1.本发明涉及一种翅片的集料装置。
背景技术:
2.换热器散热翅片经冲床冲压好后,一般是通过翅片集料装置将翅片码垛堆集起来。现有集料装置接料、取料的工位转换有平移、旋转两种形式,由于平移两工位要不停的左右改变取料的地点,所以给生产带来很大的不便,所以现有集料装置多为旋转结构。
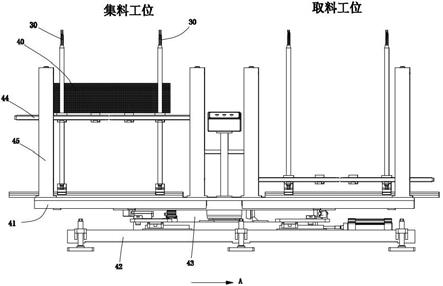
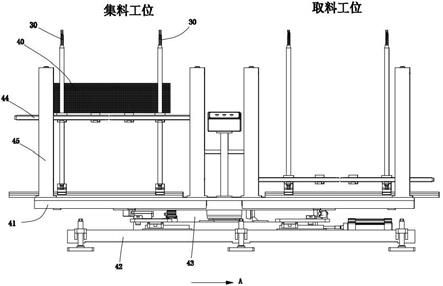
3.如图1所示为旋转两工位的集料装置:一个集料工位,一个取料工位,翅片40通过集料针30引导下降集料,由于集料针细而且长,所以在竖直状态下,上部会有不同程度的倾斜,为了使翅片更容易落下,所以设置了上集料板44,集料时,上集料板44处于集料针上部,慢慢随着翅片的堆积间歇性的下降,直到集满料后停止,所以每个工位都要配备上集料板的升降驱动机构45,集满料后,冲压主机停机,然后整个集料装置向远离冲床的方向平移一段距离,即移动架43带动其上的所有安装部件沿着a方向移动,移动到位后,然后通过转盘41旋转180度交换位置,这样移动一端距离可防止转动时与冲床模具碰撞,旋转到位后,整个集料装置又沿a方向反向退回,集满料的工位进行取料,另一个工位继续集料,整个装置安装在底座42上。这样的集料装置结构复杂,零件繁多,因为还要在平移架43上实现整体旋转,所以刚性和稳定性差,占地面积也大,最大的缺点就是因为整体旋转,旋转半径大,转动惯量大,工位越多,旋转半径越大,稳定性越差。
技术实现要素:
4.本发明所要解决的技术问题是克服现有技术的上述缺陷而提供一种内回转集料装置,使其能够方便移动集料架,适应多工位操作。
5.本发明解决上述技术问题所采用的技术方案为:一种内回转集料装置,包括集料架、底座、内转盘和回转驱动机构,所述内转盘和回转驱动机构安装在底座上,所述内转盘与回转驱动机构连接,回转驱动机构驱动转盘相对底座转动,所述内转盘上设置移送轨道,集料架上设置与移送轨道配合的移送机构并可通过移送轨道而移动。
6.更具体地,所述回转驱动机构包括电机、主动齿轮、齿轮,所述电机安装在底座上,其输出轴上安装主动齿轮,所述齿轮由底座滚动支撑,所述主动齿轮与齿轮啮合,所述内转盘安装在齿轮上,电机带动主动齿轮转动,然后通过齿轮带动其上安装的内转盘转动,转动角度可根据实际情况,由电机转动角度确定。
7.更好地,所述底座上设置操作工位,操作工位上设置工位移送轨道,工位移送轨道可与内转盘上的移送轨道连接,集料架上的移送机构可通过工位移送轨道而移动,这样集料架可在多个工位和中间的内转盘上移动,使结构更紧凑,移动更方便。
8.更具体地,所述移送轨道为导轨,所述集料架上的移动机构为滑块,滑块置于导轨上并可在导轨上移动。
9.更好地,还包括安装在内转盘上的驱动机构,所述驱动机构与移动集料架连接和直线移动,使集料架能够在操作工位和内转盘间移动。
10.更具体地,所述驱动机构为气缸,所述气缸安装在内转盘上,气缸活塞杆与集料架连接并驱动集料架移动,使集料架能够在操作工位和内转盘间移动。
11.更好地,所述集料架底部为移动板,所述移动板为h形,气缸活塞杆与移动板“h”形的横板连接,通过气缸活塞杆的伸缩便可带动移动集料架移动,这样,能够充分利用集料架底部空间,不会干涉能够集料架的其他部位。
