门的控制系统、门把手装置、门的控制装置以及控制方法
1.本发明为下述申请的分案申请,原申请信息如下:
2.申请日:2019年3月5日
3.申请号:201980054219.0
4.发明名称:控制系统、门把手装置、控制装置以及控制方法
技术领域
5.本发明涉及门的控制系统、门把手装置、门的控制装置以及控制方法。
背景技术:
6.以往,提出了如下技术:通过传感器来感测用户与车辆的门把手的接触,并根据从传感器输出的感测信号来控制车辆的门的动作。
7.例如,在下述专利文献1中公开了如下技术:在由设于车辆滑动门的门把手的触控传感器感测到与门把手接触的情况下,通过车辆侧单元来控制车辆滑动门的开门动作。
8.此外,在下述专利文献2中公开了如下技术:在由设于车辆的门把手的容量传感器感测到用户的手指接触到门把手的情况下,通过控制装置来对车辆进行锁定或开锁。
9.现有技术文献
10.专利文献
11.专利文献1:日本特开2007-23620号公报
12.专利文献2:日本特开2013-511635号公报
技术实现要素:
13.发明所要解决的问题
14.但是,上述专利文献1的技术中,在触控传感器感测到意外地接触的情况下,车辆滑动门恐怕会进行误动作。
15.用于解决问题的方案
16.一实施方式的控制系统具备:接触感测构件,感测操作体与门把手的接触;力感测构件,感测由操作体对门把手施加的力;以及控制构件,在由接触感测构件感测到接触并且由力感测构件感测到力的情况下,进行门的开闭控制。
17.发明效果
18.根据一实施方式,在能够基于来自传感器的信息而进行门的开闭控制的控制系统中,能够抑制门的开闭动作的误动作。
附图说明
19.图1为表示一实施方式的门把手装置的外观的立体图。
20.图2为一实施方式的门把手装置的主视图。
21.图3为一实施方式的门把手装置的后视图。
22.图4为一实施方式的门把手装置的俯视图。
23.图5为表示一实施方式的门把手装置(卸下第二壳体部后的状态)的外观的立体图。
24.图6为一实施方式的门把手装置(卸下第二壳体部后的状态)的主视图。
25.图7为从一实施方式的门把手装置(卸下第二壳体部后的状态)的前方观察的立体图。
26.图8为表示一实施方式的门把手装置中的第二壳体部的背面侧的构成的图。
27.图9为表示一实施方式的金属轴的连接构成的部分放大图。
28.图10为表示一实施方式的金属轴中的应力的产生方向的图。
29.图11为表示一实施方式的门把手装置的控制构成的框图。
30.图12为表示由一实施方式的控制模块实现的处理顺序的流程图。
具体实施方式
31.以下,参照附图对一实施方式加以说明。
32.〔门把手装置100的概要〕
33.图1为表示一实施方式的门把手装置100的外观的立体图。图2为一实施方式的门把手装置100的主视图。图3为一实施方式的门把手装置100的后视图。图4为一实施方式的门把手装置100的俯视图。
34.另外,在以下的说明中,为了方便,将图中z轴方向(与车辆的高度方向对应的方向)设为上下方向,将图中y轴方向(与车辆的宽度方向对应的方向)设为横宽方向,将图中x轴方向(与车辆的长度方向对应的方向)设为前后方向。
35.图1~图4所示的门把手装置100例如是用于通过嵌入到形成于车辆的门的内板(省略图示)的、与该门把手装置100大致相同形状的开口部,从而与内板一体化,并使基于用户的车辆的门的开闭操作能够进行的装置。
36.如图1~图4所示,门把手装置100具备主体100a。主体100a是形成门把手装置100的整体的外形的零件。主体100a例如由abs树脂、pc树脂等树脂材料形成。主体100a具有基板部101、门把手壳体部102以及门把手103,该多个构成部一体地形成。
37.基板部101是支承门把手壳体部102以及门把手103并且被固定于车辆的门的平板状的部分。门把手壳体部102是相对于基板部101重叠地设于车厢侧并且结合于基板部101的平板状的部分。门把手壳体部102是在门把手装置100嵌入到车辆的门的内板的状态下露出至车厢侧的部分。
38.门把手103是具有沿前后方向(图中x轴方向)呈直线状延伸的中空的板形状,并且在被用户的手抓持的状态下供由基于用户的手的操作(车辆的门的开闭操作以及车辆的锁定机构的解锁操作以及上锁操作)进行的部分。门把手103的后端部(图中x轴负侧的端部)与门把手壳体部102相连并且该门把手103与门把手壳体部102一体地形成。门把手103为非可动式,通过被用户施加操作力而产生些许挠曲的程度的变形。
