1.本实用新型涉及遥操作技术领域,特别涉及一种基于同构型机械臂的遥操作系统。
背景技术:
2.机器人遥操作系统是在人员操作主控端设备情况下,实现从控端机器人同步操作的一种远距离控制系统,该系统可以完成复杂环境下人类无法执行的困难操作任务。远程遥操作系统的核心技术包含远程控制、环境感知、远程通信和实时视频传输等。通过在主控端复现从控端与环境间的交互力,并提供从控端作业现场的实时监控视频,可以提升主控端人员操作的准确性和工作效率。该技术在未来远程医疗、抢险、工业及特种应用中能够最大化提升资源使用率、维护人类的生命安全,创造出巨大的经济效益和社会效益。
3.专利公开号为cn113612928a的中国专利公开了一种遥操作系统、遥操作方法及芯片,该专利提出了由主操作机械臂、从操作机械臂和视觉系统组成的遥操作系统。该系统需要控制系统与视觉系统交互,存在控制链路复杂的问题,且缺乏从控端机械臂与作业环境间的力触觉信息反馈,主控端操作者无法真实感受从控端机械臂与环境间的交互状态。
4.专利公开号为cn113829357a的中国专利公开了一种机器人手臂遥操作方法、装置、系统及介质,该专利提出了一种基于操作人员的手臂位置信息采集,并利用该位置信息实现对机械臂的遥操作控制技术。由于该系统的手臂识别方式是基于cnn骨干网络特征提取,存在目标识别不稳定、无法控制机械臂姿态、手臂控制导致运动范围较小等问题。
5.综上所述,目前传统机器人的遥操作技术主要方法是通过操作主控端设备实现从控端机械臂在空间内的姿态控制,且存在控制链路复杂、操作难度大、力感知交互差等问题。在传统遥操作技术的基础上也存在基于外骨骼装置实现的方式(如数据手套等),但此类外骨骼装置类的应用普遍存在装置自重较大且灵活性差等问题。
技术实现要素:
6.针对上述问题,本实用新型提供了一种基于同构型机械臂的遥操作系统,以提升用户在主控端的操作流畅性、增强用户对从控端作业环境的力感知和视觉感知水平。
7.本实用新型的技术方案为:
8.一种基于同构型机械臂的遥操作系统,包括主控端和从控端,
9.主控端包括主机械臂、主计算机pc和第一6维力/力矩传感器,所述第一6维力/力矩传感器安装于主机械臂末端的法兰位置,主机械臂和主计算机pc通过局域网连接;
10.从控端包括从机械臂、从计算机pc、第二6维力/力矩传感器和监控设备,所述第二6维力/力矩传感器安装于从机械臂末端的法兰位置,所述从机械臂和监控设备均与所述从计算机pc连接,所述监控设备为视频监控设备;
11.所述主计算机pc和从计算机pc之间通信连接,监控设备采集到的音视频信息在主计算机pc上显示和播放。
12.作为优选,所述从控端接收所述主控端的控制信号,控制所述从机械臂跟随主机械臂作同步动作;
13.所述主控端接收所述第二6维力/力矩传感器的检测信息,所述主机械臂通过控制主机械臂上的关节扭矩复现所述从机械臂上的6维力/力矩信息。
14.作为优选,所述主控端将主机械臂末端所要实现的力矩信息转化为主机械臂的关节扭矩输出给主机械臂的pid控制器。
15.作为优选,所述主控端和从控端均设有滤波器,对接收到的信号进行滤波处理。
16.作为优选,所述主计算机pc和从计算机pc之间通过5g网络通道进行数据交互,采用的设备为cpe设备。
17.作为优选,所述主机械臂和从主机械臂均为wam机械臂。
18.作为优选,所述从计算机pc与所述从机械臂通过局域网连接,所述监控设备通过usb数据线与从计算机pc连接。
19.综上所述,本实用新型的有益效果有:
20.1.提出了一种将传统机械臂控制与视觉和力觉相结合的远程遥操作系统,增强用户对从控端作业环境的力感知和视觉感知水平;
21.2.通过实时重力补偿实现主从的端零力控制,实现主从端机械臂在远程遥操作方面的应用,提高了远程遥操作的稳定性、流畅性和安全性;
22.3.实现主控端和从控端双边实时视频流和力反馈的数据传输,通过视觉和触觉信息反馈提高用户临场感;