12.更好地,所述移动集料架包括支撑板、集料针安装板、托盘、移动板、隔套、护板、护板安装板和集料针;所述集料针安装板二端分别安装在支撑板上,所述托盘设置在集料针安装板上方,其包括连接在一起的中间的翅片支撑板和二侧的支撑条,翅片支撑板中设置集料针通孔,支撑条二端架在护板安装板上,所述护板安装板设置在集料针安装板上方,其上垂直安装护板,其二端能引导支撑条二端,所述隔套下部安装在集料针安装板上,隔套上部插入护板安装板,将护板安装板与集料针安装板隔开,并支撑护板安装板,所述集料针安装在集料板安装板上,并向上穿过托盘中间的翅片支撑板,这样护板一方面可以在托盘升或降时起到导向作用,还可以对二块护板中间堆积的翅片有扶正的作用。
13.为了更好地对支撑板定位,使集料时更稳定,在支撑板和移动板之间还设置了电磁铁,通过电磁铁的得电产生磁力,使支撑板和移动板吸为一体,又可通过电磁铁失电失去磁力,使支撑板和移动板分开。
14.更好地,所述支撑板设置在移动板的上方,其两端通过安装在移动板
ꢀ“
h”形两侧的竖板上的定位销与移动板连接,这样可以更好地由移动板对支撑板定位,此外,采用这种连接方式,当支撑板上集满翅片时,也方便移动集料架除移动板外连同翅片跺整体被移动或取用。
15.更好地,还包括托盘升降驱动机构,所述托盘升降驱动机构设置在底座上,其包括电机、传动机构、丝杆、丝杆螺母和托板,所述电机安装在底座上,所述丝杆一端由底座滚动支撑,另一端由防护支撑座滚动支撑,所述丝杆螺母穿套在丝杆外,所述托板两端分别与一个丝杆螺母连接,电机驱动传动机构同时带动四根丝杆转动,通过丝杆螺母带动托板上升或下降。当移动集料架移动到位后,使其托盘的两端分别搭接在托板上,便可通过托盘升降驱动机构带动托盘上升或下降。
16.更具体地,所述传动机构为链轮传动机构,所述链轮传动机构包括:主动链轮、链轮、中间链轮和链条,各个链轮间通过链条连接和传动,每个链轮都安装在相应的丝杆上。
17.与现有技术相比,本发明的优点在于:1、通过设置可移动式的移动集料架,并通过相应的轨道连接,可方便的使移动集料架从底座移动到内转盘上,同时这种可移动的集料架使翅片跺可以被整体运输,方便取用;也可对现有集料装置进行改造,替代整体移动,改为只移动集料架,提高集料装置的刚性和稳定性。
18.2、通过设置内转盘,结合移动集料架,可只将移动集料架都移到内转盘上,然后旋转相应角度后再移到各工位,这样整个集料装置相对现有集料装置,相同工位的集料装置,只移动或旋转移动集料架,底座及其他部件固定不动,旋转半径小,转动惯量小,所以刚性和稳定性好,而且结构简单,占地面积小。
19.3、可移动式集料架结合内转盘后,只需仅移动集料针上的翅片跺,可方便设计多个翅片深度加工工位,每个工位的功能可根据实际需要而定,为翅片的加片、装边板、穿管等后续工艺提供了空间,为换热器集成化生产提供了方便,而且可替代现有集料装置,与冲床对接。
20.4、与现有多工位机构相比,除对接翅片集料工位外,其他工位都可省去托盘升降装置,节约了生产成本,简化了结构。
附图说明
21.图1为现有集料装置的结构示意图。
22.图2为本发明实施例一种内回转集料装置的平面结构示意图。
23.图3为本发明实施例一种内回转集料装置的内转盘结构示意图。
24.图4为本发明实施例可移动式集料装置。
25.图5为本发明实施例二工位的集料装置工作状态前的示意图。
26.图6为本发明实施例二工位的集料装置运移状态时的示意图。
27.图7为本发明实施例二工位的集料装置运移状态时的示意图。
28.图8为本发明实施例二工位的集料装置运移状态后的示意图。
29.图9为本发明实施例四工位的集料装置的俯视图。
30.图10为本发明实施例四工位的集料装置去掉集料架时的俯视图。
31.图11为本发明实施例链轮传动机构的结构示意图。
