技术特征:
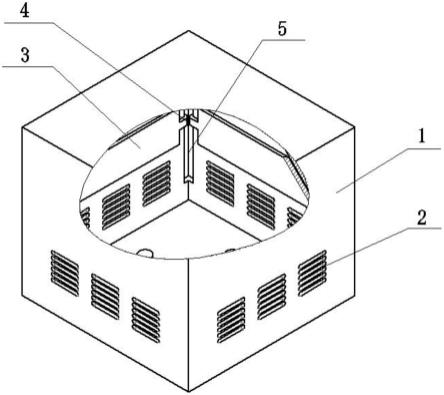
1.一种带电作业机器人基座,包括壳体(1),所述壳体(1)的侧壁上设有散热格栅孔(2),其特征在于,还包括屏蔽板(3)和驱动装置,所述屏蔽板(3)与所述壳体(1)滑动连接,所述驱动装置用于控制所述屏蔽板(3)移动,以遮蔽所述散热格栅孔(2)。2.根据权利要求1所述的带电作业机器人基座,其特征在于,所述驱动装置包括位于所述壳体(1)上的伸缩限位部(6),所述伸缩限位部(6)位于所述屏蔽板(3)的下方,在伸出状态时支撑所述屏蔽板(3),在收缩状态时所述屏蔽板(3)在重力作用下向下移动,以遮蔽所述散热格栅孔(2)。3.根据权利要求2所述的带电作业机器人基座,其特征在于,所述驱动装置还包括电磁铁(7),所述壳体(1)的侧壁上竖直设有滑槽,所述滑槽的其中一侧设有容纳槽,所述伸缩限位部(6)的一端通过弹性件连接在所述容纳槽内,所述电磁铁(7)位于所述滑槽的另一侧,所述电磁铁(7)用于控制所述伸缩限位部(6)收缩至所述容纳槽内,以避让所述屏蔽板(3)向下移动。4.根据权利要求2所述的带电作业机器人基座,其特征在于,所述壳体(1)包括底壳和上盖,所述上盖可拆卸地扣合在所述底壳上。5.根据权利要求1所述的带电作业机器人基座,其特征在于,还包括环境监测装置(8)和控制器,所述控制器分别与所述环境监测装置(8)和所述驱动装置连接,所述环境监测装置(8)用于监测所述壳体(1)所处环境的温湿度和/或粉尘浓度信息,所述控制器用于当所述环境监测装置(8)监测的环境信息达到预设阈值时,给所述驱动装置发送控制所述屏蔽板(3)下移的控制信号。6.根据权利要求1至5任一项所述的带电作业机器人基座,其特征在于,所述壳体(1)为多棱柱结构,所述壳体(1)的每个侧面分别设有所述散热格栅孔(2),所述壳体(1)的每个侧面分别滑动连接有一块所述屏蔽板(3),所述壳体(1)的每个竖棱的内侧竖直设有导向槽(5),所述屏蔽板(3)的两侧设有与所述导向槽(5)滑动连接的滑块(4)。7.根据权利要求1至5任一项所述的带电作业机器人基座,其特征在于,所述壳体(1)为圆柱体结构,所述壳体(1)的周侧设有所述散热格栅孔(2),所述屏蔽板(3)为圆筒形结构,所述屏蔽板(3)滑动连接在所述壳体(1)的内侧壁上。8.根据权利要求1所述的带电作业机器人基座,其特征在于,所述驱动装置为控制所述屏蔽板(3)上下移动的直线位移动力装置。9.根据权利要求2所述的带电作业机器人基座,其特征在于,所述伸缩限位部(6)为梯形块,所述梯形块上外端的斜面向下。10.一种带电作业机器人,其特征在于,包括权利要求1至9任一项所述的带电作业机器人基座。
技术总结
本申请公开了一种带电作业机器人及其基座,包括壳体,壳体的侧壁上设有散热格栅孔,还包括屏蔽板和驱动装置,屏蔽板与壳体滑动连接,在环境良好的情况下,壳体内部通过散热格栅孔与外界处于连通状态,以便于基座的散热;当环境恶劣时,驱动装置控制屏蔽板移动,以遮蔽散热格栅孔,从而密封壳体,进而防止外界的异物进入到壳体内部,以影响壳体内设备的正常工作。工作。工作。
技术研发人员:熊小雨 周荣亮 包月华 张俊婷 朱亦橙 马蔡国 刘志欢 方斌
受保护的技术使用者:杭州凯达电力建设有限公司
技术研发日:2022.06.20
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。