23.4.对遥操作普遍存在时延导致稳定性差的问题进行优化处理,保证了机械臂远程操作过程中控制的稳定性和安全性;
24.5.搭建了一个完备的远程控制系统和环境感知系统,为机械臂远程控制技术在医疗行业、工业生产等领域应用提供较好的基础,实现远程医疗和远程协作任务,最大化提高医疗资源的利用率和生产生活的安全保障。
附图说明
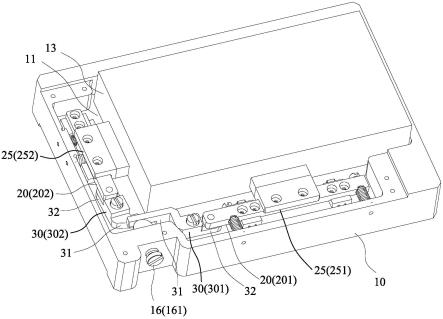
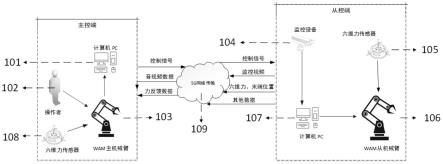
25.图1是本实用新型中基于同构型机械臂的遥操作系统的示意图;
26.图2是本实用新型中基于同构型机械臂的遥操作方法的流程示意图;
27.图3是本实用新型中主控端数据流处理流程示意图;
28.图4是本实用新型中从控端数据流处理流程示意图;
29.图5是本实用新型中监控设备实时视频传输流程示意图;
30.图6是本实用新型中遥操作通信丢包处理流程示意图。
31.图1中,101、主计算机pc;102、操作者;103、主机械臂;104、监控设备;105、第二6维力/力矩传感器;106、从机械臂;107、从计算机pc;108、第一6维力/力矩传感器;109、cpe设备。
具体实施方式
32.下面结合附图详细说明本实用新型的具体实施方式。
33.本实用新型中,第一6维力/力矩传感器和第二6维力/力矩传感器均为6维力/力矩
传感器,6维力/力矩传感器为6维力传感器或6维力矩传感器或是二者的结合。
34.实施例:参考图1,一种基于同构型机械臂的遥操作系统,包括主控端和从控端。
35.主控端包括主机械臂、主计算机pc和第一6维力/力矩传感器,所述第一6维力/力矩传感器安装于主机械臂末端的法兰位置,主机械臂和主计算机pc通过局域网连接。操作者在主控端进行操作。
36.从控端包括从机械臂、从计算机pc、第二6维力/力矩传感器和监控设备,所述第二6维力/力矩传感器安装于从机械臂末端的法兰位置,所述从机械臂和监控设备均与所述从计算机pc连接,所述监控设备为视频监控设备。
37.所述主计算机pc和从计算机pc之间通信连接,监控设备采集到的音视频信息在主计算机pc上显示和播放。
38.所述从控端接收所述主控端的控制信号,控制所述从机械臂跟随主机械臂作同步动作。
39.所述主控端接收所述第二6维力/力矩传感器的检测信息,所述主机械臂通过控制主机械臂上的关节扭矩复现所述从机械臂上的6维力/力矩信息。
40.所述主控端将主机械臂末端所要实现的力矩信息转化为主机械臂的关节扭矩输出给主机械臂的pid控制器。
41.所述主控端和从控端均设有滤波器,对接收到的信号进行滤波处理。
42.所述主计算机pc和从计算机pc之间通过5g网络通道进行数据交互,采用的设备为cpe设备。
43.所述主机械臂和从主机械臂均为wam机械臂,本实用新型中的wam机械臂为专利号为us20160367428a1的美国专利公开的一种机械臂,wam是一款高度灵活且逆向可驱的七自由度绳驱机械臂,它具有反向可驱性、零间隙、任意减速比、零摩擦等特性,具有良好的柔顺性和安全性,非常适用于人机交互场景,用户可以轻松拖拽机械臂进行运动。
44.所述从计算机pc与所述从机械臂通过局域网连接,所述监控设备通过usb数据线与从计算机pc连接。
45.上述系统的操作方法包括:
46.所述主控端向从控端发送控制信号,所述从机械臂响应该信号并作出与主机械臂同步的动作(图2中,jpm,jps分别表示主控端和从控端的机械臂关节信息);
47.所述从控端向主控端发送由第二6维力/力矩传感器获得的力反馈数据([f
s ts]),主控端也会通过主机械臂末端的第一6维力/力矩传感器采集本地的力/力矩([f
m tm])。所述主计算机pc根据力反馈数据生成力矩复现控制信号,主机械臂响应该信号并控制主机械臂上的关节扭矩,在主机械臂上复现从机械臂上的力矩信息。
[0048]
在主控端和从控端分别加入针对主机械臂和从机械臂的实时重力补偿(即图2中的),以实现用户在遥操作时能够轻松拖拽机械臂进行运动。