39.另外,主体100a在门把手103的周围具有朝向车外侧(图中y轴负侧)凹陷的形状的凹部104。由此,门把手装置100能够使用户的手绕进门把手103的背面侧,因此,能够通过用户的手容易地抓持门把手103的正面(车厢侧的侧面)以及背面(车外侧的侧面)这双方。
40.〔门把手装置100的内部构成〕
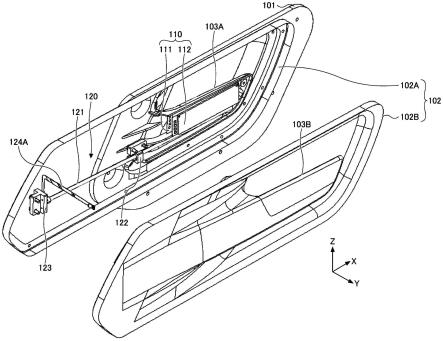
41.图5为表示一实施方式的门把手装置100(卸下第二壳体部102b后的状态)的外观的立体图。图6为一实施方式的门把手装置100(卸下第二壳体部102b后的状态)的主视图。图7为从一实施方式的门把手装置100(卸下第二壳体部102b后的状态)的前方观察的立体图。
42.如图5所示,主体100a的门把手壳体部102被构成为能够分割成车外侧的第一壳体部102a和车厢侧的第二壳体部102b。第一壳体部102a被固定于基板部101。此外,门把手壳体部102具有中空构造。如图5所示,对于门把手壳体部102,能够通过从第一壳体部102a卸下第二壳体部102b而露出内部空间。
43.另外,门把手103跨设于第一壳体部102a以及第二壳体部102b。因此,如图5所示,在第一壳体部102a以及第二壳体部102b彼此分割的情况下,门把手103被分割成与第一壳体部102a一体地设置的第一把手部103a和与第二壳体部102b一体地设置的第二把手部103b。
44.如图5~图7所示,在门把手壳体部102的内部空间设有接触感测单元110以及力感测单元120。
45.接触感测单元110是“接触感测构件”的一个例子。接触感测单元110具备第一静电传感器111以及第二静电传感器112。第一静电传感器111以及第二静电传感器112均为薄型的平板状且在从y轴方向观察的平面视图下具有横长的长方形状。第一静电传感器111以及第二静电传感器112在门把手103的内部在y轴方向彼此重叠地设置。
46.第一静电传感器111是“第一接触感测部”的一个例子。第一静电传感器111在门把手103的内部设于门把手103的背面(图中y轴负侧的侧面)侧,感测操作体与门把手103的背面的接触。具体地讲,第一静电传感器111具有检测电极,在操作体接触到门把手103的背面时,将对应于操作体与检测电极间的静电容量的电流值作为第一接触感测信号输出。
47.第二静电传感器112是“第二接触感测部”的一个例子。第二静电传感器112在门把手103的内部设于门把手103的正面(图中y轴正侧的侧面)侧,感测操作体与门把手103的正面的接触。具体地讲,第二静电传感器112具有检测电极,在操作体接触到门把手103的正面时,将对应于操作体与检测电极间的静电容量的电流值作为第二接触感测信号输出。
48.力感测单元120具备金属轴121、支架(holder)122、传感器基座123以及应变仪124。另外,应变仪124连接于金属轴121的后端部,在该状态下难以从外部辨识,因此,在图7中用虚线来表示。另外,关于应变仪124的具体构成,将使用图9在后面加以记述。
49.金属轴121是“传递构件”的一个例子。金属轴121是在门把手壳体部102的内部空间沿前后方向(图中x轴方向)呈直线状延伸的金属制且棒状的部件。金属轴121被设为用于向应变仪124传递施加于门把手103的力。金属轴121的中间部分被支架122支承,比该中间部分靠前端侧(图中x轴正侧)的部分配置于门把手103的内部。由此,施加于门把手103的力被传递至金属轴121的前端侧的部分,在金属轴121的前端侧的部分产生应力。并且,在金属轴121的前端侧的部分产生的应力经由支点(支架122)被传递至金属轴121的后端侧的部分。进而,被传递至金属轴121的后端侧的部分的应力向连接于该部分的应变仪124传递。另外,在本实施方式中,使用圆棒来作为金属轴121,但并不限于此。
50.支架122是通过对金属轴121的中间部分进行支承来作为金属轴121的支点发挥功
