第二构件120的目标姿态(相对于第一构件110的相对的位置以及角度)计算六个脚130应取的有效长度和与该有效长度相对应的控制量(拉伸力、拉伸量等)。然后,当控制器rc控制驱动源m来单独地调整六个脚130的有效长度时,则第二构件120采取
目标姿态(位置/角度)。
[0059]
在此,将六个脚130的有效长度设为ll1~ll6,将最大有效长度记作llmax,将最小有效长度记作llmin。在图5a中,是ll1=ll2=ll3=ll4=ll5=ll6=llmax的状态、即将六个脚130全部设定为最大有效长度llmax的状态。在该情况下,第二构件120的xy面内的位移为0[mm](也就是说,第二构件120的中心的xy座标为(0,0)),第二构件120的旋转为0[deg]。此为标准状态(原位)。如图5b所示,当在维持ll1=ll2=ll3=ll4=ll5=ll6的状态下将六个脚130的线状构件150拉伸相同的量时,则第二构件120在保持与xy面的平行的状态下在z方向上平移。此外,当单独地调整ll1~ll6的有效长度时,则也能够如图5c所示使第二构件120在x方向或y方向上平移,或者如图5d所示使第二构件120旋转。也能够将图5a~图5d的状态进行组合,由此,可实现主动的六自由度控制。
[0060]
除了上述那样的主动的控制之外,本实施方式的关节结构1也能够进行追随外力的被动活动。例如,在图5a的状态下,假定为z方向(图中的朝向上)的力作用于第二构件120。在该情况下,在维持ll1=ll2=ll3=ll4=ll5=ll6的状态下抬起六个脚130,第二构件120可如图5b的状态那样在z方向上位移。或者,在图5b的状态下,在x方向(图中的朝向左)的力作用于第二构件120的情况下,各脚130的有效长度追随该力而变化,第二构件120可如图5c的状态那样在x方向上位移。或者,在图5b的状态下,在力矩作用于第二构件120的情况下,第二构件120可如图5d的状态那样旋转。然后,当脱离外力时,则通过弹性构件160的复原力使各脚130的有效长度恢复为原来的状态,第二构件120的姿态(位置/角度)也恢复为原来的状态(“原来的状态”是由驱动机构140的主动的控制确定的有效长度乃至姿态。)。通过这样的软性机构,末端执行器e2独立于连杆e1而运动自如,能够实现所谓的“柔性机器人”。
[0061]
在本实施方式的关节结构1中,当以比弹性构件160的弹性复原力充分大的力向上拉伸全部线状构件150时,则弹性构件160完全失效,杆131的位置被固定。此时,成为ll1=ll2=ll3=ll4=ll5=ll6=llmin,即六个脚130全部成为最小有效长度llmin。在该状态下,即使外力作用于第二构件120,第二构件120也不容易活动。即,上述的软性机构被无效化,连杆e1与末端执行器e2如一个刚体般工作。通过这样的锁定机构,能够实现末端执行器e2独立于连杆e1而成为运动自如的自由状态、与末端执行器e2被固定于连杆e1的锁定状态的切换。
[0062]
根据该结构,通过驱动机构140使斯图尔特平台10的各脚130的有效长度变化,从而能够实现连杆e1(第一部件)与末端执行器e2(第二部件)的相对的位置/角度的主动的多自由度控制。此外,在外力作用于机器人r的情况下,脚130的有效长度弹性地变化,连杆e1与末端执行器e2的相对的位置及/或角度追随外力而被动地变化。因此,能够同时实现主动的多自由度控制与柔性。
[0063]
此外,根据本实施方式的驱动机构140,在线状构件150的拉伸力与弹性构件160的弹性复原力均衡的位置,杆131的滑动停止,脚130的有效长度稳定。根据这样的结构,通过调整线状构件150的拉伸力,能够简单且精度良好地控制脚130的有效长度。
[0064]
此外,在本实施方式中,由于使线状构件150的驱动源m与关节结构1不同体,且配置在关节结构1的外部,因此能够使关节结构1本身紧凑且轻量地构成。
[0065]
此外,由于本实施方式的关节结构1具有锁定机构,因此能够切换刚性高的机器人
(锁定状态)与柔性机器人(自由状态)。例如,通过结合机器人的动作、情景适当区分使用,而可期待能够实现机器人的应用范围的扩大、有效的动作。
[0066]
此外,在本实施方式的关节结构1中,通过相同构件构成驱动机构140、软性机构和锁定机构。由此,能够实现组件件数的减少,进而实现成本降低以及装置的小型化。
[0067]
<变形例>
[0068]
上述实施方式只不过是例示性说明本发明的构成例。本发明并不限定于上述的具体方式,在其技术思想的范围内能够进行各种变形。
[0069]
在变形例1中,使用非线性弹簧部件作为弹性构件160。图6是示出线性弹簧与非线性弹簧的特性的差异的图表,横轴示出位移(挠曲),纵轴示出荷重。线性弹簧的荷重与位移成正比例的关系,不论位移如何,刚性(弹簧常数)均为一定,与此相对,非线性弹簧表现出位移越大刚性(弹簧常数)越增大的特性。这样的非线性特性例如能够通过使螺旋弹簧的圈径不均、使螺旋弹簧的节距不等间隔、使螺旋弹簧的线径不均等方法来实现。
[0070]
例如,也可以通过驱动源m的控制,将自由状态下的线状构件150的延伸量如s1[mm]、s2[mm]、s3[mm](s1<s2<s3)那样多级切换,而改变弹性构件160的位移。由此,能够控制自由状态下的关节结构1的硬度(柔性)。例如,结合机器人的动作、情景而以成为合适的硬度(柔性)的方式进行调整,从而可期待能够实现机器人的应用范围的扩大、有效的动作。