具体实施方式
32.以下结合附图、实施例对本发明作进一步详细描述。
33.如图2-11所示,集料装置包括移动集料架4、底座1、内转盘2和回转驱动机构,所述内转盘2和回转驱动机构安装在底座1上,所述内转盘2与回转驱动机构连接,通过回转驱动机构驱动转盘2相对底座1转动设定角度。
34.如图3所示,所述回转驱动机构包括:电机301、主动齿轮302、大齿轮303。所述电机301安装在底座1上,其输出轴上安装有主动齿轮302,所述大齿轮303由底座1滚动支撑,所述主动齿轮302与大齿轮303啮合,所述内转盘2安装在大齿轮303上;这样由电机301带动主动齿轮302转动,然后通过大齿轮303带动其上安装的内转盘2转动,转动角度根据实际确定。
35.上述移动集料架4包括支撑板401、集料针安装板402、托盘403、移动板404、隔套405、护板406、护板安装板407和集料针30;所述集料针安装板402二端分别安装在支撑板401上,所述托盘403设置在集料针安装板402上方,其包括连接在一起的中间的翅片支撑板4032和二侧的支撑条4031,翅片支撑板4032中设置集料针通孔,支撑条4031二端40311架在护板安装板407上,所述护板安装板407设置在集料针安装板402上方,其上垂直安装护板406,其二端4071能引导支撑条4031二端40311,所述隔套405下部安装在集料针安装板402上,隔套405上部插入护板安装板407,将护板安装板407与集料针安装板402隔开,并支撑护板安装板407,所述集料针30安装在集料板安装板402上,并向上穿过托盘403中间的翅片支撑板4032。
36.上述移动集料架4接收翅片时,可以先提升托盘403,所述护板406一方面可以在托盘403升或降时起到导向作用,还可以对二块护板406中间堆积的翅片有扶正的作用。
37.所述移动板404为h形,所述支撑板401设置在移动板404的上方,其两端通过安装在移动板404“h”形两侧的竖板4041上的定位销408与移动板404连接,这样可以更好地对支撑板401定位,采用这种连接方式,当集满翅片时,也方便移动集料架4除移动板404外连同翅片跺整体被移动或取用。
38.为了更好地对支撑板401定位,使集料时更稳定,在支撑板401和移动板404之间还设置了电磁铁,通过电磁铁的得电,使支撑板401和移动板404合为一体,也可以通过电磁铁失电,使支撑板401和移动板404可分开。
39.还包括安装在内转盘2上的驱动机构5,所述驱动机构5与移动集料架4连接,使其可以直线移动。
40.本实施例中,所述驱动机构为气缸5,所述气缸5安装在内转盘2上,其活塞杆与移动板404“h”形的横板(图中未示)连接,这样通过活塞杆的伸缩便可带动移动集料架4移动。
41.更好地,气缸5的活塞杆与移动板404“h”形横板的连接可通过电磁铁连接,通过电磁铁的得电,将两者合二为一,通过电磁铁的失电,两者分开,这样使用更灵活。
42.为了使移动集料架能够与相应的操作工位移动平稳,底座1上设置轨道101,内转盘2上也设置与轨道101对应的轨道201,h形移动板404的两侧竖板4041下部设置有与轨道101和201对应的滑块4042,这样移动集料架4便可以通过气缸5活塞杆的伸缩,移到底座1上或移到内转盘2上。
43.所述轨道101和201可为图2中所述的两条轨道,也可为一条轨道,或者其它形式的轨道,与其对应的滑块4042也做相应的变化。