能的部件。具体地讲,如图8所示,支架122被固定于第二壳体部102b的背面(第二把手部103b的后端部附近的位置)。此外,如图7以及图8所示,在支架122形成有贯通孔122a,该贯通孔122a沿前后方向(图中x轴方向)贯通该支架122,并且具有圆形的开口形状。贯通孔122a具有与金属轴121的外径大致相同尺寸的内径。并且,如图5~图8所示,金属轴121将贯通孔122a贯通,由此,支架122在贯通孔122a的内周面与金属轴121的外周面紧密贴合的状态下对金属轴121的中间部分进行支承。由此,支架122能够不产生金属轴121的晃动(日语:
かたつき
)地对金属轴121的中间部分进行支承。
51.传感器基座123是对应变仪124进行支承的部件。具体地讲,如图8所示,传感器基座123被固定于第二壳体部102b的背面的、比金属轴121的后端面(图中x轴负侧的端面)靠后方(图中x轴负方向)的位置。并且,传感器基座123在与金属轴121的后端面对置的表面123a旋紧(日语:
ネジ
止
め
)固定有应变仪124。由此,传感器基座123以应变仪124连接于金属轴121的后端部从而应变仪124能够感测传递至金属轴121的后端部的应力的方式对应变仪124进行支承。
52.应变仪124是“力感测构件”的一个例子。应变仪124感测施加于门把手103的力。具体地讲,应变仪124与金属轴121的后端面对置地设置。在力被施加于门把手103时,应变仪124受到传递至金属轴121的后端部的应力,产生金属电阻材料的应变,从而电阻值发生变化。由此,应变仪124经由fpc(flexible printed circuits:柔性电路板)124a将在该应变仪124产生的应变的方向以及载荷所对应的电压值作为表示施加于门把手103的力的力感测信号输出。另外,应变仪124能够分别感测该应变仪124的y轴方向以及z轴方向的应变,由此,能够分别感测施加于门把手103的y轴方向(车宽方向。“第一方向”以及“第二方向”的一个例子)的力和施加于门把手103的z轴方向(上下方向。“第三方向”的一个例子)的力。作为应变仪124,例如,可以使用与指点设备(pointing stick)等相同的构造。
53.图8为表示一实施方式的门把手装置100的第二壳体部102b的背面侧的构成的图。如图8所示,在第二壳体部102b的第二把手部103b的背面形成有支架部103c。在支架部103c形成有贯通孔103d,该贯通孔103d沿前后方向(图中x轴方向)贯通该支架部103c,并且具有圆形的开口形状。贯通孔103d具有与金属轴121的外径大致相同尺寸的内径。金属轴121将贯通孔103d贯通,由此,支架部103c在贯通孔103d的内周面紧密贴合于金属轴121的外周面的状态下对金属轴121的前端侧的部分进行支承。由此,施加于门把手103的力经由支架部103c被传递至金属轴121的前端侧的部分。
54.〔金属轴121的连接构成〕
55.图9为表示一实施方式的金属轴121的连接构成的部分放大图。如图9所示,在金属轴121的后端部设有圆筒状的接合部121a。接合部121a在应变仪124侧的端面具有圆形的开口121b。金属轴121通过在接合部121a所具有的开口121b内嵌入具有圆形状的外形的应变仪124而连接于应变仪124,从而能够将施加于门把手103的力传递至应变仪124。
56.如图9所示,本实施方式的力感测单元120还具备弹性部件125。弹性部件125使用橡胶、硅等弹性材料来形成。弹性部件125具有贯通孔125a,该贯通孔125a沿前后方向贯通该弹性部件125,并且具有矩形的开口形状。在贯通孔125a嵌于应变仪124所具有的突起124b的状态下,弹性部件125与应变仪124一起嵌入接合部121a。由此,本实施方式的力感测单元120能够经由弹性部件25将施加于门把手103的力传递至应变仪124。因此,本实施方式
的力感测单元120例如能够通过弹性部件125来吸收金属轴121的接合部121a处的组装误差、由车辆的振动引起的金属轴121的位移、金属轴121的过度位移等。因此,根据本实施方式的力感测单元120,能够抑制应变仪124进行的过渡检测。另外,在应变仪124处设有由弹性材料构成的盖(cap)的情况下,也可以是使用该帽来作为弹性部件125。
57.〔金属轴121中的应力的产生方向〕