[0071]
在图7中示出变形例2。变形例2的脚、驱动机构以及软性机构的构成不同于上述实施方式。如图7所示,各脚130由杆50、供杆50滑动自如地插入的缸体构件51、设置于杆50的端部的活塞52、和配置于由活塞52与缸体构件51形成的空间的弹性构件53构成。脚130与第一构件110之间、以及脚130与第二构件120之间分别通过万向接头或球关节连接。用于驱动杆50的线状构件150被安装于活塞52,通过缸体构件51的内部以及第一构件110的贯通孔,而被拉出到关节结构1的外侧。
[0072]
在该构成中,当通过驱动源m对线状构件150施加拉伸力时,则杆50被拉回缸体构件51中,弹性构件53逐渐发生弹性变形(压缩变形)。然后,在拉伸力与弹性构件53的弹性复原力均衡的位置,杆50的滑动停止,脚130的有效长度稳定。根据该结构,也能够通过对自驱动源m赋予的线状构件150的拉伸力进行调整而简单且精度良好地控制脚130的有效长度。在该构成中,驱动源m也可以以确定线状构件150的拉回长度的方式驱动线状构件150。
[0073]
此外,弹性构件53也发挥作为软性机构的作用。例如,当在与线状构件150的拉伸力相同的方向上作用外力时,则通过拉伸力与外力的合力使弹性构件53进一步压缩变形,脚130的有效长度变化。然后,当外力消失时,则脚130的有效长度恢复至与拉伸力均衡的位置或与线状构件150的被决定的拉回长度相对应的位置。
[0074]
在图8中示出变形例3。变形例3的脚、驱动机构以及软性机构的构成不同于上述实施方式。如图8所示,各脚130由杆60、和使杆60在脚130的有效长度方向上移动的气压致动器(也称为气缸)61构成。脚130与第一构件110之间、以及脚130与第二构件120之间分别通过万向接头连接。
[0075]
在气压致动器61设置有用于对气压致动器61进行压缩性流体(例如空气)的供给/排出的两根管62。这些管62也可以被拉出到关节结构1的外侧,并连接于与关节结构1分开设置的驱动源m。这样,通过使致动器的驱动源m与关节结构1不同体,且配置在关节结构1的
外部,而能够使关节结构1本身紧凑且轻量地构成。
[0076]
在该构成中,当通过驱动源m(例如压缩机、泵等)将流体导入气压致动器61的第一室611时,则第一室611与第二室612的差压使杆60向第二室612侧移动。反之,当将流体导入第二室612时,则能够使杆60向第一室611侧移动。由此,能够简单且精度良好地控制脚130的有效长度。
[0077]
在该构成中,气压致动器61内的压缩性流体也发挥作为软性机构的作用。例如,当在压入杆60的方向上作用外力时,则气压致动器61内部的压缩性流体弹性压缩乃至弹性膨胀,脚130的有效长度变化。然后,当外力消失时,则压缩乃至膨胀的压缩性流体恢复原状,脚130的有效长度恢复为原来的状态。
[0078]
在图9中示出变形例4。变形例4是锁定机构的变形例。锁定机构大体由设置于第一构件110的第一锁定片70、和设置于第二构件120的第二锁定片71构成。为如下结构:通过缩短脚130的有效长度并使第一锁定片70与第二锁定片71卡合,而实现第一构件110与第二构件120之间的固定。
[0079]
在此,也可以设为如下结构:在第一锁定片70与第二锁定片71中的一方设置凸部,在另一方设置凹部,凸部与凹部嵌合。通过这样的嵌合方式能够提高锁定状态下的固定力。此外,也能够实现锁定状态下的第一构件110与第二构件120之间的相对定位。在图9的例子中,设置有半球形状的凸部与圆锥形状的凹部。根据该结构,由于能够使凸部与凹部以任意角度接触,因此能够以使第二构件120相对于第一构件110倾斜的姿态锁定。
[0080]
<附记1>
[0081]
(1)一种关节结构,其特征在于,将机器人的第一部件(11)与第二部件(12)之间连结,所述关节结构具有斯图尔特平台(10),该斯图尔特平台(10)能够控制所述第二部件(12)相对于所述第一部件(11)的相对的位置及/或角度,所述斯图尔特平台(10)具有:第一构件(110),接合于所述第一部件(11);第二构件(120),接合于所述第二部件(12);多个脚(130),将所述第一构件(110)与所述第二构件(120)连接;驱动机构(140),为了改变所述第二构件(120)相对于所述第一构件(110)的相对的位置及/或角度而使各脚(130)的有效长度变化;以及软性机构(160),在对所述第二构件(120)作用外力的情况下,使所述脚(130)的有效长度弹性地变化,在脱离所述外力的情况下,使所述脚(130)的有效长度复原。
[0082]
附图标记说明
[0083]
1:关节结构;10:斯图尔特平台;11:第一部件;12:第二部件;50:杆;51:缸体构件;52:活塞;53:弹性构件;60:杆;61:气压致动器;62:管;70:第一锁定片;71:第二锁定片;110:第一构件;111:轴承;120:第二构件;121:万向接头;130:脚;131:杆;132:杆;133:销接头;134:凸缘;140:驱动机构;150:线状构件;160:弹性构件;e1:连杆;e2:末端执行器;r:机器人;rm:机械手;rc:控制器;m:驱动源。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。