1.本发明属于电力安全生产技术领域,具体涉及一种基于仿真的吊车监测方法及系统。
背景技术:
2.随着电力物联的推广应用,变电站现场工作对运维人员及现场工作人员的安全性和控制应答响应提出了更高要求,尤其针对变电站吊车作业安全监管问题。
3.安全生产是电力行业的重中之重,在电力安全生产管理中,对现场作业安全的控制管理,一直是各级单位安全控制管理的重要内容之一。为保证安全作业生产,工作和试验现场都需要进行有效的安全围界管理。目前,电力作业现场的安全围界工作主要采用传统的安全遮拦和围栏作为围界手段,由于老旧设备多,大型工作现场较多,而运维人员少,工作量矩阵,操作任务繁重,员工的安全性受到严重考验,现有的识别装置采用电子围栏的方式并不能准确定位到人员所在的位置,无法进行高准确率地识别人员所在位置的安全性。在变电站进行基础设置建设或部分间隔停电检修时,需要用到吊车等设备进行辅助工作。在吊车工作时,会有旁边间隔带电的情况发生。而吊车斗臂在旋转移动的过程中,按照《国家电网公司电力工作安全规程》的相关规定,应保持一定的安全距离。在实际操作过程中,没有相应的测量措施,只能依靠现场指挥人员目测安全距离来提醒吊车司机,单纯依靠人力容易发生吊车及吊臂上的物品与带电设备及母线的距离小于安全距离的情况,导致安全生产事故的发生。
技术实现要素:
4.为了克服上述技术缺陷,本发明提供了一种基于仿真的吊车监测方法,实时监测吊车的工作状态并进行仿真,对吊车操作的安全性进行监控,保证现场人身安全和设备安全。
5.为了解决上述问题,本发明按以下技术方案予以实现的:
6.一种基于仿真的吊车监测方法,所述方法包括如下步骤:
7.对吊车进行三维模型建模;
8.实时获取吊车的工作数据;
9.结合吊车的三维模型和工作数据,对吊车的工作状态进行仿真。
10.进一步的,步骤对吊车进行三维模型建模,包括如下步骤:
11.设定吊车的型号、第一装置的安装位置和第二装置的安装位置;
12.根据吊车的型号,获取吊车各个活动机构的尺寸和位置关系;
13.根据吊车各个活动机构的尺寸和位置关系,进行一比一三维模型建模。
14.进一步的,步骤实时获取吊车的工作数据,包括如下步骤:
15.通过第一装置,实时获取吊车位置和吊车吊臂的转向角;
16.通过第一装置和第二装置,实时获取吊车吊臂的工作长度。
17.进一步的,所述转向角包括:俯仰角、横滚角及偏航角。
18.进一步的,步骤结合吊车的三维模型和工作数据,对吊车的工作状态进行仿真,包括如下步骤:
19.根据第一装置的安装位置、第二装置的安装位置、实时获取到吊车位置和吊车吊臂的转向角、实时获取的吊车吊臂的工作长度,确定吊车及吊车吊臂的一个姿态;
20.通过采集多组吊车吊臂的转向角、吊车吊臂的工作长度,得到吊车及吊车吊臂的多个姿态;
21.将多个姿态结合吊车的三维模型,对吊车的工作状态进行仿真。
22.进一步的,步骤结合吊车的三维模型和工作数据,对吊车的工作状态进行仿真,还包括步骤:
23.根据高压线安全距离及设备安全距离,在吊车的三维模型中设置安全禁区;
24.对吊车的工作状态进行仿真时,判断吊车是否触碰到安全禁区。
25.与现有技术相比,本发明具有以下有益效果:
26.本发明公开了一种基于仿真的吊车监测方法,通过对吊车进行三维建模和获取吊车实时工作数据,对吊车的工作状态进行监视并仿真,监控吊车操作的安全性,保证现场人身安全和设备安全。
27.本发明还公开了一种基于仿真的吊车监测系统,包括第一装置、第二装置和终端,
28.所述第一装置包括:
29.定位模块,用于实时获取吊车位置;
30.激光测距模块,用于实时获取吊臂的工作长度;
31.转向角监测模块,用于实时获取吊臂的转向角信息;
32.输入模块,用于设定吊车的型号和尺寸,设定第一装置的位置和第二装置的位置;
33.数据传输模块,用于将获取到的数据信息传输到终端;
34.所述第二装置包括激光标靶模块,所述激光标靶模块用于配合所述激光测距模块获取吊臂的工作长度;
35.终端,用于根据接收到的数据信息,进行仿真