58.图10为表示一实施方式的金属轴121中的应力的产生方向的图。如图10所示,金属轴121在中间部分被支架122支承,由此,在中间部分具有支点。因此,若对门把手103施加力,则在金属轴121的比支架122靠前端侧的部分,在与施加于门把手103的力的方向相同的方向产生应力,在金属轴121的比支架122靠后端侧的部分,在与施加于门把手103的力的方向相反的方向产生应力。
59.例如,若对门把手103向车厢方向施加力,则如图10所示,在金属轴121的比支架122靠前端侧的部分,向车厢方向d1a产生应力,与此相反,在金属轴121的比支架122靠后端侧的部分,向车外方向d1b产生应力。该情况下,应变仪124产生朝向车外方向d1b的应变,并且能够将该朝向车外方向d1b的应变所对应的力感测信号作为表示对门把手103向车厢方向施加了力的力感测信号而输出。
60.此外,例如,若对门把手103向车外方向施加力,则如图10所示,在金属轴121的比支架122靠前端侧的部分,向车外方向d2a产生应力,与此相反,在金属轴121的比支架122靠后端侧的部分,向车厢方向d2b产生应力。该情况下,应变仪124产生朝向车厢方向d2b的应变,并且能够将该朝向车厢方向d2b的应变所对应的力感测信号作为表示对门把手103向车外方向施加了力的力感测信号而输出。
61.此外,例如,若对门把手103向下方施加力,则如图10所示,在金属轴121的比支架122靠前端侧的部分,向下方d3a产生应力,与此相反,在金属轴121的比支架122靠后端侧的部分,向上方d3b产生应力。该情况下,应变仪124产生朝向上方d3b的应变,并且能够将该朝向上方d3b的应变所对应的力感测信号作为表示对门把手103向下方施加了力的力感测信号而输出。
62.此外,例如,若对门把手103向上方施加力,则如图10所示,在金属轴121的比支架122靠前端侧的部分,向上方d4a产生应力,与此相反,在金属轴121的比支架122靠后端侧的部分,向下方d4b产生应力。该情况下,应变仪124产生朝向下方d4b的应变,并且能够将该朝向下方d4b的应变所对应的力感测信号作为表示对门把手103向上方施加了力的力感测信号而输出。
63.另外,本实施方式的力感测单元120能够通过改变金属轴121上的支架122(即,支点)的位置来调整应变仪124的检测灵敏度。例如,本实施方式的力感测单元120能够通过将支架122设于金属轴121的更后端侧来使金属轴121的后端部处的位移更小,因此,能够更加降低应变仪124的检测灵敏度。相反,本实施方式的力感测单元120能够通过将支架122设于金属轴121的更前端侧来使金属轴121的后端部处的位移更大,因此,能够更加提高应变仪124的检测灵敏度。
64.〔控制系统10的控制构成〕
65.图11为表示一实施方式的门把手装置100的控制构成的框图。如图11所示,控制系统10具备门把手装置100以及控制模块130。
66.控制模块130是“控制构件”以及“控制装置”的一个例子。控制模块130具有第一获取部131、第二获取部132以及控制部133。
67.第一获取部131从第一静电传感器111获取表示操作体已与门把手103的背面接触的第一接触感测信号(与静电容量相应的电流值)。此外,第一获取部131从第二静电传感器112获取表示操作体已与门把手103的正面接触的第二接触感测信号(与静电容量相应的电流值)。
68.第二获取部132从应变仪124获取表示由操作体对门把手103施加了力的力感测信号(与应变的方向以及载荷相应的电压值)。
69.控制部133基于由第一获取部131获取到第一接触感测信号以及第二接触感测信号和由第二获取部132获取到的力感测信号,对车辆的门的开闭动作以及车辆的锁定机构的动作(解锁动作以及上锁动作)进行控制。
70.具体地讲,在由第一获取部131获取到第一接触感测信号以及第二接触感测信号这双方并且由第二获取部132获取到力感测信号的情况下,控制部133根据通过由第二获取部132获取到的力感测信号确定的、施加于门把手103的力的方向,对车辆的门的开闭动作或车辆的锁定机构的动作(解锁动作或上锁动作)进行控制。
71.即,在用户的手与门把手103的两面(正面以及背面)接触并且由用户的手对门把手103施加了力的情况下,控制部133对车辆的门的开闭动作或车辆的锁定机构的动作(解锁动作或上锁动作)进行控制。