44.还包括托盘升降驱动机构6,所述驱动机构6设置在底座1上,靠近冲床侧,如图2所示,其包括电机601、传动机构、丝杆602、丝杆螺母603和托板604;所述电机601安装在底座1上,所述丝杆602一端由底座1滚动支撑,另一端由防护支撑座605滚动支撑,所述丝杆螺母603穿套在丝杆602外,所述托板604两端分别与一个丝杆螺母603连接;电机601驱动传动机构同时带动四根丝杆602转动,通过丝杆螺母603带动托板604上升或下降。当移动集料架4移动,使其托盘403的两端分别搭接在托板604上,便可带动托盘403上升或下降。
45.所述传动机构为链轮传动机构,也可以为带轮传动等机构,本实施例采用链轮传动机构。
46.如图11所示,所述链轮传动机构包括:主动链轮606、链轮607、中间链轮608和链条609,各个链轮间通过链条609连接和传动,每个链轮607都安装在丝杆602上。
47.集料时,移动集料架4被气缸5推到底座101上,使托盘403的两端搭接在托板604上,托盘升降驱动机构6带动托盘403上升到集料针30的上部指定位置,随着翅片堆积,托盘403间歇性的下降,直到接满料下降到设定位置停止,保证了翅片跺堆集的顺利完成。由于集料针细而且长,所以在竖直状态下,上部会有不同程度的倾斜,为了使翅片更容易落下,所以设置了上述托盘403。集料完成后,气缸5的活塞杆退回,将移动集料架4移到内转盘2上待用。
48.本集料装置可应用做成内转动多工位集料装置,以下以两工位和四工位为例进行介绍。
49.如图5-8所示为内转动两工位集料装置,至少包含一个上述的集料工位,还包含另一个工位,可用来下料或者与其他设备连接,工位的功能可根据实际需要而定。两个工位沿转盘2均布设置,都包含轨道101,通过中间的轨道201连接,完成移动集料架4的平移及旋转换位。
50.工作过程如下:如图5所示,集料工位集料完成后,两个气缸5的活塞杆都退回,将两个移动集料架4都移到内转盘2上(如图6所示),回转驱动机构驱动转盘2转动180
°
(如图7所示),然后两个气缸5的活塞杆伸出,推动两个移动集料架4到底座1上(如图8所示),空的移动集料架被推到集料工位,继续集料,集满翅片的移动集料架被推到另一个工位,可以通过机械手或其它取跺装置,使整个移动集料架4除移动板404外连同翅片跺一起被取下,这样整体搬运翅片跺不会散开或坍塌,搬运方便;由于整个移动集料架可以移动,也方便与自动穿管设备连接,用途广泛。
51.如图9-10所示为内转动四工位集料装置,底座1上至少包含一个上述的集料工位,还包含另外三个工位:第二工位、第三工位、第四工位,每个工位的功能可根据实际需要而定,比如上板、插管、胀管、扩管等等。
52.四个工位沿转盘均布设置,都包含轨道101,转盘2上也设置有轨道101对应的轨道201,通过两个轨道衔接,完成移动集料架4的平移及旋转换位。
53.工作过程如下:如图9-10所示,集料工位集料完成后,四个气缸5的活塞杆都退回,将四个移动集料架4通过对应的轨道201移到内转盘2上(如图9所示),回转驱动机构驱动转盘2每次转动90
°
,然后四个气缸5的活塞杆伸出,推动四个移动集料架4再通过对应的轨道101回到底座1上,这样集满翅片的移动集料架4从集料工位转到第二工位,然后再重复以上的操作,被转到第三工位,再到第四工位,每个工位完成对翅片跺的相应操作,空的移动集料架继续在集料工位进行集料。
54.当然,还可根据需要,在底座1上设置其它数量的工位,还可以将其他工位直接设置在相应的操作台上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。