[0049]
具体的,从控端的控制方法包括:
[0050]
主控端向从控端发送主控端关节角信息;
[0051]
从控端接收到主控端实时关节角信息时,对接收到的关节角信息进行滤波处理,滤掉高频成分数据;本实用新型采用一阶低通滤波器(不仅限于一阶低通滤波器)进行滤波,其传递函数h(s)和滤波过程描述形式如下:
[0052][0053][0054]
其中fc为该滤波器的截止频率,q
t
表示主控端输入的关节角,qt-1表示上一时刻的关节角,q
filter
表示滤波后的关节角,t表示采样周期。该滤波器可以有效滤掉高频成分的数据,能够有效优化传输过程中产生的异常和突变数据,实现输入端关节控制消息的平滑化,针对该滤波器引入的滞后效应通过设置恰当的截止频率来缓解。
[0055]
在利用滤波器来保证控制信号的对扰动的抗性,从控端继续采用三次样条插值算法对主端关节角数据进行插值,保证了关节控制信号输入的平滑性。将得到插值放入缓存器并在不同的时间片输入机械臂的位置pid控制器。通过上述方式可以保证从控端机械臂运动的连续性,提高了从端运动的平缓性和稳定性,降低因传输时延导致的抖动风险。
[0056]
主控端的控制方法包括:
[0057]
从控端向主控端发送从机械臂上的力矩信息;
[0058]
对主机械臂利用dh参数建模方法进行运动学建模,根据运动学模型计算位置雅克比矩阵,进而可以得到力雅克比矩阵;
[0059]
通过力雅克比矩阵将从机械臂上的力矩信息转换为关节扭矩并输出给主机械臂。
[0060]
通过机械臂的力雅克比矩阵可以实现末端输出力和关节扭矩之间的变化关系如下:
[0061]
τ=j
t
·
(f
slide
f
master
)
[0062]
其中τ表示关节扭矩,f
master
,f
slide
代表主控端和从控端6维力/力矩传感器数据通过一阶低通滤波器滤波后的数据,通过上述方法将从控端的6维力/力矩传感数据转化成主控端各个关节扭矩输出,使得用户在拖动末端时就能够感受到从控端环境作用于机械臂的反馈力情况,为用户提供实时的力触觉临场感。
[0063]
监控设备的采集信息的传输方法包括:
[0064]
图5是本系统实时视频传输系统的实现流程,首先利用从控端的从计算机pc驱动并读取监控设备的实时视频流,利用编码器(x264)对视频流进行编码压缩并将数据写入到fifo管道;同时启动另一线程对fifo管道内的视频流数据进行读取并推送至rtsp服务器,并通过基于live555架构的rtsp服务器实现在本地端口对外的视频流发布。通过上述双线程同时操作fifo管道和rtsp推送的技术就可以实现实时视频流发布,主控端通过对实时视频流进行解码就可以查看从控端作业环境的实时监控视频,通过远程控制技术、力觉在现技术和实时视频传输的体系最终实现了基于5g的远程遥操作系统。
[0065]
主控端和从控端的网络通信采用5g网络传输,5g网络具有高网速、低延时、高可靠的特性,可以有效保障遥操作系统的实时性和稳定性。在5g网络提供的通道中本实用新型采用了基于udp协议的控制数据(实时关节信息和6维力/力矩消息)传输链路。采用udp的优势在于具有较好的实时性,且传输效率比tcp更高,能够很好地满足遥操作这种对高传输速
率和实时性的要求;此外,wam机械臂本身的工作频率高达500hz,这一特性也能够大大降低因udp通信中低概率丢包所引起的抖动问题,通过wam高频率数据收发特性与udp高效率的通信相结合,可以有效保障控制系统的稳定性和实时性。本系统对因外界不可抗拒因素(如网口掉落、线缆断开等)导致的网络中断也提供了相应的保护机制,系统能够实时监控主从端实时的收包数,若超过遥操作允许的丢包阈值,则从控端将会主动断开主控端的控制,并切换至零力拖动模式以保障从控端的安全,避免了因网络异常导致的意外事故(具体如图6所示)。
[0066]
以上所述的仅是本实用新型的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。