72.例如,在由力感测信号确定的施加于门把手103的力的方向为车外方向(图中y轴负方向)的情况下,控制部133进行车辆的门的打开动作控制。例如,在车辆的门处于关闭的状态时,控制部133进行打开动作控制以使车辆的门进行自动地打开的动作。此外,例如,在车辆的门正在进行自动地关闭的动作时,控制部133以停止该动作的方式进行打开动作控制。
73.此外,例如,在由力感测信号确定的施加于门把手103的力的方向为车厢方向(图中y轴正方向)的情况下,控制部133进行车辆的门的关闭动作控制。例如,在车辆的门打开的状态时,控制部133进行关闭动作控制以使车辆的门进行自动地关闭的动作。此外,例如,在车辆的门正在进行自动地打开的动作时,控制部133进行关闭动作控制以停止该动作。
74.在此,例如,控制部133对控制车辆的门的开闭机构(例如,马达等)的控制单元(省略图示)发送控制信号,由此,使控制单元进行车辆的门的开闭动作的控制。不过,并不限于此,也可以是,控制部133通过对车辆的门的开闭机构发送控制信号来直接地控制车辆的门的开闭动作。
75.此外,例如,在由力感测信号确定的施加于门把手103的力的方向为下方(图中z轴负方向)的情况下,控制部133进行车辆的锁定机构的上锁控制。例如,在车辆的锁定机构已解锁的状态时,控制部133进行上锁控制以使车辆的锁定机构自动地上锁。
76.此外,例如,在由力感测信号确定的施加于门把手103的力的方向为上方(图中z轴正方向)的情况下,控制部133进行车辆的锁定机构的解锁控制。例如,在车辆的锁定机构已上锁的状态时,控制部133进行解锁控制以使车辆的锁定机构自动地解锁。
77.在此,例如,控制部133对控制车辆的锁定机构(例如,马达等)的控制单元(省略图示)发送控制信号,由此使控制单元进行车辆的锁定机构的动作的控制。不过,并不限于此,
也可以是,控制部133通过对车辆的锁定机构发送控制信号来直接地控制车辆的锁定机构的动作。
78.另外,在本实施方式的门把手装置100中,第一静电传感器111以及第二静电传感器112分别具有沿前后方向排列配置的多个(例如,四个)检测电极,多个检测电极分别被构成为能够输出接触检测信号。据此,也可以是,控制部133在从第一静电传感器111所具备的规定数量以上(例如,两个以上)的检测电极获取到第一接触检测信号,从第二静电传感器112所具备的规定数量以上(例如,两个以上)的检测电极获取到第二接触检测信号并且从应变仪124获取到力感测信号的情况下,控制车辆的门的开闭动作或车辆的锁定机构的动作(解锁动作或上锁动作)。
79.此外,也可以是,控制部133在由应变仪124感测到对门把手103施加了朝向上下方向的力的情况下,取代进行车辆的锁定机构的控制而进行其他控制(例如,车辆的电动车窗的控制)。在该情况下,例如,也可以是,在由应变仪124感测到对门把手103施加了朝向上方向的力的情况下,进行关闭电动车窗的控制,相反地,在由应变仪124感测到对门把手103施加了朝向下方向的力的情况下,进行打开电动车窗的控制。
80.另外,控制模块130被构成为例如具备cpu(central processing unit:中央处理单元)、rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)以及外部i/f(inter face:接口)等。并且,例如,控制模块130通过由cpu执行存储于rom的程序来实现图11所示的各功能。作为控制模块130,例如,可以使用微型计算机。
81.〔由控制模块130实现的处理顺序〕
82.图12为表示由一实施方式的控制模块130实现的处理顺序的流程图。
83.首先,判断第一获取部131是否从第一静电传感器111获取到了第一接触感测信号(步骤s201)。在步骤s201中判断为未获取到第一接触感测信号的情况下(步骤s201:否),控制模块130结束图12所示的一系列处理。
84.另一方面,在步骤s201中判断为获取到了第一接触感测信号的情况下(步骤s201:是),判断第一获取部131是否从第二静电传感器112获取到了第二接触感测信号(步骤s202)。在步骤s202中判断为未获取到第二接触感测信号的情况下(步骤s202:否),控制模块130结束图12所示的一系列处理。
85.另一方面,在步骤s202中判断为获取到了第二接触感测信号的情况下(步骤s202:是),判断第二获取部132是否从应变仪124获取到了力感测信号(步骤s203)。在步骤s203中判断为未获取到力感测信号的情况下(步骤s203:否),控制模块130结束图12所示的一系列处理。