36.进一步的,还包括固定装置,所述第一装置通过所述固定装置固定在吊车吊臂底端,所述第二装置通过所述固定装置固定在吊车吊臂顶端。
37.进一步的,所述第一装置还包括液晶显示屏,用于显示获取到的的吊臂的工作长度及吊臂的转向角信息。
38.进一步的,所述第一装置还包括电源装置,用于向所述激光测距模块、数据传输模块、转向角监测模块及液晶显示屏供电。
附图说明
39.下面结合附图对本发明的具体实施方式作进一步详细的说明,其中:
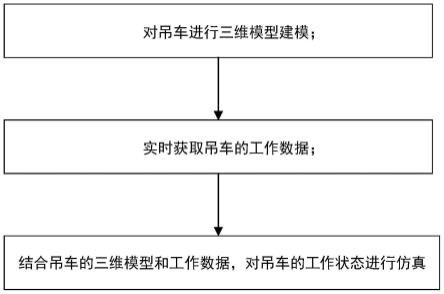
40.图1为实施例1所述的监测方法的流程图;
41.图2为实施例2所述的监测系统的示意图。
具体实施方式
42.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
43.实施例1
44.如图1,本实施例公开了一种基于仿真的吊车监测方法,方法包括如下步骤:
45.s1、终端对吊车进行三维模型建模。
46.s2、终端通过第一装置和第二装置,实时获取吊车的工作数据。
47.s3、终端结合吊车的三维模型及工作数据,对吊车的工作状态进行仿真。
48.具体的,在步骤s1中,包括如下步骤:
49.吊车在变电站内进行作业前,工作人员在终端上设定吊车的型号、第一装置安装在吊臂底端的位置(即第一装置与吊臂底端的距离d1,误差在0.1米内)、第二装置安装在吊臂顶端的位置(即第二装置与吊臂顶端的距离d2,误差在0.1米内)。终端根据设定的吊车的型号,获取对应吊车型号的各个活动机构的尺寸和位置关系,活动机构包括有吊车车身、抬升油缸、油缸、吊车转盘、一级大臂、二级大臂、三级大臂和四级大臂。
50.终端根据获取的吊车各个活动机构的尺寸和位置关系,进行一比一的三维模型建模,建模完成后,吊车工作人员原地简易操作车辆,观察吊车的三维模型是否同步运动。
51.具体的,在步骤s2中,包括如下步骤:
52.终端通过第一装置实时获取吊车位置和吊车的转向角,转向角包括俯仰角、横滚角和偏航角。
53.终端通过第一装置和第二装置实时获取吊车吊臂的工作长度;第一装置上设有激光雷达,第二装置上设有标靶,第一装置的激光雷达发出的光速打在第二装置的标靶上返回,即可测得第一装置与第二装置之间的距离d,加上d1与d2从而获得吊臂此时的工作长度l。
54.在上述实施例中,在终端上进行设定前,工作人员通过带强磁力底板将第一装置安装在吊臂底端,将第二装置安装在吊臂顶端,并打开第一装置的激光雷达,检查第二装置的标靶上是否出现激光红点,当观察到标靶上出现激光红点时,确认第一装置与第二装置完成校准。
55.具体的,在步骤s3中,包括如下步骤:
56.工作人员在吊车的三维模型中设置安全禁区,安全禁区可由每个设备的安全距离及高压线的安全距离划分,也可以工作人员手动添加。
57.终端根据第一装置的安装位置、第二装置的安装位置、实时获取到吊车位置和吊车吊臂的俯仰角、横滚角和偏航角、实时获取的吊车吊臂的工作长度,确定吊车及吊车吊臂的一个姿态。
58.终端通过采集多组吊车吊臂的俯仰角、横滚角和偏航角、吊车吊臂的工作长度,得到吊车及吊车吊臂的多个姿态。
59.终端将多个姿态结合设有安全禁区的吊车三维模型,按照时间顺序,对吊车的工作状态进行仿真。
60.对吊车的工作状态进行仿真时,工作人员在终端上监测仿真结果,观察吊车的三维模型是否有任意一个部位触碰到安全禁区,从而判断现实中的吊车是否触碰到安全区
域,判断实际的吊车操作是否安全。
61.实施例2
62.如图2,本实施例公开了一种基于仿真的吊车监测系统,包括第一装置、第二装置和终端。
63.第一装置包括用于实时获取吊车位置的uwb定位模块、用于实时获取吊臂的工作长度的激光测距模块、用于实时获取吊臂的转向角信息的imu转向角监测模块、用于设定吊车的型号和尺寸、第一装置的位置d1和第二装置的位置d2的输入模块以及用于将获取到的数据信息传输到终端的数据传输模块。
64.第二装置包括用于配合所述激光测距模块获取吊臂的工作长度的激光标靶模块。