86.另一方面,在步骤s203中判断为获取到了力接触感测信号的情况下(步骤s203:是),控制部133基于由第二获取部132获取到的力感测信号来判断施加于门把手103的力的方向是否是车外方向(步骤s204)。
87.在步骤s204中判断为施加于门把手103的力的方向是车外方向的情况下(步骤s204:是),控制部133进行车辆的门的打开动作控制(步骤s205)。然后,控制模块130结束图12所示的一系列处理。
88.另一方面,在步骤s204中判断为施加于门把手103的力的方向不是车外方向的情况下(步骤s204:否),控制部133基于由第二获取部132获取到的力感测信号来判断施加于
门把手103的力的方向是否是车厢方向(步骤s206)。
89.在步骤s206中判断为施加于门把手103的力的方向是车厢方向的情况下(步骤s206:是),控制部133进行车辆的门的关闭动作控制(步骤s207)。然后,控制模块130结束图12所示的一系列处理。
90.另一方面,在步骤s206中判断为施加于门把手103的力的方向不是车厢方向的情况下(步骤s206:否),控制部133基于由第二获取部132获取到的力感测信号来判断施加于门把手103的力的方向是否是下方(步骤s208)。
91.在步骤s208中判断为施加于门把手103的力的方向是下方的情况下(步骤s208:是),控制部133进行车辆的门的上锁控制(步骤s209)。然后,控制模块130结束图12所示的一系列处理。
92.另一方面,在步骤s208中判断为施加于门把手103的力的方向不是下方的情况下(0步骤s208:否),控制部133基于由第二获取部132获取到的力感测信号来判断施加于门把手103的力的方向是否是上方(步骤s210)。
93.在步骤s210中判断为施加于门把手103的力的方向是上方的情况下(步骤s210:是),控制部133进行车辆的门的解锁控制(步骤s211)。然后,控制模块130结束图12所示的一系列处理。
94.另一方面,在步骤s210中判断为施加于门把手103的力的方向不是上方的情况下(步骤s210:否),控制模块130结束图12所示的一系列处理。
95.如以上说明的那样,本实施方式的控制系统10具备:接触感测单元110,感测用户的手(操作体)与门把手103的接触;应变仪124,感测由用户的手对门把手103施加的力;以及控制模块130,在由接触感测单元110感测到与门把手103的接触并且由应变仪124感测到对门把手103施加的力的情况下,进行门的开闭控制。因此,本实施方式的控制系统10即使在与门把手103发生意外地接触的情况下,只要未同时感测到对门把手103施加了力,就不进行门的开闭控制。因此,根据本实施方式的控制系统10,能够抑制门的开闭动作的误动作。
96.此外,本实施方式的控制系统10具有棒状的金属轴121,该金属轴121设于门把手103,在一端部与另一端部之间具有支架122(支点),将在一端部被施加的力传递至另一端部,应变仪124采用感测传递至金属轴121的另一端部的力的构成。因此,本实施方式的控制系统10无需将门把手103设为可动式就能够更可靠地感测施加于门把手103的力。此外,本实施方式的控制系统10能够通过金属轴121的设计(例如,长度、直径、支点的位置、材质等)的变更,容易地将由应变仪124实现的检测灵敏度调整为与要求规格相应的适当的检测灵敏度。
97.此外,本实施方式的控制系统10中,接触感测单元110具有配置于门把手103的正面及背面的第一静电传感器111和第二静电传感器112,控制模块130在由第一静电传感器111以及第二静电传感器112分别感测到门把手103的接触并且由应变仪124感测到施加于门把手103的力的情况下,进行门的开闭控制。因此,本实施方式的控制系统10能够在用户抓持门把手103而使手与第一静电传感器111以及第二静电传感器112分别接触的情况下,进行门的开闭控制。即,对于本实施方式的控制系统10,如果仅第一静电传感器111或第二静电传感器112中的某一方感测到门把手103的接触,则不进行门的开闭控制。因此,根据本
实施方式的控制系统10,能够抑制门的开闭动作的误动作。