65.终端用于根据接收数据传输模块传输的数据信息进行仿真。
66.具体的,系统还包括有固定装置,固定装置为带强磁力的底板;底板上设有一个磁力开关旋钮,使用时将磁力开关旋钮旋转到on档,产生强磁吸附力,将第一装置固定在吊车吊臂底端,将第二装置固定在吊车吊臂顶端;当需要卸载时,将磁力开关旋钮旋转到off档即可。
67.采用便携的带强磁力底板,方便即时装卸,成本更低,通用性更广,一般标准车型都能适配使用。
68.具体的,第一装置还包括用于显示获取到的的吊臂的工作长度及吊臂的转向角信息的液晶显示屏,转向角信息包括有俯仰角、横滚角和偏航角,工作人员可以通过液晶显示屏了解吊臂当前的工作长度及吊臂的俯仰角、横滚角和偏航角,工作人员还可以在终端上查看吊臂的工作长度及吊臂的俯仰角、横滚角和偏航角,并判断终端上的吊臂工作长度与吊臂转向角信息是否一致。
69.在上述实施例中,第一装置还包括用于向所述激光测距模块、数据传输模块、转向角监测模块及液晶显示屏供电的电源装置,电源装置是一组锂电池,满电状态能供电7*24小时以上。
70.在上述实施例中,俯仰角为吊臂竖直方向的角度,横滚角为水平方向转角,偏航角一般为0,当吊车所处地面不水平或者有一定坡度时,imu转向角监测模块会采集到偏航角。
71.在变电站内安装多个uwb基站,覆盖吊车的可活动区域,当吊车在变电站内移动或静止时,uwb定位模块通过基站的超宽带信号测距确定当前吊车的位置(可精确到0.1米),并通过数据传输模块将当前吊车位置发送给终端。
72.第一装置的激光测距模块设有激光雷达,激光雷达发出的光速打在第二装置的激光标靶模块上返回,可测出第一装置和第二装置之间的距离d,结合第一装置的位置d1和第二装置的位置d2可以获得当前吊臂的工作长度l,l=d d1 d2。
73.终端根据获得的吊车的型号和尺寸,进行吊车一比一三维模型建模;工作人员根据高压线安全距离与设备安全距离以及其他现实因素在三维模型中设置安全禁区;终端将获得的第一装置的位置、第二装置的位置、吊车的实时定位、吊臂的实时工作长度及吊车的实时转向角信息输入到吊车三维模型中,对吊车的工作状态进行仿真;工作人员通过实时仿真,观察仿真中吊臂与安全禁区的空间位置距离关系,从而判断现实中的吊车是否触碰到安全禁区,判断实际吊车操作是否安全。
74.当标定一条高压线为220kv高压时,终端上应该可以观察到该高压线周围形成一
个孔径为6米的红色半透明危险管道空间(220kv电压对应的安全距离为6米);当终端上显示吊车或吊车吊臂与安全禁区的距离小于1米时,终端发出鸣笛提示;当终端上显示吊车或吊车吊臂进入安全禁区时,终端发出响亮鸣笛报警。
75.在变电站里安全禁区往往是肉眼不可见的,需要工作人员凭感觉和经验判断;传统的吊车作业是两人配合,一人负责操作,一人负责在吊车外指引和提示,外部的作业指导员存在一定的误判风险,从而造成安全隐患;本发明通过结合监测与仿真,可以让外部的作业指导员通过终端直观预判吊车和吊臂是否触碰到安全禁区,实现更好的作业指导和危险预判。
76.本发明能够提升传统变电站吊车防触碰装置的数字化程度和风险感知能力,优化防触碰能力,采用实时监测与仿真代替传统纯实物感应波反射距离探测的方式,达到吊车安全监控可视化的效果。
77.传统吊车防触碰装置的反馈方式是开关式或离散式,即发生危险时通过声音告警或在不同危险等级时提示不同信号,相较于传统的吊车定位和防触碰装置,本发明同时具备定位功能和安全禁区监测功能,传统变电站吊车安全装置一般只涉及其中一种;本发明是对吊车工作状态进行仿真,且三维模型中设有安全禁区,对吊车工作状态的监测是连续和可视的,吊车作业人员和外部监控人员都可以通过终端直观地判断吊车和吊臂及吊臂上的物品与安全禁区的空间距离关系。
78.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,故凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。