98.此外,在本实施方式的控制系统10中,控制模块130在由应变仪124感测到相对于门把手103的朝向车外侧的力(朝向与打开门的方向对应的第一方向的力)的情况下,进行门的打开控制,在由应变仪124感测到相对于门把手103的朝向车厢侧的力(朝向与关闭门的方向对应的第二方向的力)的情况下,进行门的关闭控制。因此,根据本实施方式的控制系统10,能够通过相对于门把手103的直觉地用户操作来进行门的开闭控制。
99.此外,本实施方式的控制系统10能够通过应变仪124来感测施加于门把手103的朝向上下方向的力。并且,本实施方式的控制系统10能够在感测到施加于门把手103的朝向上下方向的力的情况下,通过控制模块130来进行车辆的锁定机构的上锁以及解锁的控制。因此,根据本实施方式的控制系统10,能够通过比较简易的构成来感测用于门的开闭动作的用户操作和用于车辆的锁定机构的控制的用户操作这双方,并进行门的开闭的控制和车辆的锁定机构的控制这双方。
100.以上,对本发明的一实施方式进行了详述,但本发明并不限定于这些实施方式,在权利要求书所记载的本发明的主旨的范围内,能够进行各种变形或变更。
101.例如,在上述实施方式中,对将本发明应用于沿前后方向延伸并且后端部与门把手壳体部102相连的门把手103的例子进行了说明,但并不限于此,本发明也可以应用于前端部与门把手壳体相连的门把手、前端部以及后端部分别与门把手壳体相连的门把手、沿上下方向延伸的门把手等。此外,本发明也可以应用于铰链式、滑动式、鸥翼式等各种形式的门。此外,本发明也可以应用于车厢侧的门把手、车外侧的门把手的任一个。此外,本发明也可以应用于车辆的门以外的门。在任何情况下,优先在与门的开闭方向对应的方向对门把手施加了力的情况下进行门的开闭控制。例如,在将后方设为开方向的滑动门中,在对沿上下方向延伸的门把手应用了本发明的情况下,可以在感测到相对于门把手的朝向后方的力时控制滑动门的打开动作,在感测到相对于门把手的朝向前方的力时控制滑动门的关闭动作。
102.此外,在上述实施方式中,可以上下并列地设置两组力感测单元120,通过控制部133,基于从一方的力感测单元120的应变仪124(第一应变仪)输出的力感测信号和从另一方的力感测单元120的应变仪124(第二应变仪)输出的力感测信号来感测门把手103的扭转。并且,控制部133可以在感测到门把手103的扭转的情况下,根据该扭转的方向来进行车辆的门的控制(例如,门的锁定机构的控制、电动车窗的控制等)。例如,在对门把手103施加了扭转的情况下,一方的应变仪124的力感测信号与另一方的应变仪124的力感测信号表示在左右方向上彼此不同的方向。因此,控制部133能够在由第二获取部132获取到这样的力检测信号2的情况下感测门把手103的扭转。
103.此外,在上述实施方式的控制系统10中,可以进一步设置通过公知的认证方法进行用户所持的智能钥匙的认证的认证构件,控制部133除了进行与门把手103的接触的感测以及对门把手103施加了力的感测以外,在由认证构件执行的智能钥匙的认证成功了的情况下,进行门的控制。
104.此外,在上述实施方式的控制系统10中,可以进一步设置在开始门的开闭控制时,通过声音、光、振动等向用户通知门的开闭控制的开始的通知构件。
105.另外,在互相不矛盾的情况下,能够对实施例彼此进行组合,并且能够对不同的实
施例中的特征彼此进行组合。
106.附图标记说明
107.10控制系统
108.100门把手装置
109.100a主体
110.101基板部
111.102门把手壳体部
112.102a第一壳体部
113.102b第二壳体部
114.103门把手
115.103a第一把手部
116.103b第二把手部
117.104凹部
118.110接触感测单元(接触感测构件)
119.111第一静电传感器(第一接触感测部)
120.112第二静电传感器(第二接触感测部)
121.120力感测单元
122.121金属轴(传递构件)
123.122支架(支点)
124.123传感器基座
125.124应变仪(力感测构件)
126.130控制模块(控制构件,控制装置)
127.131第一获取部
128.132第二获取部
129.133控制部
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
